Potrebbero piacerti anche
- ENT 300 Individual Assessment-Personal Entrepreneurial CompetenciesDocumento8 pagineENT 300 Individual Assessment-Personal Entrepreneurial CompetenciesAbu Ammar Al-hakimNessuna valutazione finora
- MEC-E5004 Fluid Power Systems: Report On Servo System 2 NameDocumento16 pagineMEC-E5004 Fluid Power Systems: Report On Servo System 2 NameAshish NegiNessuna valutazione finora
- CICC09 Slides19.3 PLL Loop Measurement PDFDocumento23 pagineCICC09 Slides19.3 PLL Loop Measurement PDFgumptionsNessuna valutazione finora
- %ambiente de La Place Tos: S TF A1 2.5 A2 2.5 Ro 4 R1 8 R2 4 E 1015 Ti 11.55 G 0.67/ (Ti 2 S 2+2 E Ti s+1)Documento2 pagine%ambiente de La Place Tos: S TF A1 2.5 A2 2.5 Ro 4 R1 8 R2 4 E 1015 Ti 11.55 G 0.67/ (Ti 2 S 2+2 E Ti s+1)Nelson Mamani LeonNessuna valutazione finora
- Sesimic Method PDFDocumento18 pagineSesimic Method PDFMohamad Tayea100% (1)
- Experiment - 3 Periodic and Aperiodic SignalsDocumento5 pagineExperiment - 3 Periodic and Aperiodic SignalsdfbbvcxNessuna valutazione finora
- Cycle - II ExperimentsDocumento26 pagineCycle - II ExperimentsEr. ShajuNessuna valutazione finora
- Lecture 23Documento2 pagineLecture 23api-3702538Nessuna valutazione finora
- ME451: Control Systems Course RoadmapDocumento6 pagineME451: Control Systems Course RoadmapVu NghiaNessuna valutazione finora
- ME451 L15 Timeresp2nd 240116 183552Documento6 pagineME451 L15 Timeresp2nd 240116 183552epe3630Nessuna valutazione finora
- Week 5 - LecturesDocumento79 pagineWeek 5 - LecturesSanjid ElahiNessuna valutazione finora
- Mechanical Measurements - 2Documento14 pagineMechanical Measurements - 2فضائح لا تصدقNessuna valutazione finora
- Presentation: Classical ControlDocumento10 paginePresentation: Classical Controlİbrahim KayğanNessuna valutazione finora
- Figure Tp1sal - CopieDocumento4 pagineFigure Tp1sal - CopieAudrey YagueNessuna valutazione finora
- Tripoli University Department of Electrical & Electronic EngineeringDocumento44 pagineTripoli University Department of Electrical & Electronic EngineeringtojogofirNessuna valutazione finora
- First Order SystemsDocumento158 pagineFirst Order SystemsGathy BrayohNessuna valutazione finora
- Grafik KinrekDocumento3 pagineGrafik KinrekfauziNessuna valutazione finora
- Time ResponseDocumento84 pagineTime ResponseDhyan PatelNessuna valutazione finora
- Iqpump Controller: User ManualDocumento266 pagineIqpump Controller: User ManualLuis Fernando Gomez SalasNessuna valutazione finora
- Ii Parcial - Control: Bode Diagram (G1)Documento5 pagineIi Parcial - Control: Bode Diagram (G1)ramiro doradoNessuna valutazione finora
- 1-Design AspectsDocumento37 pagine1-Design AspectsUmar IftikharNessuna valutazione finora
- Model Predictive Control For Integrating Processes: Lou Heavner - Consultant, APCDocumento23 pagineModel Predictive Control For Integrating Processes: Lou Heavner - Consultant, APCsamim_khNessuna valutazione finora
- Nyquist PlotsDocumento10 pagineNyquist PlotsUmy KalsoomNessuna valutazione finora
- Nyquist PlotsDocumento10 pagineNyquist PlotsUmy KalsoomNessuna valutazione finora
- 1 S 62.305 s+1.59 Transfer FCN Sin Trigonometric FunctionDocumento1 pagina1 S 62.305 s+1.59 Transfer FCN Sin Trigonometric FunctionGaurvi AroraNessuna valutazione finora
- Time Response, ME451: Instructor: Jongeun ChoiDocumento84 pagineTime Response, ME451: Instructor: Jongeun ChoiJpradha KamalNessuna valutazione finora
