Potrebbero piacerti anche
- VHDL PDFDocumento112 pagineVHDL PDFvivek patelNessuna valutazione finora
- Fpga Programming Using Verilog HDL LanguageDocumento89 pagineFpga Programming Using Verilog HDL LanguageSidhartha Sankar Rout0% (1)
- Zynq 7020Documento4 pagineZynq 7020NGUYỄN HOÀNG LINHNessuna valutazione finora
- VHDL BRAM and ROM ExamplesDocumento9 pagineVHDL BRAM and ROM ExamplesGmit MandyaNessuna valutazione finora
- VLSI Design - Verilog HDL IntroductionDocumento30 pagineVLSI Design - Verilog HDL Introductionanand_duraiswamyNessuna valutazione finora
- 1.FPGA Design Flow Processes PropertiesDocumento5 pagine1.FPGA Design Flow Processes Propertiesmachnik1486624Nessuna valutazione finora
- VHDL Coding Tips and TricksDocumento209 pagineVHDL Coding Tips and TricksvinutaNessuna valutazione finora
- RTL2GDSFLOWDocumento23 pagineRTL2GDSFLOWAbhishek Gupta0% (1)
- Study and Analysis of RTL Verification Tool IEEE ConferenceDocumento7 pagineStudy and Analysis of RTL Verification Tool IEEE ConferenceZC LNessuna valutazione finora
- Lec20 RTL DesignDocumento40 pagineLec20 RTL DesignVrushali patilNessuna valutazione finora
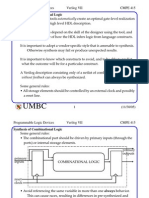
- Verilog VII Synthesis of Combinational LogicDocumento18 pagineVerilog VII Synthesis of Combinational Logicvortex2910_899547857Nessuna valutazione finora
- 03-Verilog Modules and Ports-MergedDocumento170 pagine03-Verilog Modules and Ports-MergedqwertyNessuna valutazione finora
- Mips Fpga LabDocumento10 pagineMips Fpga LabBiloKhanNessuna valutazione finora
- Clock Dividers Made EasyDocumento25 pagineClock Dividers Made Easykumarbsnsp100% (2)
- Nvme Pcie SSD M.2 ManualDocumento56 pagineNvme Pcie SSD M.2 ManualDummy BearNessuna valutazione finora
- BuchblockDocumento103 pagineBuchblockRafiqul IslamNessuna valutazione finora
- ASIC TimingDocumento54 pagineASIC TimingKrishna MohanNessuna valutazione finora
- Advanced Asic Chip SynthesisDocumento126 pagineAdvanced Asic Chip SynthesispravinNessuna valutazione finora
- Verilog Synthesis Guide for FPGA and ASIC DesignDocumento26 pagineVerilog Synthesis Guide for FPGA and ASIC Designksb9790Nessuna valutazione finora
- Vlsi Design AutomationDocumento31 pagineVlsi Design AutomationNischita KeerthiNessuna valutazione finora
- Lab 6 Introduction To VerilogDocumento7 pagineLab 6 Introduction To Verilogmmorsy1981Nessuna valutazione finora
- Lec4 VerilogDocumento58 pagineLec4 VerilogRohit BhelkarNessuna valutazione finora
- SynopsysDocumento20 pagineSynopsysbennettmatthewNessuna valutazione finora
- Online Examinations (Mid 2 - Vlsi)Documento24 pagineOnline Examinations (Mid 2 - Vlsi)Bestha HarishNessuna valutazione finora
- Ec1461 Vlsi DesignDocumento17 pagineEc1461 Vlsi DesignArunkumarNessuna valutazione finora
- Cadence Virtuoso Spectre - Virtuoso - MmsimDocumento12 pagineCadence Virtuoso Spectre - Virtuoso - MmsimParker333Nessuna valutazione finora
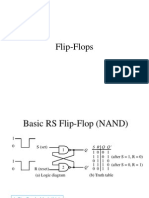
- Basic flip-flops and memory devicesDocumento25 pagineBasic flip-flops and memory devicesNagul MeeraNessuna valutazione finora
