Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Introduction To Java Programming: ObjectivesDocumento14 pagineIntroduction To Java Programming: ObjectivesSonu SachdevNessuna valutazione finora
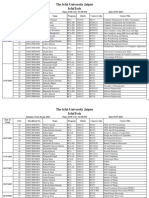
- Time Table Summer Term Exam 2023 - Revised05.07.2023Documento2 pagineTime Table Summer Term Exam 2023 - Revised05.07.2023vivek meenaNessuna valutazione finora
- Mingw Termios.hDocumento3 pagineMingw Termios.hzxNessuna valutazione finora
- Daa Unit 2 NotesDocumento22 pagineDaa Unit 2 NotesHarsh Vardhan HBTUNessuna valutazione finora
- Ass Introduction To Object Oriented Programming & C++Documento23 pagineAss Introduction To Object Oriented Programming & C++محمد ود الكنان100% (1)
- Q. No. Description Question Choices Unit I-Introduction: 1 1 EasyDocumento15 pagineQ. No. Description Question Choices Unit I-Introduction: 1 1 EasyArchana SainiNessuna valutazione finora
- Visual-Basic MCQ3Documento22 pagineVisual-Basic MCQ3Panjatcharam VgNessuna valutazione finora
- 2 Python Regular Expression Patterns ListDocumento4 pagine2 Python Regular Expression Patterns ListArvindSharmaNessuna valutazione finora
- M.Owais - 18EL46 (Assignment 2)Documento6 pagineM.Owais - 18EL46 (Assignment 2)Islam CandleNessuna valutazione finora
- Midterm Data StructureDocumento6 pagineMidterm Data StructureTorres, Luigi P.Nessuna valutazione finora
- DL Unit 4 NotesDocumento21 pagineDL Unit 4 NotesMynapati PrasudhaNessuna valutazione finora
- DB Topic 5Documento29 pagineDB Topic 5Online MoneyNessuna valutazione finora
- SQL Express Scripting From Wincc AdvancedDocumento12 pagineSQL Express Scripting From Wincc AdvancedjoneschnNessuna valutazione finora
- Commenting Functionality in SAP Analytics Cloud (SAC)Documento6 pagineCommenting Functionality in SAP Analytics Cloud (SAC)ARPITA BISWASNessuna valutazione finora
- Tal Reference ManualDocumento638 pagineTal Reference ManualAlvaro Pereira PachecoNessuna valutazione finora
- Apex Developer GuideDocumento584 pagineApex Developer GuideRaghu Dutt CheruvuNessuna valutazione finora
- Test To Pass & Fail/ Equilance PartitioningDocumento21 pagineTest To Pass & Fail/ Equilance PartitioningAnkur SinghNessuna valutazione finora
- Onlinefiletools Logo Https://Onlinefil Online CSV Toolsonline TSV Toolsonline Json Toolsonline Yaml Toolsonlinexml ToolsonlineDocumento23 pagineOnlinefiletools Logo Https://Onlinefil Online CSV Toolsonline TSV Toolsonline Json Toolsonline Yaml Toolsonlinexml ToolsonlineglabolhumarNessuna valutazione finora
- Smartsense Campus Hiring Coding TaskDocumento3 pagineSmartsense Campus Hiring Coding TaskRaj PrajapatiNessuna valutazione finora
- Session 14 - 15 - Introduction MongoDBDocumento29 pagineSession 14 - 15 - Introduction MongoDBTrung NguyễnNessuna valutazione finora
- Web Programming-II Course OutlineDocumento4 pagineWeb Programming-II Course OutlineArshad MohmandNessuna valutazione finora
- Using Named Hierarchy Levels With TM1Documento4 pagineUsing Named Hierarchy Levels With TM1grofatyNessuna valutazione finora
- Coding Problem - Jvd2101Documento2 pagineCoding Problem - Jvd2101dp jabunNessuna valutazione finora
- Vtu Cs SyllabusDocumento12 pagineVtu Cs SyllabusShankha Suvro DuttaNessuna valutazione finora
- Chapter 5: Overview of Query ProcessingDocumento18 pagineChapter 5: Overview of Query ProcessingAnurag UpadhyayNessuna valutazione finora
- Autocad Vba Programming: Tools and TechniquesDocumento7 pagineAutocad Vba Programming: Tools and TechniquesRaju Thapa MagarNessuna valutazione finora
- Unit 5 Software Development, Design and Testing: StructureDocumento24 pagineUnit 5 Software Development, Design and Testing: StructureAnonymous bTh744z7E6Nessuna valutazione finora
- DB Lecture Note All in ONEDocumento85 pagineDB Lecture Note All in ONEyonasante2121Nessuna valutazione finora
- Chapter 3: Cluster Analysis: 3.1 Basic Concepts of ClusteringDocumento33 pagineChapter 3: Cluster Analysis: 3.1 Basic Concepts of ClusteringpreetamNessuna valutazione finora
- K-Means ClusteringDocumento16 pagineK-Means ClusteringLUCKYNessuna valutazione finora