Potrebbero piacerti anche
- 1-Digital Filters (FIR)Documento43 pagine1-Digital Filters (FIR)neyazNessuna valutazione finora
- Newnes Radio and Electronics Engineer's Pocket BookDa EverandNewnes Radio and Electronics Engineer's Pocket BookNessuna valutazione finora
- 2-Digital Filters (IIR)Documento28 pagine2-Digital Filters (IIR)Sha Tu BolaNessuna valutazione finora
- 2-Digital Filters (IIR)Documento28 pagine2-Digital Filters (IIR)Sudhanshu ShekharNessuna valutazione finora
- Fir FiltersDocumento43 pagineFir FiltersAmeerulla ShaikNessuna valutazione finora
- Acoustic Echo Canceller: Professor A G Constantinides©Documento16 pagineAcoustic Echo Canceller: Professor A G Constantinides©Ayat AtharNessuna valutazione finora
- Combinatorial Algorithms: For Computers and CalculatorsDa EverandCombinatorial Algorithms: For Computers and CalculatorsValutazione: 4 su 5 stelle4/5 (2)
- Digital Filter SpecificationsDocumento43 pagineDigital Filter SpecificationsAshish ChoudharyNessuna valutazione finora
- Sensitivity of A Controlled System: S S G S K K S G L(S) GDocumento3 pagineSensitivity of A Controlled System: S S G S K K S G L(S) GroseNessuna valutazione finora
- Acoustic Echo Canceller: AGC DSPDocumento16 pagineAcoustic Echo Canceller: AGC DSPAyat AtharNessuna valutazione finora
- Part 7.1Documento10 paginePart 7.1Pavamana GiribhattanavarNessuna valutazione finora
- FIR and IIR Filter Design & FIR and IIR Filter Design & Implementation Structures PDocumento53 pagineFIR and IIR Filter Design & FIR and IIR Filter Design & Implementation Structures PSandeep KumarNessuna valutazione finora
- Chapter 7Documento46 pagineChapter 7nctgayarangaNessuna valutazione finora
- AB - IIR Filter Design2Documento44 pagineAB - IIR Filter Design2Sha Tu BolaNessuna valutazione finora
- Matlab chp7Documento60 pagineMatlab chp7belacheweshetu222Nessuna valutazione finora
- Digital Signal ProcessingDocumento24 pagineDigital Signal ProcessingantrikshNessuna valutazione finora
- Digital Filters (IIR)Documento28 pagineDigital Filters (IIR)Sujatanu0% (1)
- LESSON - 1 - Introduction To Signals Spectra and Signal ProcessingDocumento24 pagineLESSON - 1 - Introduction To Signals Spectra and Signal ProcessingVicente Alberm F. Cruz-AmNessuna valutazione finora
- IIR Digital Filter Design: Standard ApproachDocumento27 pagineIIR Digital Filter Design: Standard ApproachAshok GadhwalNessuna valutazione finora
- Chapter 6 Part 1 - HandoutDocumento24 pagineChapter 6 Part 1 - Handoutmeseret sisayNessuna valutazione finora
- Ch9 - IIR Digital Filter DesignDocumento78 pagineCh9 - IIR Digital Filter Designkamal100% (2)
- Digital Signal Processing & Digital FiltersDocumento26 pagineDigital Signal Processing & Digital FiltersasdzNessuna valutazione finora
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Documento9 pagineEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamedNessuna valutazione finora
- Digital Filter DesignDocumento0 pagineDigital Filter DesignTechy GuyNessuna valutazione finora
- CH 1Documento24 pagineCH 1chuhpsdustinNessuna valutazione finora
- Digital Filter DesignDocumento102 pagineDigital Filter Designjaun danielNessuna valutazione finora
- Cell: 9952749533 WWW - Researchprojects.infoDocumento55 pagineCell: 9952749533 WWW - Researchprojects.infosetsindia3735Nessuna valutazione finora
- AB - IIR Filter DesignDocumento60 pagineAB - IIR Filter DesignSha Tu BolaNessuna valutazione finora
- DSP 5Documento5 pagineDSP 5Arik JuniarNessuna valutazione finora
- Analog To Digital Converters: Nyquist-Rate AdcsDocumento42 pagineAnalog To Digital Converters: Nyquist-Rate AdcsPahala SamosirNessuna valutazione finora
- Chapter 2Documento31 pagineChapter 2pavanikaveesha9562Nessuna valutazione finora
- Part A: IIR Digital Filter Design Preliminary ConsiderationsDocumento4 paginePart A: IIR Digital Filter Design Preliminary ConsiderationsAnonymous PkeI8e84RsNessuna valutazione finora
- Gps Signal Structure: Imasig-1Documento13 pagineGps Signal Structure: Imasig-1soumya_cuNessuna valutazione finora