- Aritra MTPDocumento39 pagineAritra MTPsohamNessuna valutazione finora
- University of Southampton Research Repository Eprints SotonDocumento48 pagineUniversity of Southampton Research Repository Eprints SotonreenaNessuna valutazione finora
- Informe #3: Margen de Ganancia Y Margen de Fase: Nombre: Zahaira Oblitas CODIGO: 13190113Documento5 pagineInforme #3: Margen de Ganancia Y Margen de Fase: Nombre: Zahaira Oblitas CODIGO: 13190113alexNessuna valutazione finora
- System:: 500 KV Switchyard Sidi-Krir Over Head Transmission LineDocumento4 pagineSystem:: 500 KV Switchyard Sidi-Krir Over Head Transmission Linepowernet22Nessuna valutazione finora
- Discussion: Table 20: PID Parameter With Best Overall Performance in Ziegler-Nichols MethodDocumento3 pagineDiscussion: Table 20: PID Parameter With Best Overall Performance in Ziegler-Nichols MethodSingAnnNessuna valutazione finora
- Argus 02Documento4 pagineArgus 02Subramaniam NPNessuna valutazione finora
- MXT Unit 4Documento16 pagineMXT Unit 4ojas.s.dixitNessuna valutazione finora
- (A) FCFS:: Solution: T .A.T Copletion Time-Arrival TimeDocumento4 pagine(A) FCFS:: Solution: T .A.T Copletion Time-Arrival TimePawan MishraNessuna valutazione finora
- IEEE 1115 Battery Sizing ExampleDocumento4 pagineIEEE 1115 Battery Sizing ExampleMohd Waseem Khan100% (1)
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Documento13 paginePR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNessuna valutazione finora
- Process Control: Cement Process Engineering Vade-MecumDocumento9 pagineProcess Control: Cement Process Engineering Vade-MecumHasnaoui SamirNessuna valutazione finora
- Vector PrintoutsDocumento1 paginaVector Printoutsbarak_tzoriNessuna valutazione finora
- VIBRASI SE 3 Level2Documento133 pagineVIBRASI SE 3 Level2karimNessuna valutazione finora
- Phys-270 Homework 1 SolutionsDocumento6 paginePhys-270 Homework 1 SolutionsShaidul IkramNessuna valutazione finora
- 1.3/le Schéma Fonctionnel: T To Workspace1Documento1 pagina1.3/le Schéma Fonctionnel: T To Workspace1mondherNessuna valutazione finora
- Lecture7 MOS TP AndPDocumento15 pagineLecture7 MOS TP AndPxyzabcutubeNessuna valutazione finora
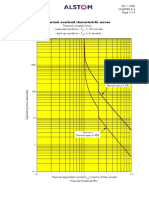
- TG 1.1552 Chap5-4Documento14 pagineTG 1.1552 Chap5-4GIRINessuna valutazione finora
- Setting VCB 250 AmpDocumento5 pagineSetting VCB 250 AmpAUGUSTA WIBI ARDIKTANessuna valutazione finora
- Online Control Lecture #3Documento17 pagineOnline Control Lecture #3Noor GamingNessuna valutazione finora
- Setting VCB 200 AmpDocumento5 pagineSetting VCB 200 AmpAUGUSTA WIBI ARDIKTANessuna valutazione finora
- ESC201T L13 Sinusoidal Analysis PhasorsDocumento29 pagineESC201T L13 Sinusoidal Analysis PhasorsRachit MahajanNessuna valutazione finora
- Series 1 Series 2Documento9 pagineSeries 1 Series 2Abhi MittalNessuna valutazione finora
- SPAM 150C Operation IndicatorsDocumento4 pagineSPAM 150C Operation IndicatorsrekhadvvNessuna valutazione finora
- Settling Time (2%) Criterion - Time Consumed in Exponential Decay Up To 98% of The InputDocumento20 pagineSettling Time (2%) Criterion - Time Consumed in Exponential Decay Up To 98% of The InputNoor NoorNessuna valutazione finora
- Online Control Lecture 3Documento17 pagineOnline Control Lecture 3Amylia NatashaNessuna valutazione finora
- MEH-Nakai Lab-1Documento93 pagineMEH-Nakai Lab-1rejuanulhuqNessuna valutazione finora