- Implementing A Source Synchronous Interface v2.0Documento47 pagineImplementing A Source Synchronous Interface v2.0Gautham PopuriNessuna valutazione finora
- SystemVerilog Vs Verilog in RTL DesignDocumento4 pagineSystemVerilog Vs Verilog in RTL DesignVijay KumarNessuna valutazione finora
- Study of VLSI Design Methodologies and Limitations Using CAD Tools For CMOS Technology PresentationDocumento26 pagineStudy of VLSI Design Methodologies and Limitations Using CAD Tools For CMOS Technology PresentationRoshdy AbdelRassoulNessuna valutazione finora
- Spyglass-Cdc: Industry Most Comprehensive, Practical, and Powerful CDC SolutionDocumento2 pagineSpyglass-Cdc: Industry Most Comprehensive, Practical, and Powerful CDC SolutionRamakrishnaRao SoogooriNessuna valutazione finora
- Design Rule Check: By:-Chandan ROLL NO. 15/914 B.SC (Hons.) ELECTRONICS ScienceDocumento9 pagineDesign Rule Check: By:-Chandan ROLL NO. 15/914 B.SC (Hons.) ELECTRONICS ScienceChandan KumarNessuna valutazione finora
- Digital Morse Code Decoder Design Lab 1Documento4 pagineDigital Morse Code Decoder Design Lab 1sharmanator99Nessuna valutazione finora
- System On Chip Architecture Design Lecture21Documento17 pagineSystem On Chip Architecture Design Lecture21Thi NguyenNessuna valutazione finora
- Top Down AsicDocumento17 pagineTop Down AsicKrishna M ViswanathNessuna valutazione finora
- AVMSVI-04 - Automating Testbench Tasks With TCLDocumento26 pagineAVMSVI-04 - Automating Testbench Tasks With TCLGurinder Pal SinghNessuna valutazione finora
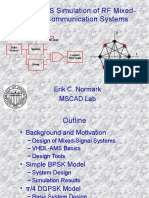
- Eric Thesis SlidesDocumento43 pagineEric Thesis SlidesHumberto JuniorNessuna valutazione finora
- ASIC Design Flow - SynopsysDocumento18 pagineASIC Design Flow - SynopsysDavid CheNessuna valutazione finora
- Verilog ReviewDocumento78 pagineVerilog ReviewsubbuNessuna valutazione finora
- Designing Memory Array Subsystems CH 12 PDFDocumento87 pagineDesigning Memory Array Subsystems CH 12 PDFrao rehNessuna valutazione finora
- Lecture 1 - Introduction: Arto Perttula TIE-50206 Logic Synthesis Tampere University of Technology 2017-2018Documento57 pagineLecture 1 - Introduction: Arto Perttula TIE-50206 Logic Synthesis Tampere University of Technology 2017-2018antoniocljNessuna valutazione finora
- Formal Verification Methods: SAT, BDDs, Model Checking & Equivalence CheckingDocumento52 pagineFormal Verification Methods: SAT, BDDs, Model Checking & Equivalence CheckingNavathej BangariNessuna valutazione finora
- Cadence Uv M Debug SlidesDocumento34 pagineCadence Uv M Debug SlidesBharathwajan ParthasarathyNessuna valutazione finora
- Digital QuestionsDocumento3 pagineDigital QuestionsCLARITY UDTNessuna valutazione finora
- Asic DesignDocumento59 pagineAsic DesignManjunath ReddyNessuna valutazione finora
- Design of VLSI Architecture For A Flexible Testbed of Artificial Neural Network For Training and Testing On FPGADocumento7 pagineDesign of VLSI Architecture For A Flexible Testbed of Artificial Neural Network For Training and Testing On FPGAInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- AXI Implementation On SoCDocumento5 pagineAXI Implementation On SoCvijaykumarn12Nessuna valutazione finora
