Potrebbero piacerti anche
- Diseño de LevasDocumento22 pagineDiseño de LevasNacho GarroneNessuna valutazione finora
- Pregunta ExamenDocumento9 paginePregunta ExamenAmilcar RuizNessuna valutazione finora
- OCW Prob RodamientosDocumento16 pagineOCW Prob RodamientosBismarck Sernaque CordovaNessuna valutazione finora
- Ejerciciario de LevasDocumento2 pagineEjerciciario de LevasCuauhtemoc Mazon ValadezNessuna valutazione finora
- Elemento ResorteDocumento7 pagineElemento ResorteRicardo Gallarzo Jr.Nessuna valutazione finora
- A Examen Primer Parcial Teoría de MáquinasDocumento2 pagineA Examen Primer Parcial Teoría de MáquinasAdrian OxenfordNessuna valutazione finora
- Capitulo 12Documento9 pagineCapitulo 12Esja ModaEsjaNessuna valutazione finora
- Mecanismos ArticuladosDocumento8 pagineMecanismos ArticuladosMayelanie MendietaNessuna valutazione finora
- Velocidad RelativaDocumento7 pagineVelocidad RelativaIvan ZetinaNessuna valutazione finora
- Practica 2 Electronica AnalogicaDocumento12 paginePractica 2 Electronica AnalogicaChristian Eduardo Sanchez SandovalNessuna valutazione finora
- Coordenadas Cilíndricas 2019-IIDocumento18 pagineCoordenadas Cilíndricas 2019-IIPierre Esquivel LizanaNessuna valutazione finora
- Clasificación de Problemas en SintesisDocumento2 pagineClasificación de Problemas en SintesisJORGE ANTONIO PEREZ ROBLESNessuna valutazione finora
- P.T.V. en Sistemas de Barras Sometidas A FlexiónDocumento3 pagineP.T.V. en Sistemas de Barras Sometidas A FlexiónJorge RomeroNessuna valutazione finora
- Definición de LevasDocumento2 pagineDefinición de LevasNailet Morles100% (1)
- 3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosDocumento19 pagine3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosPedroNessuna valutazione finora
- Deber Unidad 1Documento10 pagineDeber Unidad 1Boris EspinozaNessuna valutazione finora
- Vectores Problemas de FuerzasDocumento2 pagineVectores Problemas de FuerzasdcadcNessuna valutazione finora
- Círculo de Mohr y Vigas Curvas en FlexiónDocumento10 pagineCírculo de Mohr y Vigas Curvas en FlexiónOmar Cobos ViguerasNessuna valutazione finora
- 2 ParcialDocumento4 pagine2 ParcialDAvudNessuna valutazione finora
- A.2.1 Eliasaf Castelan PechDocumento7 pagineA.2.1 Eliasaf Castelan PechEliasaf Castelan PechNessuna valutazione finora
- Trabajo Concentradores de Esfuerzos Diseño de MaquinasDocumento11 pagineTrabajo Concentradores de Esfuerzos Diseño de MaquinasAlex ArenasNessuna valutazione finora
- CINEMÁTICADocumento8 pagineCINEMÁTICACristhiam Flores ZavalaNessuna valutazione finora
- Problema Fatiga - ResueltoDocumento6 pagineProblema Fatiga - ResueltoAldairCedilloNessuna valutazione finora
- Examenes Resueltos Del Curso2010 2011-1Documento76 pagineExamenes Resueltos Del Curso2010 2011-1Nihad Zizaoui BachirNessuna valutazione finora
- Estado de Esfuerzos Principales 1Documento11 pagineEstado de Esfuerzos Principales 1Erik Quispe CruzNessuna valutazione finora
- Investigación Topología de MecanismosDocumento6 pagineInvestigación Topología de MecanismosFabián LaraNessuna valutazione finora
- 1.1.esfuerzo Por Carga Axial y Cortante Ramirez Perez Jorge IsraelDocumento5 pagine1.1.esfuerzo Por Carga Axial y Cortante Ramirez Perez Jorge IsraelTroskr Gallegos0% (1)
