Potrebbero piacerti anche
- Inequalities for Differential and Integral EquationsDa EverandInequalities for Differential and Integral EquationsNessuna valutazione finora
- Matrices and Linear AlgebraDocumento258 pagineMatrices and Linear AlgebraHarshal VaidyaNessuna valutazione finora
- SVD PDFDocumento10 pagineSVD PDFAkshat RastogiNessuna valutazione finora
- SHURMAN Multivariable CalculusDocumento523 pagineSHURMAN Multivariable Calculusstevi2896Nessuna valutazione finora
- AP Calculus AB: Free-Response QuestionsDocumento7 pagineAP Calculus AB: Free-Response QuestionsAman NAGUNessuna valutazione finora
- MA1000 Lecture NotesDocumento189 pagineMA1000 Lecture NotesVeeNessuna valutazione finora
- Math 55aDocumento68 pagineMath 55aMinh TieuNessuna valutazione finora
- 2016 Complex Analysis Problems SolutionsDocumento102 pagine2016 Complex Analysis Problems Solutionsas_5kNessuna valutazione finora
- Fixed Points Yu A ShashkinDocumento2 pagineFixed Points Yu A ShashkinsohrabNessuna valutazione finora
- Lucio Boccardo, Gisella Croce - Elliptic Partial Differential Equations-De Gruyter (2013)Documento204 pagineLucio Boccardo, Gisella Croce - Elliptic Partial Differential Equations-De Gruyter (2013)Amanda Clara ArrudaNessuna valutazione finora
- Notes On Social Choice and Mechanism Design Econ 8104, Spring 2009, Kim Sau ChungDocumento27 pagineNotes On Social Choice and Mechanism Design Econ 8104, Spring 2009, Kim Sau ChungMegan JohnstonNessuna valutazione finora
- Sums of Two Squares: Pete L. ClarkDocumento7 pagineSums of Two Squares: Pete L. Clarkماجد اسماعيل سميرNessuna valutazione finora
- Infinite Sequences and SeriesDocumento105 pagineInfinite Sequences and Seriesnarukiz100% (1)
- Problems of Vector SpacesDocumento3 pagineProblems of Vector SpacesRaulNessuna valutazione finora
- Probability and Geometry On Groups Lecture Notes For A Graduate CourseDocumento209 pagineProbability and Geometry On Groups Lecture Notes For A Graduate CourseChristian Bazalar SalasNessuna valutazione finora
- Notes On Homological AlgebraDocumento118 pagineNotes On Homological AlgebraΠΤΟΛΕΜΑΙΟΣ ΗΡΑΚΛΕΙΔΗΣNessuna valutazione finora
- A Closed Form Solution of The Two Body Problem in Non-Inertial Reference FramesDocumento20 pagineA Closed Form Solution of The Two Body Problem in Non-Inertial Reference Framesshakir hussainNessuna valutazione finora
- Linear Algebra - Bypaul DawkinsDocumento343 pagineLinear Algebra - Bypaul Dawkinssd1642Nessuna valutazione finora
- Master Thesis Optical Properties of Pentacene and Picene: University of The Basque Country WWW - Mscnano.euDocumento51 pagineMaster Thesis Optical Properties of Pentacene and Picene: University of The Basque Country WWW - Mscnano.euAnonymous oSuBJMNessuna valutazione finora
- Getting Started With MATLAB: NotesDocumento27 pagineGetting Started With MATLAB: Notesjsinghdrdo100% (3)
- Physics - Introduction To Differential Geometry and General RelativityDocumento128 paginePhysics - Introduction To Differential Geometry and General RelativityJunior100% (2)
- A Tutorial On Principal Component AnalysisDocumento29 pagineA Tutorial On Principal Component AnalysisrigastiNessuna valutazione finora
- Stochastic Processes NotesDocumento22 pagineStochastic Processes Notesels_872100% (1)
- Two Body Problem PDFDocumento25 pagineTwo Body Problem PDFHanan Z Amin100% (1)
