Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Population - Concept & Trends PDFDocumento32 paginePopulation - Concept & Trends PDFsanjay hansdakNessuna valutazione finora
- 63edc16ea9345e001870a517 - ## - Geography Class Time TableDocumento1 pagina63edc16ea9345e001870a517 - ## - Geography Class Time Tablesanjay hansdakNessuna valutazione finora
- L3 Crux - National Income 2 - 1676080042 PDFDocumento49 pagineL3 Crux - National Income 2 - 1676080042 PDFsanjay hansdakNessuna valutazione finora
- Structure of Indian Economy Polpulation Part 2Documento12 pagineStructure of Indian Economy Polpulation Part 2sanjay hansdakNessuna valutazione finora
- Constructer & DestructerDocumento12 pagineConstructer & DestructerAmit KumarNessuna valutazione finora
- Planning Before Independence PDFDocumento21 paginePlanning Before Independence PDFsanjay hansdakNessuna valutazione finora
- Histroy To Know Class 6Documento151 pagineHistroy To Know Class 6sanjay hansdakNessuna valutazione finora
- Constructer & DestructerDocumento12 pagineConstructer & DestructerAmit KumarNessuna valutazione finora
- Constructer & DestructerDocumento12 pagineConstructer & DestructerAmit KumarNessuna valutazione finora
- India 7Documento133 pagineIndia 7sanjay hansdakNessuna valutazione finora
- Classes and ObjectsDocumento34 pagineClasses and Objectssanjay hansdakNessuna valutazione finora
- CS641Documento2 pagineCS641sanjay hansdakNessuna valutazione finora
- Class 7 Medieval India Romila ThaparDocumento133 pagineClass 7 Medieval India Romila Thaparsanjay hansdakNessuna valutazione finora
- History To Know Class 7Documento133 pagineHistory To Know Class 7sanjay hansdakNessuna valutazione finora
- ShowPdf PDFDocumento555 pagineShowPdf PDFRiyaNessuna valutazione finora
- Class 6 Ancient India Romila ThaparDocumento151 pagineClass 6 Ancient India Romila Thaparsanjay hansdakNessuna valutazione finora
- Chapter 1 - (Philoid-IN) PDFDocumento9 pagineChapter 1 - (Philoid-IN) PDFArka Narayan DashguptaNessuna valutazione finora
- Strings and Pattern SearchingDocumento80 pagineStrings and Pattern SearchingAsafAhmadNessuna valutazione finora
- Applied SciencesDocumento19 pagineApplied Sciencessanjay hansdakNessuna valutazione finora
- Split Complex Dating Recommender SystemDocumento9 pagineSplit Complex Dating Recommender Systemsanjay hansdakNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Technical Engineering PEEDocumento3 pagineTechnical Engineering PEEMariano Acosta Landicho Jr.Nessuna valutazione finora
- Divider Block Accessory LTR HowdenDocumento4 pagineDivider Block Accessory LTR HowdenjasonNessuna valutazione finora
- Chapter 1 Hospital and Clinical Pharmacy Choplete PDF Notes D.Pharma 2nd Notes PDF NoteskartsDocumento7 pagineChapter 1 Hospital and Clinical Pharmacy Choplete PDF Notes D.Pharma 2nd Notes PDF NoteskartsDrx Brajendra LodhiNessuna valutazione finora
- Analysis of Brand Activation and Digital Media On The Existence of Local Product Based On Korean Fashion (Case Study On Online Clothing Byeol - Thebrand)Documento11 pagineAnalysis of Brand Activation and Digital Media On The Existence of Local Product Based On Korean Fashion (Case Study On Online Clothing Byeol - Thebrand)AJHSSR JournalNessuna valutazione finora
- LR Format 1.2Documento1 paginaLR Format 1.2Ch.Suresh SuryaNessuna valutazione finora
