Potrebbero piacerti anche
- Soc 7Documento8 pagineSoc 7Towfeeq MohammedNessuna valutazione finora
- CS82 Advanced Computer Architecture: Parallel Computer Models 1.2 Multiprocessors and MulticomputersDocumento19 pagineCS82 Advanced Computer Architecture: Parallel Computer Models 1.2 Multiprocessors and MulticomputersamithaNessuna valutazione finora
- CSCI 8150 Advanced Computer ArchitectureDocumento19 pagineCSCI 8150 Advanced Computer ArchitectureHarsh BhardwajNessuna valutazione finora
- CSCI 8150 Advanced Computer ArchitectureDocumento18 pagineCSCI 8150 Advanced Computer Architecturesunnynnus100% (2)
- Parallel Computer Models: PCA Chapter 1Documento61 pagineParallel Computer Models: PCA Chapter 1AYUSH KUMARNessuna valutazione finora
- Parallel ArchitectureDocumento33 pagineParallel ArchitectureDebarshi MajumderNessuna valutazione finora
- Parallel Processors: Session 2Documento32 pagineParallel Processors: Session 2Tapti SoniNessuna valutazione finora
- COME6102 Chapter 1 Introduction 2 of 2Documento8 pagineCOME6102 Chapter 1 Introduction 2 of 2Franck TiomoNessuna valutazione finora
- CSA Mod-3Documento39 pagineCSA Mod-3Pallavi BhartiNessuna valutazione finora
- Cs405-Computer System Architecture: Module - 1 Parallel Computer ModelsDocumento72 pagineCs405-Computer System Architecture: Module - 1 Parallel Computer Modelsashji s rajNessuna valutazione finora
- Cs405-Computer System Architecture: Module - 1 Parallel Computer ModelsDocumento72 pagineCs405-Computer System Architecture: Module - 1 Parallel Computer Modelsashji s rajNessuna valutazione finora
- Cs405-Computer System Architecture: Module - 1 Parallel Computer ModelsDocumento91 pagineCs405-Computer System Architecture: Module - 1 Parallel Computer Modelsashji s rajNessuna valutazione finora
- Advance Computer Architecture2Documento36 pagineAdvance Computer Architecture2AnujNessuna valutazione finora
- Flynn's Classification/ Flynn's Taxonomy:: StreamDocumento13 pagineFlynn's Classification/ Flynn's Taxonomy:: StreamSaloni NayanNessuna valutazione finora
- Cluster Computing: Dr. C. Amalraj 01/03/2021 The University of Moratuwa Amalraj@uom - LKDocumento49 pagineCluster Computing: Dr. C. Amalraj 01/03/2021 The University of Moratuwa Amalraj@uom - LKNishshanka CJNessuna valutazione finora
- Unit I IntroductionDocumento54 pagineUnit I IntroductionMerbin JoseNessuna valutazione finora
- Parallel Programming Platforms (Part 1) : CSE3057Y Parallel and Distributed SystemsDocumento38 pagineParallel Programming Platforms (Part 1) : CSE3057Y Parallel and Distributed SystemssplokbovNessuna valutazione finora
- Parallel Processing Quiz No 1 Fill in The BlanksDocumento2 pagineParallel Processing Quiz No 1 Fill in The BlanksDEVESH RANJANNessuna valutazione finora
- What Is Parallel ComputingDocumento9 pagineWhat Is Parallel ComputingLaura DavisNessuna valutazione finora
- 02 - Lecture - Part1-Flynns TaxonomyDocumento21 pagine02 - Lecture - Part1-Flynns TaxonomyAhmedNessuna valutazione finora
- Lecture-27 Interconnection Networks+chapter-5 Slides-Version-2Documento70 pagineLecture-27 Interconnection Networks+chapter-5 Slides-Version-2Abdul BariiNessuna valutazione finora
- Chapter - 5 Multiprocessors and Thread-Level Parallelism: A Taxonomy of Parallel ArchitecturesDocumento41 pagineChapter - 5 Multiprocessors and Thread-Level Parallelism: A Taxonomy of Parallel ArchitecturesraghvendrmNessuna valutazione finora
- IV. Physical Organization and Models: March 9, 2009Documento35 pagineIV. Physical Organization and Models: March 9, 2009tt_aljobory3911Nessuna valutazione finora
- Theory of Computation Programming Locality of Reference Computer StorageDocumento4 pagineTheory of Computation Programming Locality of Reference Computer Storagesitu_elecNessuna valutazione finora
- Advance Computer Architecture in 5 PagesDocumento5 pagineAdvance Computer Architecture in 5 Pagesmorvarid7980Nessuna valutazione finora
