Potrebbero piacerti anche
- Tarea Practica Reactivos 4Documento6 pagineTarea Practica Reactivos 4Daniel RomeroNessuna valutazione finora
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricDa EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricNessuna valutazione finora
- Coordenadas Esféricas y CilindricasDocumento17 pagineCoordenadas Esféricas y CilindricasJean Carlos Santisteban CapuñayNessuna valutazione finora
- Algebra Geometria 18 PDFDocumento1 paginaAlgebra Geometria 18 PDFAlexander CampoverdeNessuna valutazione finora
- Notas Familias ParamétricasDocumento12 pagineNotas Familias ParamétricasCarlos CañizaresNessuna valutazione finora
- MapaDocumento1 paginaMapaWai DiNessuna valutazione finora
- Tabla de Conversión de Unidades FísicasDocumento2 pagineTabla de Conversión de Unidades FísicasjoseNessuna valutazione finora
- Solución Numérica Ecuaciones No LinealesDocumento26 pagineSolución Numérica Ecuaciones No LinealesDaniel G Canton PuertoNessuna valutazione finora
- Energía MecánicaDocumento4 pagineEnergía MecánicaOswa QuejNessuna valutazione finora
- Lista de Ejercicios de Algebra EsfmDocumento5 pagineLista de Ejercicios de Algebra EsfmFernando Moreno GomezNessuna valutazione finora
- ElectromagnetismoDocumento7 pagineElectromagnetismoLuis Eduardo MarquezNessuna valutazione finora
- Formulario Fisica ClasicaDocumento3 pagineFormulario Fisica ClasicaAram VanditNessuna valutazione finora
- Vectores de Proyeccion Ejercicios ResueltosDocumento2 pagineVectores de Proyeccion Ejercicios ResueltosyandreshernandezNessuna valutazione finora
- Eva. Recuperativa de Trabajo y Energía Ruben AlejandroDocumento3 pagineEva. Recuperativa de Trabajo y Energía Ruben AlejandroRuben Alejandro Rondon UzcateguiNessuna valutazione finora
- Examen Calculo y Dinamica Unidad 1Documento2 pagineExamen Calculo y Dinamica Unidad 1Vale RamirezNessuna valutazione finora
- 4 - Guía ArreglosDocumento15 pagine4 - Guía ArreglosRicardo OliveraNessuna valutazione finora
- Examen de Modelos Lineales AvanzadosDocumento4 pagineExamen de Modelos Lineales AvanzadosJOSE CARLOS BALLENA CANAZANessuna valutazione finora
- Cargas en Maquinas RotativasDocumento5 pagineCargas en Maquinas RotativasEdag GadeNessuna valutazione finora
- Practica 5 - Estequiometría de Las Reacciones Parte 1Documento10 paginePractica 5 - Estequiometría de Las Reacciones Parte 1C JNessuna valutazione finora
- Práctica 1 Calculo IntegralDocumento3 paginePráctica 1 Calculo IntegralDelfino OlivaresNessuna valutazione finora
- Silabo Química General ESMH 2022 I Versión PreliminarDocumento8 pagineSilabo Química General ESMH 2022 I Versión Preliminaryessenia apaza mamaniNessuna valutazione finora
- Movimiento RotacionalDocumento3 pagineMovimiento RotacionalJORGE ANDRES ARIAS BATALLASNessuna valutazione finora
- Tema 4. CinemáticaDocumento18 pagineTema 4. CinemáticaIsabel FerrairóNessuna valutazione finora
- Practica #4 Simulación Del Modelo de Un Motor EléctricoDocumento8 paginePractica #4 Simulación Del Modelo de Un Motor EléctricoEduardo RamirezNessuna valutazione finora
- Solidos de Revolucion, EtcDocumento14 pagineSolidos de Revolucion, EtcUziel BlancoNessuna valutazione finora
- Ejercicio 06Documento23 pagineEjercicio 06Dante P. Caso100% (1)
- FS3Documento20 pagineFS3Alejandra Miranda DíazNessuna valutazione finora
- Aplicaciones de MatricesDocumento5 pagineAplicaciones de MatricesJose VeronaNessuna valutazione finora
- Fisica 10 - Freddy yDocumento11 pagineFisica 10 - Freddy yLuz Mercedes Rugeles Gelvez100% (2)
- Apuntes Disenþo de ExperimentosDocumento70 pagineApuntes Disenþo de ExperimentosGustavo Bautista100% (1)
- Ejercicios de Tiro ParabolicoDocumento4 pagineEjercicios de Tiro ParabolicoBryanTANessuna valutazione finora