- Fermat's Little Theorem (Some Proofs)Documento12 pagineFermat's Little Theorem (Some Proofs)Soumyajit PradhanNessuna valutazione finora
- Finite symmetric groupsDocumento10 pagineFinite symmetric groupsArohi Parlikar100% (1)
- GroupDocumento343 pagineGroupDiana Uriza100% (2)
- Math 110 Multivariate Calculus 1 PDFDocumento4 pagineMath 110 Multivariate Calculus 1 PDFassa saasNessuna valutazione finora
- Ayesha Ali 2016-B-Math-010: Cubic Spline InterpolationDocumento12 pagineAyesha Ali 2016-B-Math-010: Cubic Spline InterpolationMaryam BibiNessuna valutazione finora
- Math for Econ Lecture NotesDocumento105 pagineMath for Econ Lecture Noteshadi.salami3684Nessuna valutazione finora
- MATH2045: Vector Calculus & Complex Variable TheoryDocumento50 pagineMATH2045: Vector Calculus & Complex Variable TheoryAnonymous 8nJXGPKnuW100% (2)
- The Arithmetic of Z-Numbers - Theory and Applications - Rafik A. Aliev PDFDocumento316 pagineThe Arithmetic of Z-Numbers - Theory and Applications - Rafik A. Aliev PDFJose AlvaradoNessuna valutazione finora
- Multi Linear Algebra PDFDocumento173 pagineMulti Linear Algebra PDFImraansNessuna valutazione finora
- Probability and Random Number A First Guide To RandomnessDocumento136 pagineProbability and Random Number A First Guide To RandomnessVinko ZaninovićNessuna valutazione finora
- Hilbert Spaces BasicsDocumento28 pagineHilbert Spaces BasicsChernet TugeNessuna valutazione finora
- Large Networks and Graph LimitsDocumento487 pagineLarge Networks and Graph Limitsanon020202100% (2)
- CVISION PDFCompressor Evaluation for PDF Compression, OCR, Web OptimizationDocumento153 pagineCVISION PDFCompressor Evaluation for PDF Compression, OCR, Web OptimizationFis MatNessuna valutazione finora
- Statistics HandbookDocumento109 pagineStatistics HandbookfoofoolNessuna valutazione finora
- 1.4 Muon PhysicDocumento19 pagine1.4 Muon PhysicExfalNessuna valutazione finora
- Differentialequations, Dynamicalsystems, and Anintroduction TochaosDocumento416 pagineDifferentialequations, Dynamicalsystems, and Anintroduction TochaoszhangwenNessuna valutazione finora
- Functions of Several Variables2Documento5 pagineFunctions of Several Variables2ngothaiquynhNessuna valutazione finora
- (Springer Series in Statistics) Jun Shao, Dongsheng Tu (Auth.) - The Jackknife and Bootstrap-Springer-Verlag New York (1995)Documento532 pagine(Springer Series in Statistics) Jun Shao, Dongsheng Tu (Auth.) - The Jackknife and Bootstrap-Springer-Verlag New York (1995)sherlockholmes108Nessuna valutazione finora
- Stat 230 NotesDocumento248 pagineStat 230 NotesThomas JosephNessuna valutazione finora
- Diffie-Hellman Key ExchangeDocumento22 pagineDiffie-Hellman Key ExchangesubburajsNessuna valutazione finora
- Comments On The Savitzky Golay Convolution Method For Least Squares Fit Smoothing and Differentiation of Digital DataDocumento4 pagineComments On The Savitzky Golay Convolution Method For Least Squares Fit Smoothing and Differentiation of Digital DataHéctor F BonillaNessuna valutazione finora
- (Series in Analysis 3) S. Kesavan-Symmetrization & Applications-World Scientific (2006)Documento162 pagine(Series in Analysis 3) S. Kesavan-Symmetrization & Applications-World Scientific (2006)Anonymous j46G01P3Nessuna valutazione finora
