Potrebbero piacerti anche
- (Codientu - Org) - BD 9397Documento30 pagine(Codientu - Org) - BD 9397VươngNessuna valutazione finora
- PALCE16V8H 15 AdvancedMicroDevicesDocumento54 paginePALCE16V8H 15 AdvancedMicroDevicesMelek yılmazNessuna valutazione finora
- Application Note Atmel-46004-SE-M90E36A-DatasheetDocumento87 pagineApplication Note Atmel-46004-SE-M90E36A-DatasheetHafi UddinNessuna valutazione finora
- Oscilador Booster Led Sony BD9397EFVDocumento30 pagineOscilador Booster Led Sony BD9397EFVAntonio Chavez100% (1)
- Bd9397efv eDocumento30 pagineBd9397efv eGiovanni Carrillo VillegasNessuna valutazione finora
- 数字硬件简卡英文Documento11 pagine数字硬件简卡英文johanes kharismaNessuna valutazione finora
- SG3526Documento12 pagineSG3526pionalabzNessuna valutazione finora
- NCP45790 D-2317241Documento13 pagineNCP45790 D-2317241SuBaRu GTNessuna valutazione finora
- ISL6269 Data SheetDocumento14 pagineISL6269 Data SheetSummer SpringNessuna valutazione finora
- PWM Controller For ZVS Half Bridge: EaturesDocumento41 paginePWM Controller For ZVS Half Bridge: Eaturesalex castroNessuna valutazione finora
- ISO1500 3-kV Basic Isolated RS-485/RS-422 Transceiver in Ultra-Small PackageDocumento36 pagineISO1500 3-kV Basic Isolated RS-485/RS-422 Transceiver in Ultra-Small PackageSravan CholeteNessuna valutazione finora
- Ncp81205a DDocumento28 pagineNcp81205a DBlue Stacks100% (1)
- Sc900a PDFDocumento23 pagineSc900a PDFgoguNessuna valutazione finora
- Pic Mini WebDocumento15 paginePic Mini WebSizwe Martin ZithaNessuna valutazione finora
- AD9070Documento16 pagineAD9070RuslanNessuna valutazione finora
- ACS37800 DatasheetDocumento41 pagineACS37800 DatasheetSunil Kumar ThakurNessuna valutazione finora
- Logiq-A, B: Kittisak S. Grit DDocumento15 pagineLogiq-A, B: Kittisak S. Grit DSuryak1997Nessuna valutazione finora
- USB-C™ Port Controller: FeaturesDocumento2 pagineUSB-C™ Port Controller: FeaturesChau Nguyen MinhNessuna valutazione finora
- dade013c288c5d392d3ab556c1662be9Documento4 paginedade013c288c5d392d3ab556c1662be9Anung HaryantoNessuna valutazione finora
- DN 60185 PDF PDFDocumento4 pagineDN 60185 PDF PDFFendhik Budhi DhermawantoNessuna valutazione finora
- On Semiconductor Datasheet NCP360Documento10 pagineOn Semiconductor Datasheet NCP360Albert van BemmelenNessuna valutazione finora
- Energy Metering IC With SPI Interface and Active Power Pulse OutputDocumento44 pagineEnergy Metering IC With SPI Interface and Active Power Pulse Outputiskandarn_el5735Nessuna valutazione finora
- Tps 40056Documento34 pagineTps 40056cristian cendejasNessuna valutazione finora
- Driver Motores 2 PDFDocumento3 pagineDriver Motores 2 PDFluis martinezNessuna valutazione finora
- Motor Drive Boosterpack Quick Start Guide: Boostxl-Drv8301Documento3 pagineMotor Drive Boosterpack Quick Start Guide: Boostxl-Drv8301zhifeng yanNessuna valutazione finora
- TI Tpic2010Documento70 pagineTI Tpic2010nanobiomems7191Nessuna valutazione finora
- MC145190FDocumento25 pagineMC145190FBảo BìnhNessuna valutazione finora
- Dimming Ballast Controller IC M8165: Mosdesign Semiconductor CorpDocumento9 pagineDimming Ballast Controller IC M8165: Mosdesign Semiconductor CorpMaria ZageNessuna valutazione finora
- Datasheet NCP81109Documento28 pagineDatasheet NCP81109zigmund zigmundNessuna valutazione finora
- High Performance Resonant Mode Controllers: Semiconductor Technical DataDocumento12 pagineHigh Performance Resonant Mode Controllers: Semiconductor Technical DataNegru P. PlantatieNessuna valutazione finora
