Potrebbero piacerti anche
- L01 Operational AmplifierDocumento27 pagineL01 Operational AmplifierRamaDinakaranNessuna valutazione finora
- Operational AmplifierDocumento29 pagineOperational AmplifierTaha Al-abedNessuna valutazione finora
- Makalah Signal ConditioningDocumento64 pagineMakalah Signal Conditioningw4w4n_s3mk4n1s4Nessuna valutazione finora
- Sistec: Sagar Group of InstitutionsDocumento28 pagineSistec: Sagar Group of InstitutionsdeeptimalviyaNessuna valutazione finora
- Module 2 Op-AmpDocumento26 pagineModule 2 Op-AmpSTUDENTS OF DOE CUSATNessuna valutazione finora
- CH 3sDocumento67 pagineCH 3sSantosh GoudarNessuna valutazione finora
- ECADDocumento110 pagineECADJanica Janelle ReloxeNessuna valutazione finora
- OPAMPDocumento24 pagineOPAMPEr Akhilesh SinghNessuna valutazione finora
- Op-Amp Applications: Anthony Herbland Email: A.j.m.herbland@herts - Ac.ukDocumento28 pagineOp-Amp Applications: Anthony Herbland Email: A.j.m.herbland@herts - Ac.ukJai GaizinNessuna valutazione finora
- LIC Manual PDFDocumento55 pagineLIC Manual PDFmekalajesiNessuna valutazione finora
- The "operationalDocumento27 pagineThe "operationaladilNessuna valutazione finora
- Ch-3 Signal Conditioning and Data Transmission (Autosaved)Documento67 pagineCh-3 Signal Conditioning and Data Transmission (Autosaved)Moges AsefaNessuna valutazione finora
- Chapter 8Documento40 pagineChapter 8UMMU MARDHIAH ABDUL HALIMNessuna valutazione finora
- OpAmp BWDocumento52 pagineOpAmp BW3dspider100% (1)
- Microelectronic CircuitsDocumento39 pagineMicroelectronic CircuitsVictor FrankensteinNessuna valutazione finora
- Lic May-June 2017Documento15 pagineLic May-June 2017santhosh sekarNessuna valutazione finora
- LLec15 Thermistor ADC PDFDocumento6 pagineLLec15 Thermistor ADC PDFNguyễn Thị Tài LinhNessuna valutazione finora
- Razavi Lectures Ch13 15Documento161 pagineRazavi Lectures Ch13 15maxsilverNessuna valutazione finora
- Lic Lab ManualDocumento89 pagineLic Lab ManualKALAIMATHI100% (1)
- Ch2a Op Amp v3Documento66 pagineCh2a Op Amp v3sadyehclenNessuna valutazione finora
- Ics Basic SimulaDocumento47 pagineIcs Basic Simulasumi36117Nessuna valutazione finora
- Converter & Timing CircuitDocumento16 pagineConverter & Timing Circuityoboiiii649Nessuna valutazione finora
- Intro Op AmpDocumento44 pagineIntro Op AmpNimish PrabhakarNessuna valutazione finora
- RC Phase Shift Oscillator and RC Coupled Ce Amplifier - Lab ExperimentDocumento8 pagineRC Phase Shift Oscillator and RC Coupled Ce Amplifier - Lab ExperimentMani BharathiNessuna valutazione finora
- LIC Manual MDocumento76 pagineLIC Manual MjananirajuNessuna valutazione finora
- OPAMP741: Structure and Applications of the Operational Amplifier 741Documento45 pagineOPAMP741: Structure and Applications of the Operational Amplifier 741Rau Muống XàoNessuna valutazione finora
- LM 13700Documento24 pagineLM 13700Pinto Condori JesusNessuna valutazione finora
- MC3303 MC3403 - MC3503: Quad Bipolar Operational AmplifiersDocumento10 pagineMC3303 MC3403 - MC3503: Quad Bipolar Operational AmplifiersAmirNessuna valutazione finora
- Part I: Amplifier FundamentalsDocumento29 paginePart I: Amplifier FundamentalsbinukirubaNessuna valutazione finora
- LB1980 DatasheetDocumento6 pagineLB1980 DatasheetMetalloyNessuna valutazione finora
- Digital to Analog Converter (DAC) Types and SpecificationsDocumento39 pagineDigital to Analog Converter (DAC) Types and SpecificationsAlem AklilNessuna valutazione finora
- Introduction to Operational AmplifiersDocumento32 pagineIntroduction to Operational Amplifiersjaya1816100% (1)