- 87 10217 Revk At3553 At3554 AnalogbroadcasttxDocumento4 pagine87 10217 Revk At3553 At3554 Analogbroadcasttxjames wrightNessuna valutazione finora
- Sine Output DDSs A Survey of The State of The ArtDocumento9 pagineSine Output DDSs A Survey of The State of The ArtTiagoNessuna valutazione finora
- Mitra-Ch9 3ed PDFDocumento7 pagineMitra-Ch9 3ed PDFDebajyoti DattaNessuna valutazione finora
- ENTC 3320: Active FiltersDocumento60 pagineENTC 3320: Active FiltersMichael DineshNessuna valutazione finora
- Bandpass Project PDFDocumento13 pagineBandpass Project PDFarjun aluNessuna valutazione finora
- 3-Discrete Cosine Transform PDFDocumento87 pagine3-Discrete Cosine Transform PDFHiteshNessuna valutazione finora
- Sbas844 PDFDocumento127 pagineSbas844 PDFziegatiNessuna valutazione finora
- 2m BP Filter-Yu1lmDocumento5 pagine2m BP Filter-Yu1lmKovalski AndersonNessuna valutazione finora
- 2m BP Filter-Yu1lmDocumento5 pagine2m BP Filter-Yu1lmshubhamformeNessuna valutazione finora
- 2m BP FILTER-YU1LM PDFDocumento5 pagine2m BP FILTER-YU1LM PDFTEfromNessuna valutazione finora
- 2m BP FILTER-YU1LM PDFDocumento5 pagine2m BP FILTER-YU1LM PDFBoban JovanovicNessuna valutazione finora
- Iir 2Documento17 pagineIir 2Belachew AyaliewNessuna valutazione finora
- Decimation Filtering For Complex Sigma Delta Analog To Digital Conversion in A Low-IF ReceiverDocumento48 pagineDecimation Filtering For Complex Sigma Delta Analog To Digital Conversion in A Low-IF ReceiverSimyon PinskyNessuna valutazione finora
- ET3005 Bab 8 Sem I 1718 MhsDocumento44 pagineET3005 Bab 8 Sem I 1718 MhsNoval Khadafi OktaviansyahNessuna valutazione finora
- Summary of Path Loss in PropagationDocumento12 pagineSummary of Path Loss in PropagationromarcambriNessuna valutazione finora
- Electronics: 10-Ghz Fully Di Biquad Filters in 55Nm Sige Bicmos TechnologyDocumento14 pagineElectronics: 10-Ghz Fully Di Biquad Filters in 55Nm Sige Bicmos Technologyjesus barrionuevoNessuna valutazione finora
- Ads 1256Documento43 pagineAds 1256yaser2005100% (2)
- DSP in RF ApplicationsDocumento34 pagineDSP in RF ApplicationsP ManiNessuna valutazione finora
- Designing Microstrip Bandpass Filter at 3.2 GHZDocumento14 pagineDesigning Microstrip Bandpass Filter at 3.2 GHZyyryNessuna valutazione finora
- Pres en at IonDocumento95 paginePres en at IonTapan ShahNessuna valutazione finora
- Atlced5 2018Documento62 pagineAtlced5 2018Matheus BordinNessuna valutazione finora
- Control System Design by Using Frequency Response ApproachDocumento73 pagineControl System Design by Using Frequency Response ApproachDipti GuptaNessuna valutazione finora
- Ecr305 L11Documento33 pagineEcr305 L11Shirazim MunirNessuna valutazione finora
- Else" Control Statement .: AIM:WAP To Enter A Day Number and Display Day Name Using "Nested IfDocumento2 pagineElse" Control Statement .: AIM:WAP To Enter A Day Number and Display Day Name Using "Nested Ifsanjeev553Nessuna valutazione finora
- Outline - Basic Semiconductor Physics: - Semiconductors - Intrinsic (Undoped) Silicon - Doping - Carrier ConcentrationsDocumento13 pagineOutline - Basic Semiconductor Physics: - Semiconductors - Intrinsic (Undoped) Silicon - Doping - Carrier Concentrationssanjeev553Nessuna valutazione finora
- Introduction To ElectronicsDocumento23 pagineIntroduction To Electronicssanjeev553Nessuna valutazione finora
- Static and Dynamic Characteristics of InstrumentsDocumento18 pagineStatic and Dynamic Characteristics of Instrumentsfaizan5001100% (1)
- Amrita Gita - Swami SivanandaDocumento21 pagineAmrita Gita - Swami Sivanandaamarsingh1001Nessuna valutazione finora
- Chsle-2014 Notice eDocumento37 pagineChsle-2014 Notice esandeepNessuna valutazione finora
- Here Is List of Project Ideas Based On MATLABDocumento27 pagineHere Is List of Project Ideas Based On MATLABsanjeev553Nessuna valutazione finora
- (Ebook - PDF - Electronics) Antenna Circuit Design For RFID Applications (Lee 2003) PDFDocumento50 pagine(Ebook - PDF - Electronics) Antenna Circuit Design For RFID Applications (Lee 2003) PDFmoomoerNessuna valutazione finora