- Tema 7 Esfuerzo Combinados PDFDocumento32 pagineTema 7 Esfuerzo Combinados PDFFernando SolisNessuna valutazione finora
- Unidad 3. Vibraciones 2.0Documento34 pagineUnidad 3. Vibraciones 2.0Gerardo HernándezNessuna valutazione finora
- Diagrama Esfuerzo de Fatiga Número de CiclosDocumento3 pagineDiagrama Esfuerzo de Fatiga Número de CiclosMisael Vázquez PérezNessuna valutazione finora
- Engranajes Cónicos 1. IntroducciónDocumento11 pagineEngranajes Cónicos 1. IntroducciónJonathan Sandoval FernándezNessuna valutazione finora
- Actividad 4 OndasDocumento35 pagineActividad 4 OndasPanchoEsquivelRamirezNessuna valutazione finora
- Mecanismos RotacionalesDocumento8 pagineMecanismos Rotacionaleszorick sanchezNessuna valutazione finora
- Practica 9 Acumuladores HidraulicosDocumento8 paginePractica 9 Acumuladores HidraulicosCastle AlanNessuna valutazione finora
- A.4.1. Eliasaf Castelan PechDocumento5 pagineA.4.1. Eliasaf Castelan PechEliasaf Castelan PechNessuna valutazione finora
- Practica Con La Maquina UniversalDocumento10 paginePractica Con La Maquina UniversalEmilio Mock OlivasNessuna valutazione finora
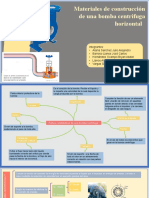
- Materialesde Construccion de Algunas Partes de Bomba Centrifuga HorizontalDocumento6 pagineMaterialesde Construccion de Algunas Partes de Bomba Centrifuga HorizontalAlejandro Vargas GonzalezNessuna valutazione finora
- 2.4 Variación de ParámetrosDocumento5 pagine2.4 Variación de ParámetrosomarNessuna valutazione finora
- ACFrOgA2fn04RdYqtG1pI2fLW - 0LcvuFaxIzLMcW2yiXWt8mMUPJYs9bTH1I7L40sGSpASsb qC7kc1KtdHMbYNgfQlSfm4ZXIJylczAKUAlW pAN1Pdi84 BXG5I7jBSWwTzFJ5yu8lfz5mNtYbDocumento21 pagineACFrOgA2fn04RdYqtG1pI2fLW - 0LcvuFaxIzLMcW2yiXWt8mMUPJYs9bTH1I7L40sGSpASsb qC7kc1KtdHMbYNgfQlSfm4ZXIJylczAKUAlW pAN1Pdi84 BXG5I7jBSWwTzFJ5yu8lfz5mNtYbDanyNessuna valutazione finora
- 6.-Análisis de Posición de Mecanismos Planos Por Métodos Gráfico y Analítico - Ramirez - Perez - Jorge - IsraelDocumento24 pagine6.-Análisis de Posición de Mecanismos Planos Por Métodos Gráfico y Analítico - Ramirez - Perez - Jorge - IsraelTroskr Gallegos0% (1)
- Números Eulerianos y La Ecuación de RicattiDocumento60 pagineNúmeros Eulerianos y La Ecuación de RicattiBruno DiazNessuna valutazione finora
- Reporte Técnico (Práctica Diseño de Levas)Documento20 pagineReporte Técnico (Práctica Diseño de Levas)Edgar Marcial PimentelNessuna valutazione finora
- Clase 3. Eslabones, Juntas y DiagramasDocumento29 pagineClase 3. Eslabones, Juntas y DiagramasRodneyNessuna valutazione finora
- 6 17Documento6 pagine6 17carlos regalado100% (1)
- Tornillos de PotenciaDocumento34 pagineTornillos de PotenciaVilkin RangelNessuna valutazione finora
- 1 - 5 DiseñoDocumento5 pagine1 - 5 DiseñoAshly QS100% (1)
- S2 - Mecanismos PDFDocumento29 pagineS2 - Mecanismos PDFchristianNessuna valutazione finora
- Esfuerzos CombinadosDocumento15 pagineEsfuerzos CombinadosLizz MorenoNessuna valutazione finora
- Clase10-Metrologia-Cadenas DimensionalesDocumento28 pagineClase10-Metrologia-Cadenas DimensionalesCiro Garcia RecioNessuna valutazione finora
- Bomba de Bloque DeslizanteDocumento12 pagineBomba de Bloque DeslizanteMiguel SánchezNessuna valutazione finora
