Potrebbero piacerti anche
- 850-860-870-D670 Planned Maintenance SM - SM - 5718529-1EN - 7Documento218 pagine850-860-870-D670 Planned Maintenance SM - SM - 5718529-1EN - 7rao3farhat3masoodNessuna valutazione finora
- Antenna BasicsDocumento32 pagineAntenna BasicsAniqa KhurshidNessuna valutazione finora
- River Club Phone Directory-Nov2011Documento50 pagineRiver Club Phone Directory-Nov2011Herb ZydneyNessuna valutazione finora
- Junos Enterprise Switching (JEX-21A)Documento3 pagineJunos Enterprise Switching (JEX-21A)nico_silalahi1Nessuna valutazione finora
- Filter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesDocumento17 pagineFilter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesAnonymous pS4LT2GJUSNessuna valutazione finora
- UPTU New Transcript 161015Documento2 pagineUPTU New Transcript 161015Anish Kumar0% (1)
- Digital Filter DesignDocumento37 pagineDigital Filter DesignAsmaa MosbehNessuna valutazione finora
- (Ims)Documento18 pagine(Ims)nikhilbagrecha3Nessuna valutazione finora
- Frequency Domain Filtering TechniquesDocumento53 pagineFrequency Domain Filtering Techniquesneoronic17100% (1)
- Filtering in Frequency Domain1Documento62 pagineFiltering in Frequency Domain1nandkishor joshiNessuna valutazione finora
- WINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-IDocumento35 pagineWINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-Ipadm kesavNessuna valutazione finora
- Frequency Domain Filtering MethodsDocumento59 pagineFrequency Domain Filtering MethodsMohammed AL-MaaitahNessuna valutazione finora
- DIP Chap 4 (Filtering in The Frequency Domain) Lect 11Documento45 pagineDIP Chap 4 (Filtering in The Frequency Domain) Lect 11kandeelllNessuna valutazione finora
- Frequency Domain Filtering Image ProcessingDocumento24 pagineFrequency Domain Filtering Image ProcessingSankalp_Kallakur_402100% (1)
- Frequency DomainDocumento71 pagineFrequency Domainsanju_arora19Nessuna valutazione finora
- Smoothing Frequency Domain FiltersDocumento22 pagineSmoothing Frequency Domain FiltersRaymond PraveenNessuna valutazione finora
- Image Sharpening Using Frequency Domain Filters: HP LPDocumento4 pagineImage Sharpening Using Frequency Domain Filters: HP LPAdonay YirgaNessuna valutazione finora
- Image Sharpening Using FDFDocumento4 pagineImage Sharpening Using FDFAdonay YirgaNessuna valutazione finora
- Relationship Between Spatial Interval & Frequency Intervals: © 2002 R. C. Gonzalez & R. E. WoodsDocumento16 pagineRelationship Between Spatial Interval & Frequency Intervals: © 2002 R. C. Gonzalez & R. E. WoodsanandbabugopathotiNessuna valutazione finora
- FIR DesignDocumento27 pagineFIR DesignBelachew AyaliewNessuna valutazione finora
- Filtering Images in the Frequency DomainDocumento35 pagineFiltering Images in the Frequency DomainKarthikeyaNessuna valutazione finora
- CS 450: High-Pass and Band-Pass FilteringDocumento17 pagineCS 450: High-Pass and Band-Pass Filteringbhoomi achalNessuna valutazione finora
- Lab 8Documento8 pagineLab 8alif fudenNessuna valutazione finora
- Image RestorationDocumento70 pagineImage RestorationJoelNessuna valutazione finora
- Image Enhancement in The FDDocumento22 pagineImage Enhancement in The FDImran BashaNessuna valutazione finora
- Image Enhancement in The Frequency DomainDocumento43 pagineImage Enhancement in The Frequency Domainmusicstand29Nessuna valutazione finora
- DIP Lecture 07Documento31 pagineDIP Lecture 07sanjila parvinNessuna valutazione finora
- Frequency Domain FiltersDocumento43 pagineFrequency Domain FiltersRakesh InaniNessuna valutazione finora
- Digital Image Smoothing and Sharpening FiltersDocumento35 pagineDigital Image Smoothing and Sharpening Filterssrinivas CVNessuna valutazione finora
- Unit - 2 - Part IIIDocumento63 pagineUnit - 2 - Part IIIkrishna chaitanyaNessuna valutazione finora
- Chapter 7 SlidesDocumento62 pagineChapter 7 Slideskwaleed717Nessuna valutazione finora