- Understanding Non-Uniform Memory Access - NUMADocumento3 pagineUnderstanding Non-Uniform Memory Access - NUMAANILPETWALNessuna valutazione finora
- NOTESDocumento19 pagineNOTESUmer ManshaNessuna valutazione finora
- IV. Physical Organization and Models: March 9, 2009Documento35 pagineIV. Physical Organization and Models: March 9, 2009Anisorac VasileNessuna valutazione finora
- SIMD Vs MIMD With Memory ModelsDocumento7 pagineSIMD Vs MIMD With Memory Modelssonal yadavNessuna valutazione finora
- L2Documento27 pagineL2chhabra_amit78Nessuna valutazione finora
- Lecture 3 PDCDocumento21 pagineLecture 3 PDCAhsan SaeedNessuna valutazione finora
- Multiprocessor Architectures and ProgrammingDocumento89 pagineMultiprocessor Architectures and ProgrammingKULDEEP NARAYAN MINJNessuna valutazione finora
- Explicitly Parallel PlatformsDocumento90 pagineExplicitly Parallel PlatformswmanjonjoNessuna valutazione finora
- Unit 1Documento21 pagineUnit 1vedarajNessuna valutazione finora
- Parallel Processors and Cluster Systems: Gagan Bansal IME SahibabadDocumento15 pagineParallel Processors and Cluster Systems: Gagan Bansal IME SahibabadGagan BansalNessuna valutazione finora
- COA AssignmentDocumento21 pagineCOA Assignment3d nat natiNessuna valutazione finora
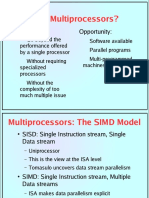
- Why Choose A Multiprocessor?Documento17 pagineWhy Choose A Multiprocessor?M Ijaz ChohanNessuna valutazione finora
- Challenges of Memory Management ON MODERN NUMA SYSTEMSDocumento26 pagineChallenges of Memory Management ON MODERN NUMA SYSTEMSLe PaNessuna valutazione finora
- Multiprocessor Architecture and ProgrammingDocumento20 pagineMultiprocessor Architecture and Programmingவெ. விஷ்வாNessuna valutazione finora
- S 8 Mod 1Documento33 pagineS 8 Mod 1sheenaneesNessuna valutazione finora
- Programação Paralela e DistribuídaDocumento39 pagineProgramação Paralela e DistribuídaMarcelo AzevedoNessuna valutazione finora
- Relation To Computer System Components: M.D.Boomija, Ap/CseDocumento39 pagineRelation To Computer System Components: M.D.Boomija, Ap/Cseboomija100% (1)
- Term Paper: Computer Organization and Architecure (Cse211)Documento7 pagineTerm Paper: Computer Organization and Architecure (Cse211)sunnyajayNessuna valutazione finora
- Mca - Unit IiiDocumento59 pagineMca - Unit IiiVivek DubeyNessuna valutazione finora
- Unit 6 - Computer Organization and Architecture - WWW - Rgpvnotes.inDocumento14 pagineUnit 6 - Computer Organization and Architecture - WWW - Rgpvnotes.inNandini SharmaNessuna valutazione finora
- ACA T1 SolutionsDocumento17 pagineACA T1 SolutionsshardapatelNessuna valutazione finora
- 2ad6a430 1637912349895Documento51 pagine2ad6a430 1637912349895roopshree udaiwalNessuna valutazione finora
- ACA Assignment 4Documento16 pagineACA Assignment 4shresth choudharyNessuna valutazione finora
- Module 2 - Parallel ComputingDocumento55 pagineModule 2 - Parallel ComputingmuwaheedmustaphaNessuna valutazione finora
- Unit VIDocumento50 pagineUnit VIoptics opticsNessuna valutazione finora
- Parallel Computer Models: CEG 4131 Computer Architecture III Miodrag BolicDocumento27 pagineParallel Computer Models: CEG 4131 Computer Architecture III Miodrag BolicShylaja BNessuna valutazione finora
- Week 6 ADocumento32 pagineWeek 6 Ahussmalik69Nessuna valutazione finora
- cs668 Lec1 ParallelArchDocumento18 paginecs668 Lec1 ParallelArchIshAureaNessuna valutazione finora
- Cis620 15 00Documento36 pagineCis620 15 00Heval TariQNessuna valutazione finora
- HPC Unit 3Documento31 pagineHPC Unit 3Sudha PalaniNessuna valutazione finora
- BE Comps DC Week1Documento67 pagineBE Comps DC Week1Tejas BhanushaliNessuna valutazione finora
- Why Multiprocessors?: Motivation: OpportunityDocumento20 pagineWhy Multiprocessors?: Motivation: OpportunityAaryadeep JaiswalNessuna valutazione finora
- Lect10 SMPCCDocumento27 pagineLect10 SMPCCbassam abutraabNessuna valutazione finora
- ACA Mod4Documento61 pagineACA Mod4Bharath N ReddyNessuna valutazione finora