- Actividad 1. Sistemas de Unidades y Prefijos.Documento4 pagineActividad 1. Sistemas de Unidades y Prefijos.Mastter Gamer0% (1)
- Cap1 Maquinas y Mecanismos Resumen ShigleyDocumento10 pagineCap1 Maquinas y Mecanismos Resumen ShigleyPascual MaldonadoNessuna valutazione finora
- S04.s1 - Análisis de Velocidad de Mecanismos-1 PDFDocumento64 pagineS04.s1 - Análisis de Velocidad de Mecanismos-1 PDFArmando Arnold Anchiraico SotoNessuna valutazione finora
- Ejercicio 8Documento6 pagineEjercicio 8Joseph CeballosNessuna valutazione finora
- Facultad de IngenieríaDocumento1 paginaFacultad de IngenieríaAgustín RemacheNessuna valutazione finora
- Diseño EjesDocumento7 pagineDiseño EjesDaniel Ochoa LopezNessuna valutazione finora
- Analisis Estocastico 2Documento17 pagineAnalisis Estocastico 2Luis Alberto Navarro JimenezNessuna valutazione finora
- VI Examen III Corte 20%Documento1 paginaVI Examen III Corte 20%Jose BarbozaNessuna valutazione finora
- Mecanismos Unidad 3 PDFDocumento65 pagineMecanismos Unidad 3 PDFGRACIELA ANDREA MEZA DENNISNessuna valutazione finora
- Diseño de LevasDocumento33 pagineDiseño de LevasJuandeDiosNessuna valutazione finora
- MOTIVACIÓNDocumento5 pagineMOTIVACIÓNJosé María Flores RojasNessuna valutazione finora
- Sesion 2º - 27-08 PDFDocumento2 pagineSesion 2º - 27-08 PDFJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Arquitectura Básica de Una Impresora 3DDocumento8 pagineArquitectura Básica de Una Impresora 3DJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Informe Diodo ...............Documento48 pagineInforme Diodo ...............Jesmil Antonio Dimas ZeñaNessuna valutazione finora
- LIDERAZGODocumento20 pagineLIDERAZGOJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Trenes de EngranajesDocumento39 pagineTrenes de EngranajesJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Dialnet FuncionesMatematicasParaQueSeUtilizan 2779659 PDFDocumento37 pagineDialnet FuncionesMatematicasParaQueSeUtilizan 2779659 PDFcelimo0710Nessuna valutazione finora
- AUTOCONTROLDocumento18 pagineAUTOCONTROLAnonymous wLJqDl5V5Nessuna valutazione finora
- Bandero LaDocumento1 paginaBandero LaJesmil Antonio Dimas ZeñaNessuna valutazione finora
- AlgoDocumento2 pagineAlgoJesmil Antonio Dimas ZeñaNessuna valutazione finora
- La Alianza ModernaDocumento5 pagineLa Alianza ModernaJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Ergonomia Vibraciones 2009Documento25 pagineErgonomia Vibraciones 2009Julian Avila del MoralNessuna valutazione finora
- MOTIVACIÓNDocumento5 pagineMOTIVACIÓNJosé María Flores RojasNessuna valutazione finora
- Qué Es La ComputaciónDocumento3 pagineQué Es La ComputaciónJesmil Antonio Dimas ZeñaNessuna valutazione finora
- EstaticaDocumento100 pagineEstaticaJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Jetstream Student TutorialDocumento13 pagineJetstream Student TutorialJulian Arevalo100% (1)
- La Alianza ModernaDocumento5 pagineLa Alianza ModernaJesmil Antonio Dimas ZeñaNessuna valutazione finora
- Las DrogasDocumento5 pagineLas DrogasJesmil Antonio Dimas ZeñaNessuna valutazione finora
- A Instructor Said Vargas Laboratorio 2 CDocumento7 pagineA Instructor Said Vargas Laboratorio 2 CBy CadizNessuna valutazione finora
