Potrebbero piacerti anche
- Mestrado OlmedeDocumento167 pagineMestrado OlmedeADRIANONessuna valutazione finora
- Seção 4.3 e 4.4 - Cálculo NuméricoDocumento9 pagineSeção 4.3 e 4.4 - Cálculo NuméricoADRIANONessuna valutazione finora
- ConjuntoDocumento3 pagineConjuntoADRIANONessuna valutazione finora
- Materials 17 00968Documento16 pagineMaterials 17 00968ADRIANONessuna valutazione finora
- Introdução Ao Cálculo Das Probabilidades e CombinatóriaDocumento90 pagineIntrodução Ao Cálculo Das Probabilidades e CombinatóriaADRIANONessuna valutazione finora
- Fisica Geral e Experimental - EnergiaDocumento2 pagineFisica Geral e Experimental - EnergiaADRIANONessuna valutazione finora
- Revisão - SoldagemDocumento38 pagineRevisão - SoldagemADRIANONessuna valutazione finora
- Seção 4.3 e 4.4 - Cálculo NuméricoDocumento18 pagineSeção 4.3 e 4.4 - Cálculo NuméricoADRIANONessuna valutazione finora
- Seção 4.2 - Cálculo NuméricoDocumento7 pagineSeção 4.2 - Cálculo NuméricoADRIANONessuna valutazione finora
- Seção 3.3 e 3.4 - Cálculo NuméricoDocumento24 pagineSeção 3.3 e 3.4 - Cálculo NuméricoADRIANONessuna valutazione finora
- Seção 2.2 - Cálculo NuméricoDocumento37 pagineSeção 2.2 - Cálculo NuméricoADRIANONessuna valutazione finora
- 10 10 18 Gestão Da ProduçãoDocumento181 pagine10 10 18 Gestão Da ProduçãoADRIANONessuna valutazione finora
- Seção 1.3 e 1.4 Cálculo NuméricoDocumento22 pagineSeção 1.3 e 1.4 Cálculo NuméricoADRIANONessuna valutazione finora
- Seção 3.1 - Calculo 3Documento15 pagineSeção 3.1 - Calculo 3ADRIANONessuna valutazione finora
- Seção 1.3-Calculo 3Documento34 pagineSeção 1.3-Calculo 3ADRIANONessuna valutazione finora
- Seção 4.2 - Cálculo NuméricoDocumento13 pagineSeção 4.2 - Cálculo NuméricoADRIANONessuna valutazione finora
- Seção 1.4-Calculo 3Documento40 pagineSeção 1.4-Calculo 3ADRIANONessuna valutazione finora
- Seção 4.2 - Elementos de Maquinas IDocumento21 pagineSeção 4.2 - Elementos de Maquinas IADRIANONessuna valutazione finora
- Seção 1.2-Calculo 3Documento19 pagineSeção 1.2-Calculo 3ADRIANONessuna valutazione finora
- Elementos de Máquinas - 01 - 10 - 2018Documento2 pagineElementos de Máquinas - 01 - 10 - 2018ADRIANONessuna valutazione finora
- Seção 1.3 - Elementos de Maquinas IDocumento10 pagineSeção 1.3 - Elementos de Maquinas IADRIANONessuna valutazione finora
- Seção 3.3 - 4.1 - Elementos de Maquinas IDocumento23 pagineSeção 3.3 - 4.1 - Elementos de Maquinas IADRIANONessuna valutazione finora
- Controle de VibraçõesDocumento48 pagineControle de VibraçõesADRIANO100% (1)
- Aula 0 - Regras Gerais - VibraçõesDocumento61 pagineAula 0 - Regras Gerais - VibraçõesADRIANONessuna valutazione finora
- Revisão Gestão Da ProduçãoDocumento47 pagineRevisão Gestão Da ProduçãoADRIANONessuna valutazione finora
- Seção 1.1 e 1.2 - Cálculo NuméricoDocumento25 pagineSeção 1.1 e 1.2 - Cálculo NuméricoADRIANONessuna valutazione finora
- Física - Pré-Vestibular Dom Bosco - Gab-Fis1-Ex5Documento8 pagineFísica - Pré-Vestibular Dom Bosco - Gab-Fis1-Ex5Física Caderno de Resoluções100% (2)
- Estruturas Hiperestáticas 1Documento15 pagineEstruturas Hiperestáticas 1paulo1henrique.britosilveiraNessuna valutazione finora