- INTERNATIONAL BUSINESS DYNAMIC (Global Operation MGT)Documento7 pagineINTERNATIONAL BUSINESS DYNAMIC (Global Operation MGT)Shashank DurgeNessuna valutazione finora
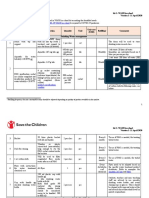
- Kit 2: Essential COVID-19 WASH in SchoolDocumento8 pagineKit 2: Essential COVID-19 WASH in SchooltamanimoNessuna valutazione finora
- Incoterms 2010 PresentationDocumento47 pagineIncoterms 2010 PresentationBiswajit DuttaNessuna valutazione finora
- Reflection Paper 1Documento5 pagineReflection Paper 1Juliean Torres AkiatanNessuna valutazione finora
- Spare Parts ManagementDocumento21 pagineSpare Parts Managementdajit1100% (1)
- S200 For Sumber RezekiDocumento2 pagineS200 For Sumber RezekiIfan JayusdianNessuna valutazione finora
- DevelopmentPermission Handbook T&CPDocumento43 pagineDevelopmentPermission Handbook T&CPShanmukha KattaNessuna valutazione finora
- Chapter 1.4Documento11 pagineChapter 1.4Gie AndalNessuna valutazione finora
- QP 4Documento4 pagineQP 4Yusra RaoufNessuna valutazione finora
- List of Light Commercial LED CodesDocumento8 pagineList of Light Commercial LED CodesRenan GonzalezNessuna valutazione finora
- Surge Arrester: Technical DataDocumento5 pagineSurge Arrester: Technical Datamaruf048Nessuna valutazione finora
- Press Release - INTRODUCING THE NEW LAND ROVER DEFENDER PDFDocumento6 paginePress Release - INTRODUCING THE NEW LAND ROVER DEFENDER PDFJay ShahNessuna valutazione finora
- Jainithesh - Docx CorrectedDocumento54 pagineJainithesh - Docx CorrectedBala MuruganNessuna valutazione finora
- WWW - Manaresults.co - In: Internet of ThingsDocumento3 pagineWWW - Manaresults.co - In: Internet of Thingsbabudurga700Nessuna valutazione finora
- Spine Beam - SCHEME 4Documento28 pagineSpine Beam - SCHEME 4Edi ObrayanNessuna valutazione finora
- จัดตารางสอบกลางภาคภาคต้น53Documento332 pagineจัดตารางสอบกลางภาคภาคต้น53Yuwarath SuktrakoonNessuna valutazione finora
- Chapter 11 Walter Nicholson Microcenomic TheoryDocumento15 pagineChapter 11 Walter Nicholson Microcenomic TheoryUmair QaziNessuna valutazione finora
- Triplex (Triple Full Free Panoramic) Mast (5M15D To 5M35D) : Structure and FunctionDocumento2 pagineTriplex (Triple Full Free Panoramic) Mast (5M15D To 5M35D) : Structure and FunctionMaz Ariez EkaNessuna valutazione finora
- Toshiba Satellite L200 M200 M203 M206 KBTIDocumento59 pagineToshiba Satellite L200 M200 M203 M206 KBTIYakub LismaNessuna valutazione finora
- Pharaoh TextDocumento143 paginePharaoh Textanon_31362848Nessuna valutazione finora
- SKF LGMT-2 Data SheetDocumento2 pagineSKF LGMT-2 Data SheetRahul SharmaNessuna valutazione finora
- Relationship Between Principal Leadership Skills and Teachers' Organizational Citizenship BehaviourDocumento16 pagineRelationship Between Principal Leadership Skills and Teachers' Organizational Citizenship BehaviourToe ToeNessuna valutazione finora
- Sikkim Manipal MBA 1 SEM MB0038-Management Process and Organization Behavior-MQPDocumento15 pagineSikkim Manipal MBA 1 SEM MB0038-Management Process and Organization Behavior-MQPHemant MeenaNessuna valutazione finora
- SWOT AnalysisDocumento6 pagineSWOT AnalysisSSPK_92Nessuna valutazione finora
- Fammthya 000001Documento87 pagineFammthya 000001Mohammad NorouzzadehNessuna valutazione finora