- Max1112 Max1113 PDFDocumento20 pagineMax1112 Max1113 PDFLong VũNessuna valutazione finora
- Emc SCADA PresentationDocumento36 pagineEmc SCADA Presentationerode els erodeNessuna valutazione finora
- BOSCH CJ135 Product Information 101201Documento2 pagineBOSCH CJ135 Product Information 101201Wang Zheng Feng100% (1)
- RGB To NTSC/PAL Encoder AD722Documento12 pagineRGB To NTSC/PAL Encoder AD722Firman TheLiverpudlianNessuna valutazione finora
- Cpu5a Flyer TechDocumento13 pagineCpu5a Flyer TechJean GrimNessuna valutazione finora
- HCPL 7710 300 AvagoDocumento19 pagineHCPL 7710 300 Avagohanif khanNessuna valutazione finora
- HCPL 7710 300 AvagoDocumento19 pagineHCPL 7710 300 Avagohanif khanNessuna valutazione finora
- BookDocumento8 pagineBookThakuri Man SinghNessuna valutazione finora
- Gps Module DatasheetDocumento13 pagineGps Module DatasheetBrian TaylorNessuna valutazione finora
- Ic - NCP1631Documento24 pagineIc - NCP1631Alexandre SoaresNessuna valutazione finora
- Advanced Motion Controls DPCANTE-015B200Documento10 pagineAdvanced Motion Controls DPCANTE-015B200Servo2GoNessuna valutazione finora
- P15D EN TM C-Epslanguage en-GBDocumento224 pagineP15D EN TM C-Epslanguage en-GBkouassi jean kablanNessuna valutazione finora
- Onsm S A0013302101 1Documento16 pagineOnsm S A0013302101 1123Nessuna valutazione finora
- 1..linear Integrated Circuits LabDocumento56 pagine1..linear Integrated Circuits Labp.m.muraliNessuna valutazione finora
- ncp1251 DDocumento25 paginencp1251 DAmilcar SilvaNessuna valutazione finora
- Xc800 App OcdsDocumento22 pagineXc800 App OcdskrrishNessuna valutazione finora
- Slyp 792Documento18 pagineSlyp 792Ahmed EidNessuna valutazione finora
- Sipeed Tang Primer Fpga Development BoardDocumento4 pagineSipeed Tang Primer Fpga Development BoardMiguel DavilaNessuna valutazione finora
- Complete DDR3/ DDR4 Memory Power Solution Controller: General Description FeaturesDocumento15 pagineComplete DDR3/ DDR4 Memory Power Solution Controller: General Description FeaturesIgor LabutinNessuna valutazione finora
- Tca9555 Low-Voltage 16-Bit I C and Smbus I/O Expander With Interrupt Output and Configuration RegistersDocumento46 pagineTca9555 Low-Voltage 16-Bit I C and Smbus I/O Expander With Interrupt Output and Configuration RegistersLuiz LuizNessuna valutazione finora
- Usblmc Cuh Digit v1 (2) enDocumento27 pagineUsblmc Cuh Digit v1 (2) enZeljko KrivokucaNessuna valutazione finora
- NCP1612 A 3Documento33 pagineNCP1612 A 3raudison souzaNessuna valutazione finora
- MCP 2561Documento30 pagineMCP 2561ZaegorNessuna valutazione finora
- MCP33131/21/11-XX: 1 Msps/500 KSPS 16/14/12-Bit Single-Ended Input SAR ADCDocumento54 pagineMCP33131/21/11-XX: 1 Msps/500 KSPS 16/14/12-Bit Single-Ended Input SAR ADCtrival001Nessuna valutazione finora
- Electronic Compass IC - HM55B (Datasheet)Documento7 pagineElectronic Compass IC - HM55B (Datasheet)Anirudha Mhase100% (1)
- DDX 2100Documento18 pagineDDX 2100Octavio RamirezNessuna valutazione finora
- Co2 Laser Card ManualDocumento11 pagineCo2 Laser Card ManualJuan Carlos CosmeNessuna valutazione finora
- Advanced Motion Controls DPCANTE-025B200Documento10 pagineAdvanced Motion Controls DPCANTE-025B200Servo2GoNessuna valutazione finora
- Programmable DC/DC Controller For Advanced Microprocessors: Device Package Temp Range (T)Documento6 pagineProgrammable DC/DC Controller For Advanced Microprocessors: Device Package Temp Range (T)ibrahim başderNessuna valutazione finora