- Kalid Apostila de Estratégias de ControleDocumento100 pagineKalid Apostila de Estratégias de ControleAdalicio Neto100% (1)
- Roteiro para Elaboração de Projeto de Irrigação Por AspersãoDocumento5 pagineRoteiro para Elaboração de Projeto de Irrigação Por Aspersãotayris lucasNessuna valutazione finora
- Quimica 11 ClasseDocumento154 pagineQuimica 11 ClasseDann Santiago100% (2)
- Fundição em Molde de Areia VerdeDocumento6 pagineFundição em Molde de Areia VerdeRui GalvaniNessuna valutazione finora
- Teste Sensor de VelocidadeDocumento7 pagineTeste Sensor de VelocidadeAnderson gonçalvesNessuna valutazione finora
- Curso de SigilosDocumento37 pagineCurso de Sigilosdistopia699100% (5)
- Atividade Parte 3Documento4 pagineAtividade Parte 3Marcos Antonio SantosNessuna valutazione finora
- Avaliação Formativa de Novembro - Mat 4º AnoDocumento4 pagineAvaliação Formativa de Novembro - Mat 4º AnoJorgeNessuna valutazione finora
- Operating and Safety Manual - PortugueseDocumento262 pagineOperating and Safety Manual - PortugueseJacson Junior100% (1)
- BIOTECDocumento5 pagineBIOTECadlzilliNessuna valutazione finora
- Manual Dobragem de TubosDocumento18 pagineManual Dobragem de TubosFilipe Coimbra100% (2)
- LogaritimoDocumento36 pagineLogaritimoJunior FlavioNessuna valutazione finora
- Volumetria Ácido-Base EXPDocumento11 pagineVolumetria Ácido-Base EXPJamanaNessuna valutazione finora
- Exercicios Resolvidos - Eletricidade - F PDFDocumento43 pagineExercicios Resolvidos - Eletricidade - F PDFMarcela BorgesNessuna valutazione finora
- 2011 - 05 - 13 - CNO LavilleDocumento84 pagine2011 - 05 - 13 - CNO LavillePedro CalhauNessuna valutazione finora
- Manual de Produto CarelDocumento2 pagineManual de Produto CarelMauricioss2313 SoaresNessuna valutazione finora
- Lista de PolinomiosDocumento1 paginaLista de Polinomiosapi-3811902Nessuna valutazione finora
- Eixo Traseiro RS-220 230 240Documento136 pagineEixo Traseiro RS-220 230 240dieg.reisdosanjos4Nessuna valutazione finora
- Link TeletronixDocumento68 pagineLink TeletronixLuduvico Claudio100% (1)
- Teste Avaliacao 5ano NOV16Documento5 pagineTeste Avaliacao 5ano NOV16paulaNessuna valutazione finora
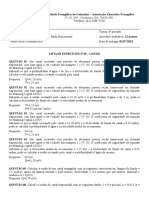
- Lista de Exercícios 3Documento3 pagineLista de Exercícios 3Anne Caroline De Paula NascimentoNessuna valutazione finora
- 2018 Grelha Curricular Curso EstatisticaDocumento4 pagine2018 Grelha Curricular Curso EstatisticaManuel LuisNessuna valutazione finora
- Biologia Molecular - Resumos TeóricaDocumento123 pagineBiologia Molecular - Resumos TeóricaHugo RochaNessuna valutazione finora
- 3 - A Medida Do Tempo e A Idade Da TerraDocumento37 pagine3 - A Medida Do Tempo e A Idade Da TerraAliceNessuna valutazione finora
- Sistema CS ScaniaDocumento30 pagineSistema CS Scaniaedivaldo3veronese97% (32)
- Lista de Exercicios Dinamica 1ano1Documento6 pagineLista de Exercicios Dinamica 1ano1Ana PereiraNessuna valutazione finora
- Lista de Exercc3adcios Progressc3a3o Aritmc3a9tica1Documento3 pagineLista de Exercc3adcios Progressc3a3o Aritmc3a9tica1Anna BorgesNessuna valutazione finora
- 5-Biofisica Dos Sistemas BiologicosDocumento45 pagine5-Biofisica Dos Sistemas BiologicosFagnerclNessuna valutazione finora