Potrebbero piacerti anche
- RecurDyn 版本6高级训练手册Documento47 pagineRecurDyn 版本6高级训练手册Jou0411100% (1)
- DrivingJTurn English RecurdynDocumento43 pagineDrivingJTurn English RecurdynAnh Tuan LeNessuna valutazione finora
- Highway Planning Manual Volume 8 PDFDocumento72 pagineHighway Planning Manual Volume 8 PDFHanz Maca-ayanNessuna valutazione finora
- Simpack Off-Line and Real Time SimulationDocumento23 pagineSimpack Off-Line and Real Time SimulationAnderson ZambrzyckiNessuna valutazione finora
- Working Principle of Diesel EngineDocumento30 pagineWorking Principle of Diesel EngineShahzaibUsmanNessuna valutazione finora
- 18 - Instrument Calibration PDFDocumento50 pagine18 - Instrument Calibration PDFAldy Al Rachman100% (1)
- PressFitPressureCalculator English UnitsDocumento5 paginePressFitPressureCalculator English UnitsFelipeNessuna valutazione finora
- Chapter 7Documento43 pagineChapter 7Bairoju Shiva KumarNessuna valutazione finora
- 4 - Ce133 - Strength Analysis of Beams According To Aci or NSCP Codes PDFDocumento22 pagine4 - Ce133 - Strength Analysis of Beams According To Aci or NSCP Codes PDFRalph PacilNessuna valutazione finora
- EXPERIMENT Heat BalanceDocumento7 pagineEXPERIMENT Heat BalanceYogesh Shekhawat100% (2)
- Unit 48 - Report 01Documento10 pagineUnit 48 - Report 01Yashodha HansamalNessuna valutazione finora
- Application Manual: Safemove1Documento230 pagineApplication Manual: Safemove1viniciusNessuna valutazione finora
- c3 PDFDocumento29 paginec3 PDFHrithik IGNessuna valutazione finora
- P6 Presentation-30-3-2021Documento68 pagineP6 Presentation-30-3-2021Moiz MalikNessuna valutazione finora
- PrecastDocumento35 paginePrecastalyssa0% (1)
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDa EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNessuna valutazione finora
- 4.1 - Final - Troubleshooting TheoryDocumento3 pagine4.1 - Final - Troubleshooting TheoryUMAR TARIQNessuna valutazione finora
- Analysis and Simulation of The Electrical-DifferenDocumento16 pagineAnalysis and Simulation of The Electrical-DifferenVan VuNessuna valutazione finora
- Ooad Lab Manual-1 JNTUHDocumento41 pagineOoad Lab Manual-1 JNTUHnirmalNessuna valutazione finora
- Generative Design Essentials of Convergent Modeling Topology OptimizationDocumento10 pagineGenerative Design Essentials of Convergent Modeling Topology Optimizationcad cadNessuna valutazione finora
- Product Version: Boost Up Your Certification ScoreDocumento5 pagineProduct Version: Boost Up Your Certification ScoreOsama LariNessuna valutazione finora
- 10 1 1 6Documento148 pagine10 1 1 6Lky LauNessuna valutazione finora
- MX52 P09Documento154 pagineMX52 P09hari235Nessuna valutazione finora
- CATIA CAD Customization Automation API Job ProjectsDocumento10 pagineCATIA CAD Customization Automation API Job ProjectssarfrajNessuna valutazione finora
- A User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramDocumento47 pagineA User-Material Subroutine Incorporating Single Crystal Plasticity in The Abaqus Finite Element ProgramangrycabbageNessuna valutazione finora
- Maximo Cognos Feature Guide: Ibm® Watson IotDocumento67 pagineMaximo Cognos Feature Guide: Ibm® Watson Iotyuan_2425Nessuna valutazione finora
- Specification, Design and Kinematic Analysis of An Electric Toothbrush Using CATIAV5R19Documento109 pagineSpecification, Design and Kinematic Analysis of An Electric Toothbrush Using CATIAV5R19Ahmed BdairNessuna valutazione finora
- Kinematics and Dynamics - Lab3 PDFDocumento8 pagineKinematics and Dynamics - Lab3 PDFKunal SharmaNessuna valutazione finora
- Basic Pro-E Ques and AnswerDocumento14 pagineBasic Pro-E Ques and Answerapi-3808872100% (1)
- RobowareDocumento442 pagineRobowareRui LopesNessuna valutazione finora
- Analyzing A Model: ObjectivesDocumento20 pagineAnalyzing A Model: ObjectivesarchNessuna valutazione finora
- Controls CatalogoDocumento111 pagineControls CatalogoKadu92Nessuna valutazione finora
- Application Manual: Servo Gun SetupDocumento82 pagineApplication Manual: Servo Gun SetupLuis ClaudioNessuna valutazione finora
- Le Van Sy PHD Thesis PDFDocumento205 pagineLe Van Sy PHD Thesis PDFNhan LeNessuna valutazione finora