- Lib Char CT SeminarDocumento75 pagineLib Char CT Seminaradnan.tamimNessuna valutazione finora
- 05 Systemc TutorialDocumento32 pagine05 Systemc TutorialjasonturfNessuna valutazione finora
- Interfacing and Some Common Building Blocks: Coe 111: Advanced Digital DesignDocumento35 pagineInterfacing and Some Common Building Blocks: Coe 111: Advanced Digital DesignFrancisNessuna valutazione finora
- Cadence Spectre Matlab ToolboxDocumento11 pagineCadence Spectre Matlab Toolboxabhi_nxp0% (1)
- FPGA System Design Course OverviewDocumento30 pagineFPGA System Design Course OverviewKrishna Kumar100% (1)
- Signal and Design Integrity IssuesDocumento56 pagineSignal and Design Integrity IssuesJyothi Nath100% (1)
- NC Sim To Innovus FlowDocumento52 pagineNC Sim To Innovus FlowSanthoshReddyNessuna valutazione finora
- Lec 15 Multi VDDDocumento17 pagineLec 15 Multi VDDvpsampathNessuna valutazione finora
- Project Report - Retreading IndustryDocumento38 pagineProject Report - Retreading Industrypusd_90Nessuna valutazione finora
- Level Guide enDocumento16 pagineLevel Guide enHala AhmedNessuna valutazione finora
- Quizzes & Mid TermsDocumento17 pagineQuizzes & Mid Termspusd_90Nessuna valutazione finora
- Level Selection GuideDocumento1 paginaLevel Selection Guidepusd_90Nessuna valutazione finora
- Financial Planning For Young Investors by SEBIDocumento37 pagineFinancial Planning For Young Investors by SEBIAbhinav JunejaNessuna valutazione finora
- McKinsey Website CasestudyDocumento7 pagineMcKinsey Website Casestudypusd_90Nessuna valutazione finora
- In October It Began - A Love StoryDocumento2 pagineIn October It Began - A Love Storypusd_90Nessuna valutazione finora
- Op Amp Circuit Collection - National SemiconductorDocumento33 pagineOp Amp Circuit Collection - National Semiconductorkok6Nessuna valutazione finora
- NTPC Training ReportDocumento49 pagineNTPC Training Reportpusd_90100% (1)
- D.V.S. MurthyDocumento14 pagineD.V.S. Murthypusd_90Nessuna valutazione finora
- MOTOROLA CP-02 GSM HandbookDocumento344 pagineMOTOROLA CP-02 GSM Handbookpusd_90Nessuna valutazione finora
- D.V.S. MurthyDocumento14 pagineD.V.S. Murthypusd_9040% (5)
- GlaucomaDocumento23 pagineGlaucomasanjivdas100% (2)
- Literature Study of HospitalDocumento18 pagineLiterature Study of HospitalJasleen KaurNessuna valutazione finora
- KK Apuntes Sap 01Documento3 pagineKK Apuntes Sap 01Smith F. JohnNessuna valutazione finora
- Cumene-to-phenol process & future production of phenolDocumento2 pagineCumene-to-phenol process & future production of phenolChaiwatTippuwanan100% (2)
- Chapter 10 Meiosis and Sexual Reproduction: Multiple Choice QuestionsDocumento12 pagineChapter 10 Meiosis and Sexual Reproduction: Multiple Choice Questionsquiet19Nessuna valutazione finora
- Subject Centered - Correlational DesignDocumento13 pagineSubject Centered - Correlational DesignWarrenBualoySayagoNessuna valutazione finora
- CSC 2209 NotesDocumento102 pagineCSC 2209 NotesWilliam manzhi KajjubiNessuna valutazione finora
- FDA AssignDocumento9 pagineFDA AssignZhainna SilvestreNessuna valutazione finora
