Potrebbero piacerti anche
- AI SummaryDocumento4 pagineAI SummarySaidur RahmanNessuna valutazione finora
- Predicate LogicDocumento64 paginePredicate LogicSaidur RahmanNessuna valutazione finora
- Natural Language ProcessingDocumento47 pagineNatural Language ProcessingSaidur RahmanNessuna valutazione finora
- Natural Language Processing PDFDocumento47 pagineNatural Language Processing PDFSaidur Rahman100% (1)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Bombas KMPDocumento42 pagineBombas KMPReagrinca Ventas80% (5)
- Mining Discriminative Patterns To Predict Health Status For Cardiopulmonary PatientsDocumento56 pagineMining Discriminative Patterns To Predict Health Status For Cardiopulmonary Patientsaniltatti25Nessuna valutazione finora
- HP Scanjet Pro 2500 F1 Flatbed Scanner: Boost Productivity With Fast, Versatile ScanningDocumento2 pagineHP Scanjet Pro 2500 F1 Flatbed Scanner: Boost Productivity With Fast, Versatile ScanningParesh BabariaNessuna valutazione finora
- Corrosion Protection PT Tosanda Dwi SapurwaDocumento18 pagineCorrosion Protection PT Tosanda Dwi SapurwaYoga FirmansyahNessuna valutazione finora
- HCH - 15 04 004Documento5 pagineHCH - 15 04 004NarvaxisNessuna valutazione finora
- Kat-A 4102 Rotovalve Edition3!12!02-2013 enDocumento4 pagineKat-A 4102 Rotovalve Edition3!12!02-2013 enWalter PiracocaNessuna valutazione finora
- Powerplant QuestionsDocumento19 paginePowerplant QuestionsAshok KumarNessuna valutazione finora
- Application Letter For Promotion T2 T3Documento24 pagineApplication Letter For Promotion T2 T3FGacadSabadoNessuna valutazione finora
- Noth PicturesDocumento17 pagineNoth PicturesJana AssaNessuna valutazione finora
- William Ury Power of A Positive No Bantam - 2007Documento227 pagineWilliam Ury Power of A Positive No Bantam - 2007Tam Jeopardy100% (1)
- 19 71 Hydrologic Engineering Methods For Water Resources DevelopmentDocumento654 pagine19 71 Hydrologic Engineering Methods For Water Resources DevelopmentMartha LetchingerNessuna valutazione finora
- WT Capability Statement PE 2020Documento1 paginaWT Capability Statement PE 2020Muhannad SuliemanNessuna valutazione finora
- Zener Tester: by MedhatkoDocumento6 pagineZener Tester: by Medhatkosaran gulNessuna valutazione finora
- Empowerment Technology Lesson 4 PDFDocumento18 pagineEmpowerment Technology Lesson 4 PDFqueenless eightyoneNessuna valutazione finora
- GE Uno Downlight Backlit BLDocumento2 pagineGE Uno Downlight Backlit BLChen KengloonNessuna valutazione finora
- Natal Chart Report PDFDocumento17 pagineNatal Chart Report PDFAnastasiaNessuna valutazione finora
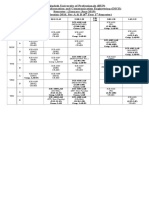
- Class Routine Final 13.12.18Documento7 pagineClass Routine Final 13.12.18RakibNessuna valutazione finora
- Ib Psychology - Perfect Saq Examination Answers PDFDocumento2 pagineIb Psychology - Perfect Saq Examination Answers PDFzeelaf siraj0% (2)
- Types of ComputersDocumento7 pagineTypes of ComputersSyed Badshah YousafzaiNessuna valutazione finora
- Concept of Lokmitra Kendra in Himachal PradeshDocumento2 pagineConcept of Lokmitra Kendra in Himachal PradeshSureshSharmaNessuna valutazione finora
- Engineering Geology: Wei-Min Ye, Yong-Gui Chen, Bao Chen, Qiong Wang, Ju WangDocumento9 pagineEngineering Geology: Wei-Min Ye, Yong-Gui Chen, Bao Chen, Qiong Wang, Ju WangmazharNessuna valutazione finora
- The 5 Pivotal Paragraphs in A PaperDocumento1 paginaThe 5 Pivotal Paragraphs in A PaperFer Rivas NietoNessuna valutazione finora
- SD-NOC-MAR-202 - Rev00 Transfer of Personnel at Offshore FacilitiesDocumento33 pagineSD-NOC-MAR-202 - Rev00 Transfer of Personnel at Offshore Facilitiestho03103261100% (1)
- SQL - Day 2: Structured Query LanguageDocumento10 pagineSQL - Day 2: Structured Query LanguageNight KingNessuna valutazione finora
- Classroom Management PlanDocumento14 pagineClassroom Management PlancowlesmathNessuna valutazione finora
- Matsusada DC-DC ConvertersDocumento4 pagineMatsusada DC-DC ConvertersAP SinghNessuna valutazione finora
- 1988 Mazda 323 Workshop Manual V1.0 (Turbo Only)Documento880 pagine1988 Mazda 323 Workshop Manual V1.0 (Turbo Only)Mike Marquez100% (2)
- Cambridge IGCSE ™: Combined ScienceDocumento11 pagineCambridge IGCSE ™: Combined ScienceAhmed Jomaa Salem0% (1)
- Mathematics4 q4 Week4 v4Documento11 pagineMathematics4 q4 Week4 v4Morales JinxNessuna valutazione finora
- 1st Unseen Passage For Class 5 in EnglishDocumento7 pagine1st Unseen Passage For Class 5 in EnglishVibhav SinghNessuna valutazione finora