- Types of ManagersDocumento4 pagineTypes of ManagersCarrie PetersonNessuna valutazione finora
- Maximo Asset Managment Version 7 1 OverviewDocumento42 pagineMaximo Asset Managment Version 7 1 OverviewDome ChatchaiNessuna valutazione finora
- Vessel Management SystemDocumento1 paginaVessel Management Systemvran77Nessuna valutazione finora
- Explore Maximo Data With Watson AnalyticsDocumento11 pagineExplore Maximo Data With Watson AnalyticscfrentzNessuna valutazione finora
- Project Systems Engineering Management Plan TemplateDocumento24 pagineProject Systems Engineering Management Plan TemplateKudzayi MatekaireNessuna valutazione finora
- INTRODUCTION Railway ReservationDocumento61 pagineINTRODUCTION Railway ReservationSanjiv GautamNessuna valutazione finora
- What's New in Maximo 7.5Documento137 pagineWhat's New in Maximo 7.5Esteban Javier Molina100% (1)
- SEV Self Balance ScooterDocumento2 pagineSEV Self Balance ScootermalaigolokNessuna valutazione finora
- Chapter 5 - Braking System - Introduction To Automotive EngineeringDocumento8 pagineChapter 5 - Braking System - Introduction To Automotive EngineeringDinku Seyoum ZelekeNessuna valutazione finora
- Modal Transient Dynamic Analysis of A BracketDocumento8 pagineModal Transient Dynamic Analysis of A BracketSrikanth Kabbal MNessuna valutazione finora
- Getting Started Guide: Control System Toolbox™ 9Documento280 pagineGetting Started Guide: Control System Toolbox™ 9PANKAJ TIWARINessuna valutazione finora
- An Overview of Brake Noise and Vibration ProblemsDocumento7 pagineAn Overview of Brake Noise and Vibration ProblemsChangbum YuNessuna valutazione finora
- Dynamic Speed GovernorDocumento1 paginaDynamic Speed GovernorBijil BajiNessuna valutazione finora
- Multibody System Simulation With SimmechanicsDocumento24 pagineMultibody System Simulation With SimmechanicsSonny Jason ANessuna valutazione finora
- IV Field BusDocumento65 pagineIV Field BusvarunshyamNessuna valutazione finora
- BMC Remedy Action Request System 7.5.00 Form and Application Objects GuideDocumento486 pagineBMC Remedy Action Request System 7.5.00 Form and Application Objects GuideCecilio GutierrezNessuna valutazione finora
- Oomd Notes &question Bank by PramodDocumento172 pagineOomd Notes &question Bank by PramodMohan PonduriNessuna valutazione finora
- Sinamics v90 at s7-1200 Docu v1d1 en PDFDocumento85 pagineSinamics v90 at s7-1200 Docu v1d1 en PDFTrí HữuNessuna valutazione finora
- Dyna LookDocumento19 pagineDyna LookGavriloae IonNessuna valutazione finora
- TM1112TRE.433-EnG - Robotics Technology Mapp ROBOTICS - V5.2Documento52 pagineTM1112TRE.433-EnG - Robotics Technology Mapp ROBOTICS - V5.2Bhavesh BharambeNessuna valutazione finora
- Technical Seminar Presentation HarishDocumento21 pagineTechnical Seminar Presentation Harishprashanth nNessuna valutazione finora
- RulebookDocumento50 pagineRulebookGNessuna valutazione finora
- 2008 NX Open StatusDocumento24 pagine2008 NX Open Statushector_547Nessuna valutazione finora
- ANSYS - Placement Test Problem StatementDocumento25 pagineANSYS - Placement Test Problem StatementMahesh GarlankaNessuna valutazione finora
- Ansys Minerva Users GuideDocumento276 pagineAnsys Minerva Users GuidekskskNessuna valutazione finora
- Computer Aided Technologies Part - 1Documento18 pagineComputer Aided Technologies Part - 1Swarn KumarNessuna valutazione finora
- Invitation To Bid: General GuidelinesDocumento25 pagineInvitation To Bid: General GuidelinesGregoria ReyesNessuna valutazione finora
- OXF ModelDocumento435 pagineOXF Modelmohan_v_sNessuna valutazione finora
- CH 18 Cellular ManufacturingDocumento38 pagineCH 18 Cellular ManufacturingMehul Nitnaware100% (1)
- Unit-I Two Marks Questions and Answers 1. Explain CIMDocumento4 pagineUnit-I Two Marks Questions and Answers 1. Explain CIMKailashNessuna valutazione finora
- IBM Maximo Asset Configuration Manager A Complete Guide - 2020 EditionDa EverandIBM Maximo Asset Configuration Manager A Complete Guide - 2020 EditionNessuna valutazione finora