- Digital Electronics, Computer Architecture and Microprocessor Design PrinciplesDa EverandDigital Electronics, Computer Architecture and Microprocessor Design PrinciplesNessuna valutazione finora
- 1 PDFDocumento15 pagine1 PDFΛιθοξόος ΈλληνNessuna valutazione finora
- UML LabDocumento5 pagineUML LabasdNessuna valutazione finora
- On The Classification of Computer ArchitectureDocumento11 pagineOn The Classification of Computer ArchitectureAya YasserNessuna valutazione finora
- Computer PeripheralsDocumento11 pagineComputer PeripheralsAnkit KadvaniNessuna valutazione finora
- Debugger ToolsDocumento11 pagineDebugger ToolsvuppalasampathNessuna valutazione finora
- De1-Soc Faq: De1 - Soc - Traning/de1 - Soc - Traning/lab /advanced - Demo/demo1 - AxiDocumento5 pagineDe1-Soc Faq: De1 - Soc - Traning/de1 - Soc - Traning/lab /advanced - Demo/demo1 - AxiAhmed YasserNessuna valutazione finora
- With The Invention of The HP-2115, The Company Hewlett Packard Enters The Computer BusinessDocumento3 pagineWith The Invention of The HP-2115, The Company Hewlett Packard Enters The Computer BusinessIsha GargNessuna valutazione finora
- Computer Systems / ServicingDocumento406 pagineComputer Systems / ServicingMakaha Rutendo0% (1)
- Apple II Sound Routine (6502)Documento2 pagineApple II Sound Routine (6502)fair_acre9524Nessuna valutazione finora
- Analyzing Master Boot Record For Forensic InvestigDocumento6 pagineAnalyzing Master Boot Record For Forensic Investigkkroto gokuNessuna valutazione finora
- Msi Radeon RX 580 Gaming X 8g DatasheetDocumento1 paginaMsi Radeon RX 580 Gaming X 8g DatasheetPiw WatchareeNessuna valutazione finora
- Canon Mf4780wDocumento4 pagineCanon Mf4780wAhmed HassanNessuna valutazione finora
- SysteminfoDocumento2 pagineSysteminfojaimeNessuna valutazione finora
- Grade 8 and 9 Handling Examination Question PresentationDocumento31 pagineGrade 8 and 9 Handling Examination Question PresentationBricious Mulimbi100% (1)
- 1 - Computer and Its GenerationDocumento41 pagine1 - Computer and Its GenerationJan AlamNessuna valutazione finora
- Chapater - 1 - Introduction To Human Computer InteractionDocumento18 pagineChapater - 1 - Introduction To Human Computer InteractionSelhadin abduNessuna valutazione finora
- Encore Computer 32 - 67 SystemDocumento7 pagineEncore Computer 32 - 67 SystemLito HulipasNessuna valutazione finora
- Classification ComputerDocumento3 pagineClassification Computerajith123321Nessuna valutazione finora
- Free For Students, Computer Notes For Class 9th 10thDocumento66 pagineFree For Students, Computer Notes For Class 9th 10thHassan78% (59)
- Supported Display Modules & TFT ControllersDocumento4 pagineSupported Display Modules & TFT ControllersSCIFITECHNessuna valutazione finora
- Operating System CS211L Lab - 01 Ubuntu InstallationDocumento16 pagineOperating System CS211L Lab - 01 Ubuntu Installationsaqib25492Nessuna valutazione finora
- La1 Review Computer SystemDocumento43 pagineLa1 Review Computer SystemMOHD NOORNessuna valutazione finora
- Aftermarket HDS Multiplatform Software Installation InstructionsDocumento21 pagineAftermarket HDS Multiplatform Software Installation InstructionsApoelistas ApoelistasNessuna valutazione finora
- SB5101MoD Firmware SettingsDocumento6 pagineSB5101MoD Firmware SettingshanzdoloNessuna valutazione finora
- Lesson Plan FOR MICROPROCESSORDocumento3 pagineLesson Plan FOR MICROPROCESSORAtul GaurNessuna valutazione finora
- Kernel (Computing) : From Wikipedia, The Free EncyclopediaDocumento24 pagineKernel (Computing) : From Wikipedia, The Free Encyclopediaaysteph3Nessuna valutazione finora
- Project 12springDocumento5 pagineProject 12springFarzin GhotbiNessuna valutazione finora
- Virtualization - Using Logical Domains (Ldom) : HypervisorDocumento7 pagineVirtualization - Using Logical Domains (Ldom) : HypervisorTapan HazraNessuna valutazione finora
- MPMC SyllabusDocumento1 paginaMPMC SyllabusELECTRON 4 UNessuna valutazione finora