- 13 Aplicaciones de La TrigonometriaDocumento5 pagine13 Aplicaciones de La TrigonometriaRichard CruzNessuna valutazione finora
- Cristales LíquidosDocumento5 pagineCristales LíquidosWalter SilvaNessuna valutazione finora
- Radioactiviad y Estabilidad NuclearDocumento2 pagineRadioactiviad y Estabilidad NuclearProf. Ignacio CaggianoNessuna valutazione finora
- Formación de Las Bandas de Impurezas en Semiconductores Altamente Dopados (Andy Maelo)Documento7 pagineFormación de Las Bandas de Impurezas en Semiconductores Altamente Dopados (Andy Maelo)Andy MaeloNessuna valutazione finora
- Estatica Primer Examen - Tarea PDFDocumento6 pagineEstatica Primer Examen - Tarea PDFLuis Antonio CastilloNessuna valutazione finora
- Aplicación Del Modelo Económico de Las Matrices de LeontiefDocumento11 pagineAplicación Del Modelo Económico de Las Matrices de LeontiefSandra0% (1)
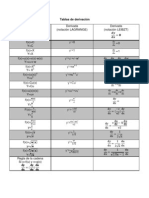
- Formulario de DerivadasDocumento1 paginaFormulario de DerivadasMiguel Lopez100% (1)
- POLINOMIOSDocumento12 paginePOLINOMIOSHector EduardoNessuna valutazione finora
- Métodos Abiertos.Documento9 pagineMétodos Abiertos.oscarcbz50% (2)
- ESTEQUIOMETRIADocumento21 pagineESTEQUIOMETRIAIsaac MejíaNessuna valutazione finora
- FRICCIONDocumento14 pagineFRICCIONLidia Zla100% (1)
- La Derivada Como Modelo MatemáticoDocumento9 pagineLa Derivada Como Modelo Matemáticojquesadam20035513100% (1)
- Guias de FarmDocumento8 pagineGuias de FarmMaxi SNessuna valutazione finora
- Cinematica de Una Particula 1Documento70 pagineCinematica de Una Particula 1Marii Ramirez SosaNessuna valutazione finora
- Retícula MecatronicaDocumento1 paginaRetícula MecatronicaMario Pérez CamposNessuna valutazione finora
- Metrologia TermicaDocumento4 pagineMetrologia Termicapepebero11100% (1)
- Coeficiente de Dilatacion Lineal CompletoDocumento15 pagineCoeficiente de Dilatacion Lineal CompletoRichard PeñaNessuna valutazione finora
- Cristales Liquidos PropiedadesDocumento12 pagineCristales Liquidos PropiedadesJosue Raul Ramirez PaulinoNessuna valutazione finora
- DINÁMICA - Banco (Mov. Curvilíneo)Documento6 pagineDINÁMICA - Banco (Mov. Curvilíneo)Omar Deyvi Siesquen ZeñaNessuna valutazione finora
- Calculo IntegralDocumento4 pagineCalculo Integraljprada16100% (3)
- Ensayo de FlexionDocumento3 pagineEnsayo de FlexionJeniffer TrianaNessuna valutazione finora
- Práctica 3Documento36 paginePráctica 3Sabb BelaunzaranNessuna valutazione finora
- Practica0 MecanismoDocumento18 paginePractica0 MecanismoEduardo Verona100% (1)
- Sistema de UnidadesDocumento10 pagineSistema de UnidadesFrancis Delgado R100% (2)
- Conversion VF, FVDocumento12 pagineConversion VF, FVJonathan CronqueNessuna valutazione finora
- Análisis CombinatorioDocumento18 pagineAnálisis CombinatorioSantiago Alonso Barrionuevo100% (1)
- Sesion NueveDocumento24 pagineSesion NueveDelki Leonel Herrera PalaciosNessuna valutazione finora
- 2018-01-11-Cuerpo RígidoDocumento8 pagine2018-01-11-Cuerpo RígidomariluNessuna valutazione finora
- Formulario - MEZCLAS DE GASES QUE NO REACCIONANDocumento2 pagineFormulario - MEZCLAS DE GASES QUE NO REACCIONANJonathan AlvarezNessuna valutazione finora
- 2 Tarea TallerDocumento2 pagine2 Tarea TallerJonathan AlvarezNessuna valutazione finora
- Mapa Base PiscoDocumento1 paginaMapa Base PiscoJonathan AlvarezNessuna valutazione finora
- Ejercicios SolidoDocumento7 pagineEjercicios SolidoedisonNessuna valutazione finora
- 1 Análisis GráficoDocumento5 pagine1 Análisis GráficoJonathan AlvarezNessuna valutazione finora
- Trastorno de La Conducta Alimentaria Reporte de LecturaDocumento4 pagineTrastorno de La Conducta Alimentaria Reporte de LecturaPaola GonzalezNessuna valutazione finora
- Test Que Evalua El Control Del TroncoLDocumento1 paginaTest Que Evalua El Control Del TroncoLYuLii MoXaNessuna valutazione finora