- RF Shielded Room Preinstallation Requirements For MR Systems - PIM - 5850260-8PT-BR - 3Documento31 pagineRF Shielded Room Preinstallation Requirements For MR Systems - PIM - 5850260-8PT-BR - 3FelipeNessuna valutazione finora
- (ARUM180BTE5, ARUM240BTE5) : Copa 01Documento1 pagina(ARUM180BTE5, ARUM240BTE5) : Copa 01FelipeNessuna valutazione finora
- CAD Template Architectural-Xx-A1Documento1 paginaCAD Template Architectural-Xx-A1FelipeNessuna valutazione finora
- (ARUM120BTE5, ARUM220BTE5) : # Nota: Recomendamos Um Tamanho Maior para o Disjuntor Do Circuito Do Que o CalculadoDocumento1 pagina(ARUM120BTE5, ARUM220BTE5) : # Nota: Recomendamos Um Tamanho Maior para o Disjuntor Do Circuito Do Que o CalculadoFelipeNessuna valutazione finora
- Ossos de NapierDocumento2 pagineOssos de NapierFelipeNessuna valutazione finora
- HW 5 Suspension ForcesDocumento8 pagineHW 5 Suspension ForcesFelipeNessuna valutazione finora
- Mondo-Tronics Nitinol Shape Memory Alloy WireDocumento2 pagineMondo-Tronics Nitinol Shape Memory Alloy WireFelipeNessuna valutazione finora
- 879mathematical Modelling of Ball On A Middle Supported Beam PDFDocumento4 pagine879mathematical Modelling of Ball On A Middle Supported Beam PDFFelipeNessuna valutazione finora
- Advanced Liquid Cooling in HCPVT Systems To Achieve Higher Energy EfficienciesDocumento5 pagineAdvanced Liquid Cooling in HCPVT Systems To Achieve Higher Energy EfficienciesFelipeNessuna valutazione finora
- Normative Model of Human Hand For Biomechanical AnalysisDocumento14 pagineNormative Model of Human Hand For Biomechanical AnalysisFelipeNessuna valutazione finora
- Duropal Worktop Collection UK & Ireland 2021-2024Documento19 pagineDuropal Worktop Collection UK & Ireland 2021-2024VivanNessuna valutazione finora
- Case Study 5 - Enhanced ERDDocumento4 pagineCase Study 5 - Enhanced ERDMarcos Jeremy0% (1)
- Debug 1214Documento3 pagineDebug 1214Darius DragutzuNessuna valutazione finora
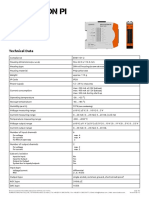
- Datasheet RevPi AIODocumento2 pagineDatasheet RevPi AIOsebadansNessuna valutazione finora
- PW5 Basic Double Busbar Dis 20Documento12 paginePW5 Basic Double Busbar Dis 20Shanthiyaah ArumugamNessuna valutazione finora
- RDMC - Cairo Metro Line-3 Checklist 03-02: Rail - Greasy Status Check PreventiveDocumento1 paginaRDMC - Cairo Metro Line-3 Checklist 03-02: Rail - Greasy Status Check PreventiveMina AlbertNessuna valutazione finora
- Thomson Chasis ICC17Documento52 pagineThomson Chasis ICC17videosonNessuna valutazione finora
- TQMDocumento55 pagineTQMTanmoy GuhaNessuna valutazione finora
- Gear Can Be DefinedDocumento31 pagineGear Can Be Definedasisha mostNessuna valutazione finora
- Css-Esd ToolDocumento2 pagineCss-Esd ToolSARAH JANE BUCTUANNessuna valutazione finora
- (XENO-360) Quick ManualDocumento2 pagine(XENO-360) Quick ManualYousef SyNessuna valutazione finora
- A Preliminary Literature Review of Digital Transformation Case StudiesDocumento6 pagineA Preliminary Literature Review of Digital Transformation Case StudiesLucija IvancicNessuna valutazione finora
- Sony FDR AX1 - E ProDocumento68 pagineSony FDR AX1 - E ProTodorNessuna valutazione finora
- Acf DifferencesDocumento71 pagineAcf DifferencesMorrisNessuna valutazione finora
- Design and Analysis of Retaining WallsDocumento38 pagineDesign and Analysis of Retaining WallsMohamed MuayidNessuna valutazione finora
- Thern DavitCrane Selection SheetDocumento1 paginaThern DavitCrane Selection SheetShubhamkumarsharmaNessuna valutazione finora
- Non-Concurrent Space ForcesDocumento2 pagineNon-Concurrent Space ForcesJessica De GuzmanNessuna valutazione finora
- BrochureDocumento4 pagineBrochureChristina MaierNessuna valutazione finora
- Computer Architecture and Parallel Processing by Kai Hwang PDFDocumento6 pagineComputer Architecture and Parallel Processing by Kai Hwang PDFApoorva ursNessuna valutazione finora
- Rendering An Exterior Scene - V-Ray 2.0 For SketchUp - Chaos Group HelpDocumento9 pagineRendering An Exterior Scene - V-Ray 2.0 For SketchUp - Chaos Group HelpRapha RachoNessuna valutazione finora
- (L2) - Mole Concept JEEDocumento19 pagine(L2) - Mole Concept JEEHYDRA CLAN100% (1)
- Computation of LoadsDocumento1 paginaComputation of LoadsmchenmiaNessuna valutazione finora