- 2.6.1 Programme and Course Outcomes CIVIL Dept.Documento76 pagine2.6.1 Programme and Course Outcomes CIVIL Dept.PrashanthNessuna valutazione finora
- Question Papers Textbook Solutions MCQ Online Tests Important SolutionsDocumento5 pagineQuestion Papers Textbook Solutions MCQ Online Tests Important SolutionsPrashanthNessuna valutazione finora
- Applied Soft Computing: Quoc Bao Diep, Thanh Cong Truong, Swagatam Das, Ivan ZelinkaDocumento17 pagineApplied Soft Computing: Quoc Bao Diep, Thanh Cong Truong, Swagatam Das, Ivan ZelinkaPrashanthNessuna valutazione finora
- 1 s2.0 S187705091930420X MainDocumento8 pagine1 s2.0 S187705091930420X MainPrashanthNessuna valutazione finora
- 1409 Adm6 02dat Aircft Ee R13Documento4 pagine1409 Adm6 02dat Aircft Ee R13PrashanthNessuna valutazione finora
- Current Challenges and Opportunities For Space Technologies: Setting The SceneDocumento5 pagineCurrent Challenges and Opportunities For Space Technologies: Setting The ScenePrashanthNessuna valutazione finora
- Massachusetts Institute of Technology Department of Mechanical EngineeringDocumento27 pagineMassachusetts Institute of Technology Department of Mechanical EngineeringarulmuruguNessuna valutazione finora
- Assembly and Working DrawingDocumento63 pagineAssembly and Working Drawingtechnowilliams480Nessuna valutazione finora
- P. Smith Drawing For Engineering 2000Documento212 pagineP. Smith Drawing For Engineering 2000ozcanokNessuna valutazione finora
- 16.810 L8 OptimizationDocumento58 pagine16.810 L8 OptimizationsaravanaNessuna valutazione finora
- Aero ACD Reg13Documento172 pagineAero ACD Reg13PrashanthNessuna valutazione finora
- Journal of Spacecraft and 2 PDFDocumento11 pagineJournal of Spacecraft and 2 PDFPrashanthNessuna valutazione finora
- RMC Poster-2020Documento1 paginaRMC Poster-2020PrashanthNessuna valutazione finora
- Unit E-Working - DrawingsDocumento30 pagineUnit E-Working - DrawingsPrashanthNessuna valutazione finora
- MEM201 L6-Tolerance RCDocumento31 pagineMEM201 L6-Tolerance RCKaliya PerumalNessuna valutazione finora
- Assembly Drawing: by Dr. Mahdi DamghaniDocumento59 pagineAssembly Drawing: by Dr. Mahdi Damghaniallahmahdiali100% (3)
- Xu-Shi2015 Article AnOverviewOnFlightDynamicsAndCDocumento19 pagineXu-Shi2015 Article AnOverviewOnFlightDynamicsAndCPrashanthNessuna valutazione finora
- Section11 2Documento70 pagineSection11 2PrashanthNessuna valutazione finora
- Cad Cam CaeDocumento43 pagineCad Cam CaePrashanthNessuna valutazione finora
- Jan 2017Documento2 pagineJan 2017PrashanthNessuna valutazione finora
- FootscanDocumento8 pagineFootscanPrashanthNessuna valutazione finora
- Computer Aided DesignDocumento162 pagineComputer Aided DesignAvi SinghNessuna valutazione finora
- Teaching StatementDocumento2 pagineTeaching StatementPrashanthNessuna valutazione finora
- Questions 1Documento3 pagineQuestions 1krp_212003Nessuna valutazione finora
- Pengaruh Promosi Dan Brand Image (Citra Produk) Terhadap Loyalitas Pembelian Produk Pepsodent Di Ramayana Plaza, Jalan Aksara, Medan Dita AmanahDocumento13 paginePengaruh Promosi Dan Brand Image (Citra Produk) Terhadap Loyalitas Pembelian Produk Pepsodent Di Ramayana Plaza, Jalan Aksara, Medan Dita AmanahAhmad HerdandiNessuna valutazione finora
- Doyennés Et Granges de L'abbaye de Cluny (A. Guerreau)Documento45 pagineDoyennés Et Granges de L'abbaye de Cluny (A. Guerreau)theseus11Nessuna valutazione finora
- 3.6 A 40Nm Cmos Highly Linear 0.4-To-6Ghz Receiver Resilient To 0Dbm Out-Of-Band BlockersDocumento3 pagine3.6 A 40Nm Cmos Highly Linear 0.4-To-6Ghz Receiver Resilient To 0Dbm Out-Of-Band Blockershaoyue huangNessuna valutazione finora