- Battery (New) Run Time CalculatorDocumento7 pagineBattery (New) Run Time CalculatorJose Mata RamcharanNessuna valutazione finora
- Location: Station - 07 / 3 Feeder Name 2. Name Plate DetailsDocumento2 pagineLocation: Station - 07 / 3 Feeder Name 2. Name Plate DetailsSubramaniam NPNessuna valutazione finora
- Use Cases 61850-90-5Documento2 pagineUse Cases 61850-90-5Alejandro B.Nessuna valutazione finora
- Introduction To Control System DesignDocumento63 pagineIntroduction To Control System DesignisbetaaccountNessuna valutazione finora
- Kinetika Weber-Morris 120 PPMDocumento3 pagineKinetika Weber-Morris 120 PPMWine FebriantiNessuna valutazione finora
- Time Delay Work Shop - 6Documento5 pagineTime Delay Work Shop - 6YTK96Nessuna valutazione finora
- Numerical Delta-I Protection Relay - Anpd 112 (An Series) : Customer TSS Serial No Date Test DetailsDocumento1 paginaNumerical Delta-I Protection Relay - Anpd 112 (An Series) : Customer TSS Serial No Date Test DetailsRCC PGTNessuna valutazione finora
- Assembly-Line Balancing: A Valuable Tool For Increasing EfficiencyDocumento20 pagineAssembly-Line Balancing: A Valuable Tool For Increasing Efficiencyaqsa imranNessuna valutazione finora
- Cheat Sheet Right For YouDocumento2 pagineCheat Sheet Right For YouAshish NegiNessuna valutazione finora
- Free Nonfiction Articles For Kids: TweentribuneDocumento4 pagineFree Nonfiction Articles For Kids: TweentribuneAshish NegiNessuna valutazione finora
- Containerwest: Interior Length 475"Documento2 pagineContainerwest: Interior Length 475"Ashish NegiNessuna valutazione finora
- Simscapefluids - Lib (Command) Hydraulics (Isothermal) : Simulink Library Browser Foundation LibraryDocumento1 paginaSimscapefluids - Lib (Command) Hydraulics (Isothermal) : Simulink Library Browser Foundation LibraryAshish NegiNessuna valutazione finora
- Simscapefluids - Lib (Command) Hydraulics (Isothermal) : Simulink Library Browser Foundation LibraryDocumento1 paginaSimscapefluids - Lib (Command) Hydraulics (Isothermal) : Simulink Library Browser Foundation LibraryAshish NegiNessuna valutazione finora
- Artemis E-Dyn® 96 Digital Displacement® Hydraulic Pump: EfficiencyDocumento3 pagineArtemis E-Dyn® 96 Digital Displacement® Hydraulic Pump: EfficiencyAshish NegiNessuna valutazione finora
- ParentsDocumento2 pagineParentsAshish NegiNessuna valutazione finora
- Simscapefluids - Lib (Command) Hydraulics (Isothermal) : Simulink Library Browser Foundation LibraryDocumento1 paginaSimscapefluids - Lib (Command) Hydraulics (Isothermal) : Simulink Library Browser Foundation LibraryAshish NegiNessuna valutazione finora
- Derebe TekesteDocumento75 pagineDerebe TekesteAbinet AdemaNessuna valutazione finora
- Project Formulation and Appraisalpdf PDFDocumento12 pagineProject Formulation and Appraisalpdf PDFabhijeet varadeNessuna valutazione finora
- Introduction To DifferentiationDocumento10 pagineIntroduction To DifferentiationaurennosNessuna valutazione finora
- Organization Culture Impacts On Employee Motivation: A Case Study On An Apparel Company in Sri LankaDocumento4 pagineOrganization Culture Impacts On Employee Motivation: A Case Study On An Apparel Company in Sri LankaSupreet PurohitNessuna valutazione finora
- Kapinga Kamwalye Conservancy ReleaseDocumento5 pagineKapinga Kamwalye Conservancy ReleaseRob ParkerNessuna valutazione finora
