Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Feasibility Study Notes Revised PDFDocumento10 pagineFeasibility Study Notes Revised PDFGilbert BettNessuna valutazione finora
- K. Deergha Rao - Signals and Systems (2018, Birkhäuser) - 2Documento434 pagineK. Deergha Rao - Signals and Systems (2018, Birkhäuser) - 2Eugenie medaNessuna valutazione finora
- FGRU URAN 08.12.2015 Rev.02Documento3 pagineFGRU URAN 08.12.2015 Rev.02Hitendra PanchalNessuna valutazione finora
- SMA Inverter Catalogue PDFDocumento290 pagineSMA Inverter Catalogue PDFxodewaNessuna valutazione finora
- Research Proposal GuidelinesDocumento8 pagineResearch Proposal Guidelineskomal khalidNessuna valutazione finora
- Self-Regulated Learning - Where We Are TodayDocumento13 pagineSelf-Regulated Learning - Where We Are Todayvzzvnumb100% (1)
- MBR Presentation LatestDocumento12 pagineMBR Presentation LatestRuchi GuptaNessuna valutazione finora
- PAC4200 Product GuideDocumento4 paginePAC4200 Product GuideHugo Alberto Malespin SolisNessuna valutazione finora
- Indian Standard: Stationary Valve Regulated Lead Acid Batteries - SpecificationDocumento12 pagineIndian Standard: Stationary Valve Regulated Lead Acid Batteries - Specificationmukesh_kht1Nessuna valutazione finora
- GCCDocumento265 pagineGCCzhenguoliNessuna valutazione finora
- Security Issues in Modern Automotive Systems: Patrick NischDocumento6 pagineSecurity Issues in Modern Automotive Systems: Patrick NischEdson PatrícioNessuna valutazione finora
- Orion Manual - Chess Pairing Software For Team Tournament - VegaChessDocumento46 pagineOrion Manual - Chess Pairing Software For Team Tournament - VegaChessVictor FeitosaNessuna valutazione finora
- Cfe Exam Review Course - December 2020 - VirtualDocumento4 pagineCfe Exam Review Course - December 2020 - VirtualSeck OusseynouAliouneNessuna valutazione finora
- Solenoid ValvesDocumento23 pagineSolenoid ValvesmcsecNessuna valutazione finora
- Gardenia RedddDocumento44 pagineGardenia RedddYasmin Yvonne De Chavez100% (1)
- BS en 00480-6-2005 PDFDocumento8 pagineBS en 00480-6-2005 PDFShan Sandaruwan AbeywardeneNessuna valutazione finora
- Cembrit Patina Design Line - LowresDocumento11 pagineCembrit Patina Design Line - LowresRaul AntonieNessuna valutazione finora
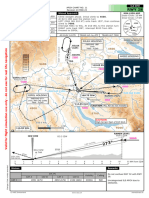
- LSZH Apch11 Rwy28 IlsDocumento1 paginaLSZH Apch11 Rwy28 Ilssamykarim2009Nessuna valutazione finora
- Case Study of Improving Productivity in Warehouse WorkDocumento5 pagineCase Study of Improving Productivity in Warehouse WorkRohan SharmaNessuna valutazione finora
- Project TimesheetDocumento2 pagineProject TimesheetAmanpreet SinghNessuna valutazione finora
- LibisDocumento39 pagineLibisAngelika CalingasanNessuna valutazione finora
- Adnan PDFDocumento3 pagineAdnan PDFmudassarhussainNessuna valutazione finora
- AcknowledgementDocumento4 pagineAcknowledgementPurna GuptaNessuna valutazione finora
- Opoc Engine ReportDocumento34 pagineOpoc Engine Reportapi-32792277367% (3)
- 1 1 6 Blood Splatter Analysis Experimental DesignDocumento4 pagine1 1 6 Blood Splatter Analysis Experimental Designapi-343751193100% (1)
- Advantages of Group Decision MakingDocumento1 paginaAdvantages of Group Decision MakingYasmeen ShamsiNessuna valutazione finora
- Tds Cross 0325Documento1 paginaTds Cross 0325manox007Nessuna valutazione finora
- ActiveScale P100 Installation GuideDocumento97 pagineActiveScale P100 Installation GuideZhou QianNessuna valutazione finora
- (DOC) Makalah Sistem Endokrin - YENNA PUTRI - Academia - Edu183414Documento13 pagine(DOC) Makalah Sistem Endokrin - YENNA PUTRI - Academia - Edu183414dominggus kakaNessuna valutazione finora