- ScriptDocumento12 pagineScriptWaleed Nadeem50% (2)
- Shaira Narrative Report (Final)Documento7 pagineShaira Narrative Report (Final)Sheryll TamangNessuna valutazione finora
- DBL10 - Sapporo X Schematics Document: Compal ConfidentialDocumento50 pagineDBL10 - Sapporo X Schematics Document: Compal ConfidentialEvgeniy BaranovskiyNessuna valutazione finora
- RULE 130 Rules of CourtDocumento141 pagineRULE 130 Rules of CourtalotcepilloNessuna valutazione finora
- Perfume 130Documento3 paginePerfume 130Gurdeep BhattalNessuna valutazione finora
- "Design, Modeling and Analysis of Steam Turbine Blade": Dayananda Sagar College of EngineeringDocumento66 pagine"Design, Modeling and Analysis of Steam Turbine Blade": Dayananda Sagar College of EngineeringSHREENIVAS MNessuna valutazione finora
- Marketing Research Completed RevisedDocumento70 pagineMarketing Research Completed RevisedJodel DagoroNessuna valutazione finora
- UW Mathematics Professor Evaluations For Fall 2011Documento241 pagineUW Mathematics Professor Evaluations For Fall 2011DPNessuna valutazione finora
- Simon Bolivar PresentationDocumento7 pagineSimon Bolivar Presentationapi-345742212Nessuna valutazione finora
- Network Models For Seat Allocation On Flights: Moshe Dror,?Documento12 pagineNetwork Models For Seat Allocation On Flights: Moshe Dror,?Isabel VillaNessuna valutazione finora
- Dry Docking QuotationDocumento4 pagineDry Docking Quotationboen jayme100% (1)
- Unit 8 Atomic Fluorescence Spectrometry PDFDocumento23 pagineUnit 8 Atomic Fluorescence Spectrometry PDFCh AswadNessuna valutazione finora
- SFC PresentationDocumento51 pagineSFC PresentationjmtriggerzNessuna valutazione finora
- Artikel 8 - (CURRICULUM EVALUATION)Documento12 pagineArtikel 8 - (CURRICULUM EVALUATION)Kikit8Nessuna valutazione finora
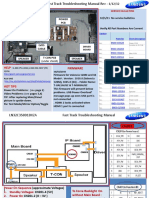
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Documento4 pagineSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonNessuna valutazione finora
- Budgetary Quote HPE AMD 128cores For DNDSSGDocumento7 pagineBudgetary Quote HPE AMD 128cores For DNDSSGglalit kumarNessuna valutazione finora
- Binary To DecimalDocumento8 pagineBinary To DecimalEmmanuel JoshuaNessuna valutazione finora
- Machine Learning and Supply Chain Management - ADocumento5 pagineMachine Learning and Supply Chain Management - AAhmed AbassNessuna valutazione finora
- D1 001 Prof Rudi STAR - DM in Indonesia - From Theory To The Real WorldDocumento37 pagineD1 001 Prof Rudi STAR - DM in Indonesia - From Theory To The Real WorldNovietha Lia FarizymelinNessuna valutazione finora
- Irjet V3i7146 PDFDocumento6 pagineIrjet V3i7146 PDFatulnarkhede2002Nessuna valutazione finora
- Application List: Required Items: A: Cpu-95 Ignition ModuleDocumento12 pagineApplication List: Required Items: A: Cpu-95 Ignition ModuleShubra DebNessuna valutazione finora
- Another Look at Pistis ChristouDocumento17 pagineAnother Look at Pistis Christouakimel100% (1)
- Unit 6 Selected and Short AnswersDocumento19 pagineUnit 6 Selected and Short Answersbebepic355Nessuna valutazione finora
- IELTS Materials ReadingDocumento9 pagineIELTS Materials ReadingßläcklìsètèdTȜè0% (1)
- Arithmetic Mean PDFDocumento29 pagineArithmetic Mean PDFDivya Gothi100% (1)
- Vertical Transportation: Commercial, Hotel, Hospital, Etc)Documento5 pagineVertical Transportation: Commercial, Hotel, Hospital, Etc)fdarchitectNessuna valutazione finora