- Onishchik, A. L. Lectures On Real Semisimple Lie Algebras and Ther RerpesentationsDocumento96 pagineOnishchik, A. L. Lectures On Real Semisimple Lie Algebras and Ther RerpesentationsEmilio Salcedo MartínezNessuna valutazione finora
- MA338 Differentiable Manifolds and Lie Groups NotesDocumento98 pagineMA338 Differentiable Manifolds and Lie Groups NotesValdir MendesNessuna valutazione finora
- Yunshu InformationGeometry PDFDocumento79 pagineYunshu InformationGeometry PDFmatrazziNessuna valutazione finora
- Myths and Counterexamples in Mathematical ProgrammingDocumento215 pagineMyths and Counterexamples in Mathematical ProgrammingPedro DíazNessuna valutazione finora
- Integral and Finite Difference Inequalities and ApplicationsDa EverandIntegral and Finite Difference Inequalities and ApplicationsNessuna valutazione finora
- Introduction to the Theory of Linear Partial Differential EquationsDa EverandIntroduction to the Theory of Linear Partial Differential EquationsNessuna valutazione finora
- Mathematical Methods: Linear Algebra / Normed Spaces / Distributions / IntegrationDa EverandMathematical Methods: Linear Algebra / Normed Spaces / Distributions / IntegrationNessuna valutazione finora
- Low-Rank Models in Visual Analysis: Theories, Algorithms, and ApplicationsDa EverandLow-Rank Models in Visual Analysis: Theories, Algorithms, and ApplicationsNessuna valutazione finora
- Introduction to Group Theory with Applications: Materials Science and TechnologyDa EverandIntroduction to Group Theory with Applications: Materials Science and TechnologyValutazione: 1 su 5 stelle1/5 (1)
- Introduction To Model Order Reduction: I.2.b Assembling Models From Partial Differential Equation SolversDocumento45 pagineIntroduction To Model Order Reduction: I.2.b Assembling Models From Partial Differential Equation SolversDaniel KozakevichNessuna valutazione finora
- Functions of A Complex Variable (S1) : Trinity Term 2012 Lecturer: F HautmannDocumento13 pagineFunctions of A Complex Variable (S1) : Trinity Term 2012 Lecturer: F HautmannDaniel KozakevichNessuna valutazione finora
- Elementary Differential Equations-BoyceDocumento39 pagineElementary Differential Equations-BoyceNurul HanifahNessuna valutazione finora
- 02 CH 1 Intro DEDocumento18 pagine02 CH 1 Intro DEhtpatel_2015455Nessuna valutazione finora
- Matlab Tutorial3Documento37 pagineMatlab Tutorial3Asterix100% (10)
- Fundamental Theorem of Calculus: Connects Indefinite and Definite IntegralsDocumento15 pagineFundamental Theorem of Calculus: Connects Indefinite and Definite IntegralsDaniel KozakevichNessuna valutazione finora
- Poster Ismrm 2015 VCR JFN KSN Jlac RevDocumento1 paginaPoster Ismrm 2015 VCR JFN KSN Jlac RevDaniel KozakevichNessuna valutazione finora
- Digitalizado 11082019 034711Documento3 pagineDigitalizado 11082019 034711Daniel KozakevichNessuna valutazione finora
- Fundamental Theorem of Calculus: Connects Indefinite and Definite IntegralsDocumento15 pagineFundamental Theorem of Calculus: Connects Indefinite and Definite IntegralsDaniel KozakevichNessuna valutazione finora
- FToC and MVT 2Documento29 pagineFToC and MVT 2Daniel KozakevichNessuna valutazione finora
- The Definite Integral and The Fundamental Theorem of CalculusDocumento18 pagineThe Definite Integral and The Fundamental Theorem of CalculusDaniel KozakevichNessuna valutazione finora