- Informe - Fisica 2 12-09-2023Documento11 pagineInforme - Fisica 2 12-09-2023JOSE NICOLAS TUCTO YAPURANessuna valutazione finora
- Intro Ducci OnDocumento43 pagineIntro Ducci OnStephano Caro GuillenNessuna valutazione finora
- Elaboracion de TripticoDocumento3 pagineElaboracion de TripticoMelissa Molina TeranNessuna valutazione finora
- Informe 2fqDocumento6 pagineInforme 2fq___ASCENessuna valutazione finora
- Pca Fisica 3 BguDocumento11 paginePca Fisica 3 BguXiot QuimybiolNessuna valutazione finora
- BiomecanicaDocumento90 pagineBiomecanicaRicardo Gonzales100% (2)
- Memória Opel CorsaDocumento13 pagineMemória Opel CorsaCristian PliegoNessuna valutazione finora
- Tarea Diesel No.3Documento5 pagineTarea Diesel No.3casacaliente100% (1)
- Metodos de Analisis EstructuralDocumento3 pagineMetodos de Analisis EstructuralDaniel QuintanillaNessuna valutazione finora
- Elementos Finales de ControlDocumento4 pagineElementos Finales de ControlEmilio Contreras VieraNessuna valutazione finora
- Explicación de La Teoría de La Relatividad General de EinsteinDocumento3 pagineExplicación de La Teoría de La Relatividad General de EinsteinMussuline G. Tenorio ANessuna valutazione finora
- Diseño Hidr Agua Potable - La PampaDocumento14 pagineDiseño Hidr Agua Potable - La PampaJuan Carlos VilchezNessuna valutazione finora
- 04 Dinámica de La Partícula (GIE)Documento74 pagine04 Dinámica de La Partícula (GIE)CentipedeWormNessuna valutazione finora
- CLASE - Destilacion BinariaDocumento45 pagineCLASE - Destilacion BinariaNavaBurgosCleverCristianNessuna valutazione finora
- E T Particulares Tubería HdpeDocumento13 pagineE T Particulares Tubería HdpeDiego Dias GarciaNessuna valutazione finora
- Semana 7Documento13 pagineSemana 7Leonardo Francisco Sanchez GuerreroNessuna valutazione finora
- Anexo BP Especificaciones Particulares (VF)Documento328 pagineAnexo BP Especificaciones Particulares (VF)Ver0190% (1)
- Impulso y Cantidad de MovimientoDocumento13 pagineImpulso y Cantidad de MovimientoJuan Manuel Guzman AlmeidaNessuna valutazione finora
- Analisi Convección ForzadaDocumento2 pagineAnalisi Convección Forzadaerika salinasNessuna valutazione finora
- Fs 8060061Documento1 paginaFs 8060061Yeferson ArcasNessuna valutazione finora
- Medidores de Nivel y Flujo (Instrumentacion y Control)Documento20 pagineMedidores de Nivel y Flujo (Instrumentacion y Control)michoNessuna valutazione finora
- Ciclos Otto Diesel Stirling BraytonDocumento20 pagineCiclos Otto Diesel Stirling BraytonHadri Yam LunacNessuna valutazione finora
- Sistema Transmision Del AutoDocumento2 pagineSistema Transmision Del AutoEscuela4235100% (1)
- Ejercicios de Transferencia de CalorDocumento11 pagineEjercicios de Transferencia de CalorValve Anton V RNessuna valutazione finora
- Parcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Procesos Industriales - (Grupo b03)Documento13 pagineParcial - Escenario 4 - Primer Bloque-Teorico - Practico - Virtual - Procesos Industriales - (Grupo b03)Yojan Mateo Rojas PulidoNessuna valutazione finora
- Flexión, Cortante y Torsión en VigasDocumento8 pagineFlexión, Cortante y Torsión en VigasJulio César LópezNessuna valutazione finora
- Especificaciones Daikin ACQS-FDocumento1 paginaEspecificaciones Daikin ACQS-FGiulio NanniNessuna valutazione finora