- Conservation Assignment 02Documento16 pagineConservation Assignment 02RAJU VENKATANessuna valutazione finora
- Advertising II Marathi VersionDocumento91 pagineAdvertising II Marathi VersionHarsh Sangani100% (1)
- Open Source NetworkingDocumento226 pagineOpen Source NetworkingyemenlinuxNessuna valutazione finora
- The Mane Reason - UNDERSTANDING CONSUMER BEHAVIOUR TOWARDS NATURAL HAIR PRODUCTS IN GHANADocumento68 pagineThe Mane Reason - UNDERSTANDING CONSUMER BEHAVIOUR TOWARDS NATURAL HAIR PRODUCTS IN GHANAYehowadah OddoyeNessuna valutazione finora
- Current Concepts in Elbow Fracture Dislocation: Adam C Watts, Jagwant Singh, Michael Elvey and Zaid HamoodiDocumento8 pagineCurrent Concepts in Elbow Fracture Dislocation: Adam C Watts, Jagwant Singh, Michael Elvey and Zaid HamoodiJoão Artur BonadimanNessuna valutazione finora
- Forex Day Trading SystemDocumento17 pagineForex Day Trading SystemSocial Malik100% (1)
- Item Analysis and Test BankingDocumento23 pagineItem Analysis and Test BankingElenita-lani Aguinaldo PastorNessuna valutazione finora
- Cetie Guide No1 EngDocumento55 pagineCetie Guide No1 EngJose Manuel Sepulveda RomanNessuna valutazione finora
- Blockchains: Architecture, Design and Use CasesDocumento26 pagineBlockchains: Architecture, Design and Use Caseseira kNessuna valutazione finora
- Chapter 4 - Basic ProbabilityDocumento37 pagineChapter 4 - Basic Probabilitynadya shafirahNessuna valutazione finora
- Roxas City For Revision Research 7 Q1 MELC 23 Week2Documento10 pagineRoxas City For Revision Research 7 Q1 MELC 23 Week2Rachele DolleteNessuna valutazione finora
- Artificial Intelligence Techniques For Encrypt Images Based On The Chaotic System Implemented On Field-Programmable Gate ArrayDocumento10 pagineArtificial Intelligence Techniques For Encrypt Images Based On The Chaotic System Implemented On Field-Programmable Gate ArrayIAES IJAINessuna valutazione finora
- Open Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaDocumento3 pagineOpen Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaProf. Prithvi Singh KandhalNessuna valutazione finora
- Data Asimilasi Untuk PemulaDocumento24 pagineData Asimilasi Untuk PemulaSii Olog-olog PlonkNessuna valutazione finora
- Wwii TictactoeDocumento2 pagineWwii Tictactoeapi-557780348Nessuna valutazione finora
- Dakua Makadre PresentationDocumento12 pagineDakua Makadre PresentationEli Briggs100% (1)
- Internship Report Format For Associate Degree ProgramDocumento5 pagineInternship Report Format For Associate Degree ProgramBisma AmjaidNessuna valutazione finora
- Walking in Space - Lyrics and Chord PatternDocumento2 pagineWalking in Space - Lyrics and Chord Patternjohn smithNessuna valutazione finora
- Steel Design Fourth Edition William T Segui Solution Manual 1Documento11 pagineSteel Design Fourth Edition William T Segui Solution Manual 1RazaNessuna valutazione finora
- Matka Queen Jaya BhagatDocumento1 paginaMatka Queen Jaya BhagatA.K.A. Haji100% (4)
- Union Test Prep Nclex Study GuideDocumento115 pagineUnion Test Prep Nclex Study GuideBradburn Nursing100% (2)
- DMIT - Midbrain - DMIT SoftwareDocumento16 pagineDMIT - Midbrain - DMIT SoftwarevinNessuna valutazione finora
- Modern School For SaxophoneDocumento23 pagineModern School For SaxophoneAllen Demiter65% (23)
- Frellwits Swedish Hosts FileDocumento10 pagineFrellwits Swedish Hosts FileAnonymous DsGzm0hQf5Nessuna valutazione finora