- Schedule A Deliverables For GPDS 3 0Documento80 pagineSchedule A Deliverables For GPDS 3 0MAYTE1085Nessuna valutazione finora
- 05 Allama Ibn e Nujaim or Un Ki Kitab PDFDocumento20 pagine05 Allama Ibn e Nujaim or Un Ki Kitab PDFFk imaginaryNessuna valutazione finora
- Week 17 PDFDocumento23 pagineWeek 17 PDFGerlie V. ArribaNessuna valutazione finora
- SC upholds conviction of accused who pleaded guilty to kidnapping and murderDocumento3 pagineSC upholds conviction of accused who pleaded guilty to kidnapping and murderTelle MarieNessuna valutazione finora
- Evidence DisputeDocumento10 pagineEvidence DisputeAlexPamintuanAbitanNessuna valutazione finora
- Prostate Cancer Targeted Gold Nanoparticles for Imaging-Guided TherapyDocumento25 pagineProstate Cancer Targeted Gold Nanoparticles for Imaging-Guided Therapypath gamingNessuna valutazione finora
- ART Appropriation FINAL EXAM NOTESDocumento3 pagineART Appropriation FINAL EXAM NOTESKate NalanganNessuna valutazione finora
- Javafx NotesDocumento21 pagineJavafx NotesMajd A-HNessuna valutazione finora
- Artificial Intelligence A Modern Approach 3rd Edition Russell Solutions ManualDocumento36 pagineArtificial Intelligence A Modern Approach 3rd Edition Russell Solutions Manualsurnameballistah9g4ce100% (27)
- Gondar University 2022/23 Academic CalendarDocumento8 pagineGondar University 2022/23 Academic CalendarFasil KebedeNessuna valutazione finora
- 06 - SS - 09082021 To 20082021 Bridge, SR - DEnDocumento52 pagine06 - SS - 09082021 To 20082021 Bridge, SR - DEnAl OkNessuna valutazione finora
- BCM Nano Materials PDFDocumento1 paginaBCM Nano Materials PDFruchira prathyushaNessuna valutazione finora
- Adjective Clause Sentences SECOND 40Documento2 pagineAdjective Clause Sentences SECOND 40sumiyaNessuna valutazione finora
- Erin Alles BipDocumento39 pagineErin Alles Bipapi-270220688Nessuna valutazione finora
- Nature-Based+tourism+and+biodiversity+conservation+in+protected+areas +philippine+contextDocumento17 pagineNature-Based+tourism+and+biodiversity+conservation+in+protected+areas +philippine+contextRene John Bulalaque EscalNessuna valutazione finora
- Katalog Optibelt Remenice PDFDocumento128 pagineKatalog Optibelt Remenice PDFluky ivanNessuna valutazione finora
- Contractor Classification PDFDocumento4 pagineContractor Classification PDFKendrick RickNessuna valutazione finora
- Culvert Base Slabs: Slabs For Rectangular Portal Culvert Slabs For SATS Rectangular Portal CulvertDocumento1 paginaCulvert Base Slabs: Slabs For Rectangular Portal Culvert Slabs For SATS Rectangular Portal CulvertEphraim BarezNessuna valutazione finora
- Mints in India PDFDocumento25 pagineMints in India PDFalamgirianNessuna valutazione finora
- Network Analysis in PERT & CPMDocumento4 pagineNetwork Analysis in PERT & CPMAsmita MoonNessuna valutazione finora
- Verbos RegularesDocumento11 pagineVerbos RegularesdinanarvaezNessuna valutazione finora
- Illustrator Day3 handout-NEWDocumento4 pagineIllustrator Day3 handout-NEWmarkanthonynonescoNessuna valutazione finora
- Imagery in Spenser's Amoretti PDFDocumento16 pagineImagery in Spenser's Amoretti PDFIms AliNessuna valutazione finora