- Railway Recruitment Board (RRB) NotificationDocumento16 pagineRailway Recruitment Board (RRB) NotificationFreshers Plane India100% (2)
- M.tech Ece Syllabus PtuDocumento26 pagineM.tech Ece Syllabus PtufreakyloggerNessuna valutazione finora
- 2 - Transformers - FIDPDocumento12 pagine2 - Transformers - FIDPLoumarie C. ZepedaNessuna valutazione finora
- IBR DetailsDocumento10 pagineIBR Detailsreach_arindomNessuna valutazione finora
- Celcon ShortTermPropertiesDocumento12 pagineCelcon ShortTermPropertiesYokeshAnandNessuna valutazione finora
- Alibaba Retail TechnologyDocumento28 pagineAlibaba Retail TechnologyHomer SimpNessuna valutazione finora
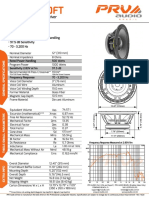
- PRV Audio 12MB1000FT DatasheetDocumento1 paginaPRV Audio 12MB1000FT DatasheetGilberto MontaniNessuna valutazione finora
- Accent P0012 Camshaft Position-Timing Over-Retarded (Bank 1)Documento5 pagineAccent P0012 Camshaft Position-Timing Over-Retarded (Bank 1)flash_24014910Nessuna valutazione finora
- Motherboard Flow Chart TroubleshootingDocumento1 paginaMotherboard Flow Chart TroubleshootingKubeta AkihiroNessuna valutazione finora
- Assignment 2Documento8 pagineAssignment 2Ador AkoiNessuna valutazione finora
- Chapter 3 Boolean Functions and K-MapDocumento52 pagineChapter 3 Boolean Functions and K-MapAmita PalNessuna valutazione finora
- CZT Technology White Paper1Documento6 pagineCZT Technology White Paper1Ozz OzieNessuna valutazione finora
- Material Handling and Material Storage SystemDocumento56 pagineMaterial Handling and Material Storage SystemRishi vardhiniNessuna valutazione finora
- Gas Measuring and Alarm Systems: Exdetector Hc-100Documento7 pagineGas Measuring and Alarm Systems: Exdetector Hc-100joseNessuna valutazione finora
- BSBLDR601 Project PortfolioDocumento11 pagineBSBLDR601 Project PortfolioBhanu AUGMENT0% (2)
- MyPhp MaterialsDocumento233 pagineMyPhp MaterialsJai DanyaNessuna valutazione finora
- 5 Complaint Brgy. Ibabang Taykin, Liliw LagunaDocumento5 pagine5 Complaint Brgy. Ibabang Taykin, Liliw LagunaDante Arcigal JrNessuna valutazione finora
- Digital SLR Photography Solutions, From PC Magazine - 89Documento419 pagineDigital SLR Photography Solutions, From PC Magazine - 89adi22-22Nessuna valutazione finora
- D73244GC20 SGDocumento316 pagineD73244GC20 SGDjebrani AzizNessuna valutazione finora
- LED Matrix Display Project ReportDocumento81 pagineLED Matrix Display Project ReportAmar Shrestha81% (16)
- CTX-10 User's Manual FINAL Less Block Diagram Rev H 1-18-2021Documento48 pagineCTX-10 User's Manual FINAL Less Block Diagram Rev H 1-18-2021Bob MartinNessuna valutazione finora
- Focus Group Research PDFDocumento5 pagineFocus Group Research PDFAlexandra TurcuNessuna valutazione finora
- Asymmetric Cryptography:: Generating Private KeyDocumento4 pagineAsymmetric Cryptography:: Generating Private KeyGaurav SrivastavNessuna valutazione finora
- ILE Concepts (For The Impatient RPG Programmer)Documento21 pagineILE Concepts (For The Impatient RPG Programmer)Reynold GalamitonNessuna valutazione finora
- Esquema Electrico 324 DFMDocumento28 pagineEsquema Electrico 324 DFMHeidi Cuevas Venegas100% (1)
- Super Simple Cryptocurrency ArbitrageDocumento64 pagineSuper Simple Cryptocurrency ArbitrageZahirabbas Bhimani100% (1)
- Engineering Management Masters Thesis TopicsDocumento5 pagineEngineering Management Masters Thesis Topicsgbtrjrap100% (2)
- Online Admission SystemDocumento39 pagineOnline Admission SystemBirjoy Basumatary100% (1)
- Saf 7113 HTDocumento80 pagineSaf 7113 HTgheo23Nessuna valutazione finora
- Ciclo Di Verniciatura: Technical PropertiesDocumento1 paginaCiclo Di Verniciatura: Technical PropertiesMaffone NumerounoNessuna valutazione finora
- IP Project Class 12th AnupriyaDocumento22 pagineIP Project Class 12th Anupriyaanu870906Nessuna valutazione finora
- Benchmark H4000 Hotplate Stirrer Instruction ManualDocumento1 paginaBenchmark H4000 Hotplate Stirrer Instruction ManualKenneth SaganNessuna valutazione finora