- Operational AmplifierDocumento29 pagineOperational AmplifierAlit WinayaNessuna valutazione finora
- 9 CE AmplifierDocumento5 pagine9 CE AmplifierAnsh PratapNessuna valutazione finora
- Analog MeterDocumento31 pagineAnalog MeterAnooshe Asadian100% (1)
- TDA7440D: Tone Control Digitally Controlled Audio ProcessorDocumento17 pagineTDA7440D: Tone Control Digitally Controlled Audio ProcessorJimmy R. Calderon GualeNessuna valutazione finora
- Linear Amplifiers and OpAmps FundamentalsDocumento19 pagineLinear Amplifiers and OpAmps FundamentalsAnimesh GhoshNessuna valutazione finora
- Analog Signal Processing Using Operational Amplifiers: Ping GuoDocumento43 pagineAnalog Signal Processing Using Operational Amplifiers: Ping Guobec_lucarioNessuna valutazione finora
- Introduction to Electronics Chapter 1Documento36 pagineIntroduction to Electronics Chapter 1詹勳智Nessuna valutazione finora
- OpampDocumento51 pagineOpampMitesh BhagoraNessuna valutazione finora
- Topology Review DC DC ConvertersDocumento54 pagineTopology Review DC DC ConvertersaknuslNessuna valutazione finora
- Lic Unit 1 (1) eDocumento114 pagineLic Unit 1 (1) eganeshNessuna valutazione finora
- Nonlinear Op-Amp Circuits and Logarithmic AmplifiersDocumento31 pagineNonlinear Op-Amp Circuits and Logarithmic AmplifiersBeth ValerdiNessuna valutazione finora
- Op-Amp ApplicationsDocumento146 pagineOp-Amp ApplicationsPB PrasathNessuna valutazione finora
- Objectives:: Electronics I Laboratory - EXPERIMENT 10 Common Emitter AmplifierDocumento6 pagineObjectives:: Electronics I Laboratory - EXPERIMENT 10 Common Emitter AmplifierRabindraMaharanaNessuna valutazione finora
- Unit 2: Definition of IcDocumento26 pagineUnit 2: Definition of Icsai kiranNessuna valutazione finora
- 3 AC AmplificationDocumento58 pagine3 AC AmplificationAnthony BeltranNessuna valutazione finora
- UNIT3 - Introduction To IC Technology - 290617 - EditedDocumento82 pagineUNIT3 - Introduction To IC Technology - 290617 - EditedKISHAN SHUKLANessuna valutazione finora
- Maths OperationDocumento27 pagineMaths OperationTurkish GatxyNessuna valutazione finora
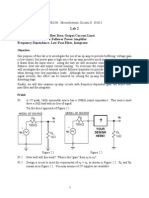
- ECE3204 D2013 Lab2Documento9 pagineECE3204 D2013 Lab2Khalil2097Nessuna valutazione finora
- Transito RampDocumento30 pagineTransito RampMarium AliNessuna valutazione finora
- Chapter 6 - OpAmpDocumento7 pagineChapter 6 - OpAmpOm PrakashNessuna valutazione finora
- Unisonic Technologies Co.,: Low Voltage Audio Power AmplifierDocumento7 pagineUnisonic Technologies Co.,: Low Voltage Audio Power Amplifierantonio_forgioneNessuna valutazione finora
- Output Stages and Power Amplifiers: Insights OnDocumento31 pagineOutput Stages and Power Amplifiers: Insights Onbipin bamNessuna valutazione finora
- Tda 7439Documento17 pagineTda 7439Arwana ChipmunksNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorDa Everand110 Waveform Generator Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Introduction To Computers and ProgrammingDocumento15 pagineIntroduction To Computers and ProgrammingSaravanakumar PichumaniNessuna valutazione finora
- AmplifierDocumento63 pagineAmplifierSaravanakumar Pichumani100% (1)
- CD 36 Manual For Preparation of Ph.d.m.sDocumento3 pagineCD 36 Manual For Preparation of Ph.d.m.sSaravanakumar PichumaniNessuna valutazione finora
- Cpps Branch List Sep 09Documento6 pagineCpps Branch List Sep 09Saravanakumar PichumaniNessuna valutazione finora
- Operational AmplifierDocumento19 pagineOperational AmplifierTanvir Ahmed MunnaNessuna valutazione finora