- Pidex I PDFDocumento526 paginePidex I PDFVerónica VelázquezNessuna valutazione finora
- GUIA No. 6 GRADOS 10 Y 11 ED. ARTISTICADocumento2 pagineGUIA No. 6 GRADOS 10 Y 11 ED. ARTISTICALimon AmargóNessuna valutazione finora
- Contrato de Locación de Servicios Rastreo Satelital para Localización de VehiculosDocumento7 pagineContrato de Locación de Servicios Rastreo Satelital para Localización de Vehiculosvicesco75% (4)
- Inventario de Educación A DistanciaDocumento2 pagineInventario de Educación A DistanciaGerardoHernandezVillarauxNessuna valutazione finora
- El Paso de La Perpendicular Al Nivel - Juan Hidalgo Barraza, 2°Documento7 pagineEl Paso de La Perpendicular Al Nivel - Juan Hidalgo Barraza, 2°JAIME MARIN100% (4)
- Monica Moreno - Etapa 4 - Memorias Argumentales (Registro Documental de Experiencias Pedagógicas Artísticas)Documento5 pagineMonica Moreno - Etapa 4 - Memorias Argumentales (Registro Documental de Experiencias Pedagógicas Artísticas)Orlando Sanchez AriasNessuna valutazione finora
- Manual de Orientaciones Hosting 2014Documento196 pagineManual de Orientaciones Hosting 2014SilCislaghiNessuna valutazione finora
- Numeros 12Documento6 pagineNumeros 12akio77Nessuna valutazione finora
- Respuestas EticaDocumento3 pagineRespuestas EticaLaura Mireya Vargas DiazNessuna valutazione finora
- Fisiologia Del Equilibrio!!Documento8 pagineFisiologia Del Equilibrio!!Genesis ZambranoNessuna valutazione finora
- Contenidos Administracion de Personal - Final PDFDocumento62 pagineContenidos Administracion de Personal - Final PDFYuliana Alexandra Echeverri PinedaNessuna valutazione finora
- Ecuaciones de Navier StokesDocumento21 pagineEcuaciones de Navier StokesflorezescobarNessuna valutazione finora
- Trabajo Práctico N1 SeñasDocumento4 pagineTrabajo Práctico N1 SeñasAnabella SteimbrecherNessuna valutazione finora
- ANÁLISIS DE ERRORES Y SOLUCIÓN DE ECUACIONES EN UNA VARIABLE Resolver Los Siguientes Ejercicio1Documento9 pagineANÁLISIS DE ERRORES Y SOLUCIÓN DE ECUACIONES EN UNA VARIABLE Resolver Los Siguientes Ejercicio1fabio dazaNessuna valutazione finora
- TS ForenseDocumento9 pagineTS ForenseRosa Viviana SotoNessuna valutazione finora
- Sesión 06 - Orientación Individual No DirectivaDocumento12 pagineSesión 06 - Orientación Individual No DirectivaDEYSI IVONE VIDAL PONCENessuna valutazione finora
- Qué Se Celebra en México El 20 de NoviembreDocumento3 pagineQué Se Celebra en México El 20 de NoviembreRicardo ZapataNessuna valutazione finora
- Dialnet SobreLaDignidadHumana 6052094Documento15 pagineDialnet SobreLaDignidadHumana 6052094DiegoMassariolNessuna valutazione finora
- Trauma OclusalDocumento34 pagineTrauma OclusalCarlos Ramirez SarmientoNessuna valutazione finora
- Hepatomegalia PDFDocumento16 pagineHepatomegalia PDFfabsscribdworksNessuna valutazione finora
- TalabarteríaDocumento21 pagineTalabarteríaMEIH5año MalfussiNessuna valutazione finora
- 2bach - Mates II - Selectividad.21-21.ModeloDocumento9 pagine2bach - Mates II - Selectividad.21-21.ModeloFilolilo XDNessuna valutazione finora
- PCE Salud Preventiva TBCDocumento43 paginePCE Salud Preventiva TBCbianca.duranrubio17Nessuna valutazione finora
- GK China TouchDocumento28 pagineGK China Touchmatias ripollNessuna valutazione finora
- Formulario y Aprobación de Los Proyectos de Inversión SocialDocumento2 pagineFormulario y Aprobación de Los Proyectos de Inversión Socialparticipacion100% (1)
- Proceso de de Limpieza y Desinfeccion 2013Documento44 pagineProceso de de Limpieza y Desinfeccion 2013vanesaNessuna valutazione finora
- Angelitos Empantanados-Cronograma de LecturaDocumento4 pagineAngelitos Empantanados-Cronograma de LecturaAnGeLiTa BallesterosNessuna valutazione finora
- Defensa Teorica - Jennifer CruzDocumento13 pagineDefensa Teorica - Jennifer CruzcabrerahartNessuna valutazione finora