Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Push Button Agent Abort Switch Cut Sheet PDFDocumento2 paginePush Button Agent Abort Switch Cut Sheet PDFAli HadiNessuna valutazione finora
- AI - Heavy Hex Structural BoltDocumento104 pagineAI - Heavy Hex Structural BoltHugo Mario Ariza PalacioNessuna valutazione finora
- Motor 60Z02152 - 03 (1) CAT3306 CrankshaftDocumento5 pagineMotor 60Z02152 - 03 (1) CAT3306 CrankshaftIsmael De Jesus AndradeNessuna valutazione finora
- 6MF28320AA00 Datasheet enDocumento2 pagine6MF28320AA00 Datasheet enLeandro PlácidoNessuna valutazione finora
- History of ComputerDocumento5 pagineHistory of ComputerGlad RoblesNessuna valutazione finora
- How To Detect Insulation Failures in Electrical EquipmentDocumento7 pagineHow To Detect Insulation Failures in Electrical EquipmentchandruuncleNessuna valutazione finora
- Broadcom Wireless Card TutorialDocumento124 pagineBroadcom Wireless Card TutorialopsinghNessuna valutazione finora
- On The Simulation of Three Phase Induction Machine PDFDocumento3 pagineOn The Simulation of Three Phase Induction Machine PDFJOHN MINKHANTNessuna valutazione finora
- Downloaded From Manuals Search EngineDocumento28 pagineDownloaded From Manuals Search Enginealfz samNessuna valutazione finora
- ALU DesignDocumento5 pagineALU DesignasdNessuna valutazione finora
- A Study On MicropocessorDocumento12 pagineA Study On MicropocessormanaskollamNessuna valutazione finora
- Towcon Manual PDFDocumento124 pagineTowcon Manual PDFThiago LimaNessuna valutazione finora
- Jib Crane 1Documento28 pagineJib Crane 1OPAZOSCNessuna valutazione finora
- s71500 Et200mp System Manual en-US en-USDocumento241 pagines71500 Et200mp System Manual en-US en-USzuda.ahamdNessuna valutazione finora
- Avanza 2015 PDFDocumento5 pagineAvanza 2015 PDFargya AwangNessuna valutazione finora
- Servo Info and CenteringDocumento5 pagineServo Info and Centeringspy004Nessuna valutazione finora
- Air Compressor: C20160-1790, Issue 1, January 2000Documento26 pagineAir Compressor: C20160-1790, Issue 1, January 2000RomanCHubaNessuna valutazione finora
- ABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHADocumento5 pagineABB Publication 1MRK509015-BEN C en High Impedance Differential Relay RADHAjavedsmg1Nessuna valutazione finora
- Low Distortion Audio Range ..Documento2 pagineLow Distortion Audio Range ..ztmpztmpNessuna valutazione finora
- Toughswitch Poe DsDocumento8 pagineToughswitch Poe DsEdgarEmilioPalmaMarroquínNessuna valutazione finora
- Single PhasingDocumento22 pagineSingle PhasingAakarsh Rastogi100% (2)
- Technical Data: G2750SMU5Documento3 pagineTechnical Data: G2750SMU5Wilman Elias Gutierrez RadaNessuna valutazione finora
- Mf15 Performance Diagnostics Eged535Documento14 pagineMf15 Performance Diagnostics Eged535Trung hiếu Nguyễn lêNessuna valutazione finora
- DH61CR ProductGuide03 EnglishDocumento78 pagineDH61CR ProductGuide03 EnglishCarlos Miguel RamirezNessuna valutazione finora
- VRV IV S Didvs2001 PDFDocumento14 pagineVRV IV S Didvs2001 PDFmas zak danielNessuna valutazione finora
- TORO Reelmaster 3100-DDocumento306 pagineTORO Reelmaster 3100-Ddalidelia100% (1)
- HE800DIQ716CDocumento8 pagineHE800DIQ716CRicardo NunesNessuna valutazione finora
- The Ayla Vacuum - Ayla and CompanyDocumento1 paginaThe Ayla Vacuum - Ayla and CompanySteveNessuna valutazione finora
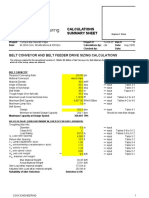
- Belt Conveyors With Shaft SizingDocumento5 pagineBelt Conveyors With Shaft SizingRakhi Mor100% (2)
- MCS025 Synchro-Check Module: InstallationDocumento1 paginaMCS025 Synchro-Check Module: Installationوسام وسامNessuna valutazione finora