- Module 3 2 DZRkw8i1IXDocumento72 pagineModule 3 2 DZRkw8i1IXAEC OFFICIALNessuna valutazione finora
- Chapter 4B Part B: Digital Processing of Continuous-Time Signals Design of Analog FiltersDocumento3 pagineChapter 4B Part B: Digital Processing of Continuous-Time Signals Design of Analog FiltersAnonymous PkeI8e84RsNessuna valutazione finora
- FIR LectDocumento62 pagineFIR LectDepartment of Industrial ElectronicsNessuna valutazione finora
- Audio Processing Using MatlabDocumento12 pagineAudio Processing Using MatlabMuneeb IrfanNessuna valutazione finora
- Image Enhancement in The Frequency Domain: GZ Chapter 4Documento66 pagineImage Enhancement in The Frequency Domain: GZ Chapter 4ITTAPPA HATTIMANINessuna valutazione finora
- DF Lesson 02Documento78 pagineDF Lesson 02srirspNessuna valutazione finora
- Filtering in The Frequency DomainDocumento34 pagineFiltering in The Frequency DomainK.R.Raguram100% (1)
- Image Enhancement in The Frequency Domain: GZ Chapter 4Documento66 pagineImage Enhancement in The Frequency Domain: GZ Chapter 4Shabrin AhammedNessuna valutazione finora
- M.Phil (CSE) M.S UniversityDocumento37 pagineM.Phil (CSE) M.S UniversityRoshitha K0% (1)
- Freq Fil Expt 4Documento10 pagineFreq Fil Expt 4balaji sivaNessuna valutazione finora
- Unit 6 Filtering in Frequency DomainDocumento33 pagineUnit 6 Filtering in Frequency DomainAanathi mosaliNessuna valutazione finora
- Audio Sieving Using Signal FiltersDocumento19 pagineAudio Sieving Using Signal FiltersPiyush YadavNessuna valutazione finora
- Image Processing Ch4: Frequency Domain Filtering part2Documento47 pagineImage Processing Ch4: Frequency Domain Filtering part2saifNessuna valutazione finora
- From AM Radio To Digital I/Q ModulationDocumento57 pagineFrom AM Radio To Digital I/Q Modulationjtz00000Nessuna valutazione finora
- 2-RC Filter Circuits and LCR Resonance CircuitsDocumento13 pagine2-RC Filter Circuits and LCR Resonance CircuitsaxelNessuna valutazione finora
- SNM EE610 Upload 5Documento65 pagineSNM EE610 Upload 5Hardik KalasuaNessuna valutazione finora
- ECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduDocumento36 pagineECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduWikiNessuna valutazione finora
- Digital Image ProcessingDocumento39 pagineDigital Image Processingstar xNessuna valutazione finora
- Filtering LNDocumento43 pagineFiltering LNAgatha AstriseleNessuna valutazione finora
- Image Enhancement Frequency Domain TechniquesDocumento61 pagineImage Enhancement Frequency Domain Techniquessasindhur rNessuna valutazione finora
- FiltersDocumento31 pagineFiltersdjnidubeNessuna valutazione finora
- Experiment No. 4: Aim: Write A Program For Image Enhancement in Frequency Domain FilteringDocumento6 pagineExperiment No. 4: Aim: Write A Program For Image Enhancement in Frequency Domain Filtering13Manohar ChoudharyNessuna valutazione finora
- Module 3 Part CDocumento29 pagineModule 3 Part CshivubhavvNessuna valutazione finora
- Lec-2 Image Enhancement in The Frequency DomainDocumento74 pagineLec-2 Image Enhancement in The Frequency DomainravibabukancharlaNessuna valutazione finora
- Discrete Time Low Pass Filter DesignDocumento2 pagineDiscrete Time Low Pass Filter DesignshamuNessuna valutazione finora
- Image Enhancement - Frequency DomainDocumento33 pagineImage Enhancement - Frequency DomainKani MozhiNessuna valutazione finora
- Image Processing FrequencyDocumento55 pagineImage Processing FrequencyAhmed NadyNessuna valutazione finora
- FIR Digital Filters Design Using Fourier Series MethodDocumento85 pagineFIR Digital Filters Design Using Fourier Series MethodSourya DasguptaNessuna valutazione finora
- From AM to Digital IQ: Introduction to Wireless Network ModulationDocumento53 pagineFrom AM to Digital IQ: Introduction to Wireless Network ModulationMaggiNessuna valutazione finora
- DSP FiltersDocumento60 pagineDSP Filterspayalpaliwal014939Nessuna valutazione finora