- 33002581M PDFDocumento44 pagine33002581M PDFDaniel KozakevichNessuna valutazione finora
- InTech-Assessment of Carotid Flow Using Magnetic Resonance Imaging and Computational Fluid DynamicsDocumento24 pagineInTech-Assessment of Carotid Flow Using Magnetic Resonance Imaging and Computational Fluid DynamicsDaniel KozakevichNessuna valutazione finora
- The Definite Integral and The Fundamental Theorem of CalculusDocumento18 pagineThe Definite Integral and The Fundamental Theorem of CalculusDaniel KozakevichNessuna valutazione finora
- Answer Key - Practice Test 1 PDFDocumento6 pagineAnswer Key - Practice Test 1 PDFKsesshumaru DemonNessuna valutazione finora
- Table of ContentDocumento4 pagineTable of ContentalexoundpcNessuna valutazione finora
- ch02 (Linear Algebra)Documento8 paginech02 (Linear Algebra)Daniel KozakevichNessuna valutazione finora
- Linalg PDFDocumento196 pagineLinalg PDFmjmatinfNessuna valutazione finora
- Ch02 (Linear Algebra)Documento11 pagineCh02 (Linear Algebra)Daniel KozakevichNessuna valutazione finora
- ch02 (Linear Algebra)Documento8 paginech02 (Linear Algebra)Daniel KozakevichNessuna valutazione finora
- F: S C Z X + Iy F (Z) U (X, Y) + IV (X, Y) : Ii. Complex DifferentiationDocumento9 pagineF: S C Z X + Iy F (Z) U (X, Y) + IV (X, Y) : Ii. Complex DifferentiationDaniel KozakevichNessuna valutazione finora
- 3.IV. MatrixOperationsDocumento26 pagine3.IV. MatrixOperationsDaniel KozakevichNessuna valutazione finora
- Howard Anton All Rights ReservedDocumento21 pagineHoward Anton All Rights ReservedDaniel KozakevichNessuna valutazione finora
- The Inverse of A MatrixDocumento10 pagineThe Inverse of A MatrixDaniel KozakevichNessuna valutazione finora
- Linear Combinations Can Be Viewed As A Matrix-Vector MultiplicationDocumento9 pagineLinear Combinations Can Be Viewed As A Matrix-Vector MultiplicationDaniel KozakevichNessuna valutazione finora
- Row Reduction (Matrix)Documento2 pagineRow Reduction (Matrix)Daniel KozakevichNessuna valutazione finora
- 4.2 Null Spaces, Column Spaces, & Linear Transformations: M A A A A ADocumento6 pagine4.2 Null Spaces, Column Spaces, & Linear Transformations: M A A A A ASceptic GrannyNessuna valutazione finora
- Section 1.2: Row Reduction and Echelon Forms Echelon Form (Or Row Echelon Form)Documento13 pagineSection 1.2: Row Reduction and Echelon Forms Echelon Form (Or Row Echelon Form)alyhamad50Nessuna valutazione finora
- Row Reduction (Matrix)Documento2 pagineRow Reduction (Matrix)Daniel KozakevichNessuna valutazione finora
- LogiquidsDocumento2 pagineLogiquidsAloma FonsecaNessuna valutazione finora
- PC Poles: DescriptionDocumento2 paginePC Poles: DescriptionSantoso SantNessuna valutazione finora
- Strategic Management Plan analyzing Unilever's macro and micro environmentsDocumento17 pagineStrategic Management Plan analyzing Unilever's macro and micro environmentsMd Moshiul HaqueNessuna valutazione finora
- Digestion Unit 1 QDocumento15 pagineDigestion Unit 1 QKajana Sivarasa ShenthanNessuna valutazione finora
- Fatigue Life Prediction of A320-200 Aileron Lever Structure of A Transport AircraftDocumento4 pagineFatigue Life Prediction of A320-200 Aileron Lever Structure of A Transport AircraftMohamed IbrahimNessuna valutazione finora
- Forklift Truck Risk AssessmentDocumento2 pagineForklift Truck Risk AssessmentAshis Das100% (1)