- Analog and Digital Ele Krishna University PDFDocumento58 pagineAnalog and Digital Ele Krishna University PDFChandar Rao Veeranki100% (1)
- UNIT3 - Introduction To IC Technology - 290617 - EditedDocumento82 pagineUNIT3 - Introduction To IC Technology - 290617 - EditedKISHAN SHUKLANessuna valutazione finora
- CA3102Documento11 pagineCA3102bonaparteCWBNessuna valutazione finora
- Ece 3-2 Cs Syllabus - Ug - r20Documento113 pagineEce 3-2 Cs Syllabus - Ug - r20Jøhn WeßłeyNessuna valutazione finora
- Li-Fi Project Report SummaryDocumento34 pagineLi-Fi Project Report SummaryRoshan SuvarnaNessuna valutazione finora
- Dual 15A/Single 30A Step-Down Power Module: ISL8225MDocumento34 pagineDual 15A/Single 30A Step-Down Power Module: ISL8225MAnonymous QakmLc3kTINessuna valutazione finora
- Op Amp Guide Covers Ideal Behavior, CircuitsDocumento16 pagineOp Amp Guide Covers Ideal Behavior, CircuitsscribsunilNessuna valutazione finora
- EC3353 SyllabusDocumento1 paginaEC3353 SyllabusSarika AyyathuraiNessuna valutazione finora
- Linear Integrated Circuits Unit1 Raghudathesh VTUDocumento54 pagineLinear Integrated Circuits Unit1 Raghudathesh VTUraghudatheshNessuna valutazione finora
- Build Your Own Analog Soldering StationDocumento6 pagineBuild Your Own Analog Soldering StationRabahNessuna valutazione finora
- InstrumentationDocumento16 pagineInstrumentationilias ahmedNessuna valutazione finora
- Project Report On FM Transmitter AndreceiverDocumento35 pagineProject Report On FM Transmitter Andreceiverkuldeep Singh60% (5)
- Ijert Ijert: Simulation of Two Stage Operational Amplifier Using 250nm and 350nm TechnologyDocumento4 pagineIjert Ijert: Simulation of Two Stage Operational Amplifier Using 250nm and 350nm TechnologySYAMALANessuna valutazione finora
- Svce EC6404 QBDocumento11 pagineSvce EC6404 QBformyphdNessuna valutazione finora
- QSC PowerLight 9.0 Service ManualDocumento100 pagineQSC PowerLight 9.0 Service Manualjgerabm50% (2)
- David A BellDocumento24 pagineDavid A Belldivya k s50% (2)
- VLSI Lab Manual - 2022-1Documento54 pagineVLSI Lab Manual - 2022-1SuhailNessuna valutazione finora
- Eda ExamplesDocumento27 pagineEda ExamplesTamilinbaaNessuna valutazione finora
- Instrumentation Engineering Question Booklet Code ADocumento20 pagineInstrumentation Engineering Question Booklet Code AAjay AdithyaNessuna valutazione finora
- Opamp NotesDocumento5 pagineOpamp NotesVasim AkramNessuna valutazione finora
- Hall Effect SensorDocumento6 pagineHall Effect SensorDamith Buddhika Sri WimalarathnaNessuna valutazione finora
- "Electronics Assignment": Application of Op Amp"Documento18 pagine"Electronics Assignment": Application of Op Amp"Faseeha ShabbirNessuna valutazione finora
- EC - 601 - Question Bank of VLSI & Microelectronics - 2019 - AnsDocumento14 pagineEC - 601 - Question Bank of VLSI & Microelectronics - 2019 - AnsTanay ChakrabortyNessuna valutazione finora
- Electronic Devices and CircuitsDocumento4 pagineElectronic Devices and CircuitsSudalai MadanNessuna valutazione finora
- Basic Electronics (18ELN14/18ELN24) - Operational Amplifiers and Applications (Module 3)Documento46 pagineBasic Electronics (18ELN14/18ELN24) - Operational Amplifiers and Applications (Module 3)Shrishail BhatNessuna valutazione finora
- Unit 1 AmplifiersDocumento46 pagineUnit 1 Amplifiersvimalaspl7831Nessuna valutazione finora
- 19 Current ControlDocumento5 pagine19 Current ControlZeshan LatifNessuna valutazione finora
- Op-Amp ApplicationsDocumento64 pagineOp-Amp ApplicationsJadhav BhagavatNessuna valutazione finora
- Telescopic PDFDocumento8 pagineTelescopic PDFdemodemo321123Nessuna valutazione finora