- Mobile Radio Propagation EffectsDocumento35 pagineMobile Radio Propagation EffectsPriya DarshuNessuna valutazione finora
- Quantization: Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at AustinDocumento19 pagineQuantization: Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at AustinadarshNessuna valutazione finora
- Support 2021 P1Documento11 pagineSupport 2021 P1Remi LNessuna valutazione finora
- COMSATS University Islamabad (CUI) Sahiwal Campus: 1st Merit List of MS (Computer Science) ProgramDocumento2 pagineCOMSATS University Islamabad (CUI) Sahiwal Campus: 1st Merit List of MS (Computer Science) Programrao3farhat3masoodNessuna valutazione finora
- Service Manual AS26-35TB1HRADocumento48 pagineService Manual AS26-35TB1HRArao3farhat3masoodNessuna valutazione finora
- AbuZaydal Balkhi 002Documento77 pagineAbuZaydal Balkhi 002aaa100% (1)
- Wireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoDocumento4 pagineWireless Communication Using Hc-05 Bluetooth Module Interfaced With ArduinoAnifNessuna valutazione finora
- SmartClass Ethernet SellSheet Feb 2007Documento2 pagineSmartClass Ethernet SellSheet Feb 2007MichaelKwanNessuna valutazione finora
- CM1000ManualE OldDocumento116 pagineCM1000ManualE OldGreg WilliamsNessuna valutazione finora
- Lab41 ALS1 TT A CFGDocumento5 pagineLab41 ALS1 TT A CFGquangfetNessuna valutazione finora
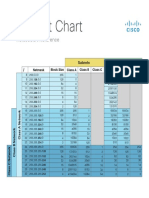
- IPv4 Subnetting Reference Chart PDFDocumento1 paginaIPv4 Subnetting Reference Chart PDFumermansoor715Nessuna valutazione finora
- Pages From Handbook On Satellite CommunicationsDocumento1 paginaPages From Handbook On Satellite Communicationsehsan koohkanNessuna valutazione finora
- RF G5 MCP English User Manual Version 1.2Documento21 pagineRF G5 MCP English User Manual Version 1.2alfredo.mqiNessuna valutazione finora
- IptvDocumento14 pagineIptvMasterin bitconNessuna valutazione finora
- Summary of InternetDocumento3 pagineSummary of InternetpisethforeverNessuna valutazione finora
- Iridium FixDocumento5 pagineIridium FixdanlefterNessuna valutazione finora
- Bticino PDFDocumento44 pagineBticino PDFahvNessuna valutazione finora
- Running Configrunning-ConfigDocumento4 pagineRunning Configrunning-ConfigmathurashwaniNessuna valutazione finora
- Accessories CatalogDocumento28 pagineAccessories CatalogJayachandran B. PillaiNessuna valutazione finora
- Data Sheet MarkTag Classic enDocumento2 pagineData Sheet MarkTag Classic enSamanNessuna valutazione finora
- Remote Access RF Modem Config 2.1Documento39 pagineRemote Access RF Modem Config 2.1Jhon GrandezNessuna valutazione finora
- Thompson ST536v6 ManualDocumento2 pagineThompson ST536v6 ManualcarnuscaedesNessuna valutazione finora
- Project Proposal For: Fortune Proposed Solution: CCTV Proposal DATE: February 27, 2020 SOLD TO: Mr. Andre ApostolDocumento3 pagineProject Proposal For: Fortune Proposed Solution: CCTV Proposal DATE: February 27, 2020 SOLD TO: Mr. Andre ApostolAndre ApostolNessuna valutazione finora
- Network Virtualization: Jennifer Rexford Advanced Computer NetworksDocumento23 pagineNetwork Virtualization: Jennifer Rexford Advanced Computer NetworksSrinivasan KrishnanNessuna valutazione finora
- Analysys Mason Polystar Whitepaper On VoLTE FINAL 1Documento13 pagineAnalysys Mason Polystar Whitepaper On VoLTE FINAL 1jrashevNessuna valutazione finora
- MXU BrochureDocumento2 pagineMXU BrochureNanobitul NanoNessuna valutazione finora
- 12121Documento19 pagine12121Karanvir SinghNessuna valutazione finora
- Provision of Caller Ring Back Tones For IP MultimediaDocumento6 pagineProvision of Caller Ring Back Tones For IP MultimediayasinNessuna valutazione finora
- A ZigBee-Based Home Automation SystemDocumento22 pagineA ZigBee-Based Home Automation Systemgeetz241Nessuna valutazione finora
- MPQ-ODV065R15B18J - DS - 1-0-1 Ong NuocDocumento1 paginaMPQ-ODV065R15B18J - DS - 1-0-1 Ong NuocJair CaballeroNessuna valutazione finora