- Datasheet Optris XI 410Documento2 pagineDatasheet Optris XI 410davidaldamaNessuna valutazione finora
- Desiderata: by Max EhrmannDocumento6 pagineDesiderata: by Max EhrmannTanay AshwathNessuna valutazione finora
- OE Spec MTU16V4000DS2250 3B FC 50Hz 1 18Documento6 pagineOE Spec MTU16V4000DS2250 3B FC 50Hz 1 18Rizki Heru HermawanNessuna valutazione finora
- Chemistry 12: Provincial ExaminationDocumento25 pagineChemistry 12: Provincial ExaminationCát TriệuNessuna valutazione finora
- Contact GRRSB Team for InquiriesDocumento2 pagineContact GRRSB Team for Inquiriesmsis81Nessuna valutazione finora
- Beckman DxI 800 Prolactin Assay Superiority for Monomeric ProlactinDocumento5 pagineBeckman DxI 800 Prolactin Assay Superiority for Monomeric Prolactindoxy20Nessuna valutazione finora
- Uji Deteksi Biofilm Dari Isolat Klinik Kateter Urin Bakteri Entercoccus Dibandingkan Dengan Tube MethodDocumento27 pagineUji Deteksi Biofilm Dari Isolat Klinik Kateter Urin Bakteri Entercoccus Dibandingkan Dengan Tube MethodIyannyanNessuna valutazione finora
- Ninoy Aquino Parks and Wildlife CenterDocumento7 pagineNinoy Aquino Parks and Wildlife CenterNinia Richelle Angela AgaNessuna valutazione finora
- Lesson 1 - Simple StressDocumento5 pagineLesson 1 - Simple StressJohn Philip NadalNessuna valutazione finora
- Dimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutDocumento11 pagineDimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutRizqi RamadhanNessuna valutazione finora
- Ch3 XII SolutionsDocumento12 pagineCh3 XII SolutionsSaish NaikNessuna valutazione finora
- 37th APSDC Scientific PresentationsDocumento7 pagine37th APSDC Scientific PresentationsSatyendra KumarNessuna valutazione finora
- IotDocumento88 pagineIotLalithyaNessuna valutazione finora
- Earth and Life Science DLLDocumento6 pagineEarth and Life Science DLLGsoon Sibulan100% (3)
- Cooling System Exhaust System: RadiatorDocumento2 pagineCooling System Exhaust System: RadiatorMd ShNessuna valutazione finora
- DGPS Sensor JLR-4331W Instruction ManualDocumento42 pagineDGPS Sensor JLR-4331W Instruction ManualantonioNessuna valutazione finora
- LOD Spec 2016 Part I 2016-10-19 PDFDocumento207 pagineLOD Spec 2016 Part I 2016-10-19 PDFzakariazulkifli92Nessuna valutazione finora
- NASA Technical Mem Randum: E-Flutter N78Documento17 pagineNASA Technical Mem Randum: E-Flutter N78gfsdg dfgNessuna valutazione finora
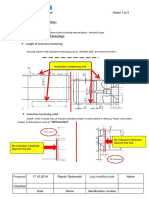
- Induction Hardening - Interpretation of Drawing & Testing PDFDocumento4 pagineInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHNessuna valutazione finora
- Finals-Insurance Week 5Documento19 pagineFinals-Insurance Week 5Ryan ChristianNessuna valutazione finora
- White Paper Without Track ChangesDocumento7 pagineWhite Paper Without Track Changesapi-609064761Nessuna valutazione finora
- Presentation For Partial Fulfillment of The Diploma in Occupational Safety and HealthDocumento16 paginePresentation For Partial Fulfillment of The Diploma in Occupational Safety and HealthmarinaNessuna valutazione finora
- Is Revalida ExamDocumento11 pagineIs Revalida ExamRodriguez, Jhe-ann M.Nessuna valutazione finora
- Fendering For Tugs: Mike Harrison, Trelleborg Marine Systems, UKDocumento5 pagineFendering For Tugs: Mike Harrison, Trelleborg Marine Systems, UKRizal RachmanNessuna valutazione finora