Potrebbero piacerti anche
- Gyrocompass Navigat X MK 2Documento4 pagineGyrocompass Navigat X MK 2tariktunadNessuna valutazione finora
- Navigat X Mk1 DatasheetDocumento2 pagineNavigat X Mk1 DatasheetcristianocalheirosNessuna valutazione finora
- New Edition of Admiralty Mariners Handbook Np100Documento1 paginaNew Edition of Admiralty Mariners Handbook Np100Di DiNessuna valutazione finora
- Ahts 0610Documento12 pagineAhts 0610seckin80100% (1)
- Multihull Seamanship: An A-Z of skills for catamarans & trimarans / cruising & racingDa EverandMultihull Seamanship: An A-Z of skills for catamarans & trimarans / cruising & racingNessuna valutazione finora
- Anchorages and Marinas of the Eastern Canaries: Sailing off the Coasts of Lanzarote, Fuerteventura and Gran CanariaDa EverandAnchorages and Marinas of the Eastern Canaries: Sailing off the Coasts of Lanzarote, Fuerteventura and Gran CanariaNessuna valutazione finora
- Library Books AmendedDocumento4 pagineLibrary Books Amendedbittu692Nessuna valutazione finora
- Powerboating: The RIB & Sportsboat Handbook: Handling RIBs & SportsboatsDa EverandPowerboating: The RIB & Sportsboat Handbook: Handling RIBs & SportsboatsNessuna valutazione finora
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesDa EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesValutazione: 5 su 5 stelle5/5 (3)
- Marine Guidance Notices (MGNS)Documento7 pagineMarine Guidance Notices (MGNS)Rhm Watten BachNessuna valutazione finora
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersDa EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersValutazione: 5 su 5 stelle5/5 (1)
- Absalon And Esbern Snare. The Danish Navy’s Support Ships Of The Absalon ClassDa EverandAbsalon And Esbern Snare. The Danish Navy’s Support Ships Of The Absalon ClassValutazione: 5 su 5 stelle5/5 (1)
- 39 WKNM 07Documento147 pagine39 WKNM 07Ioannis Finaru100% (1)
- Admiralty e NP FactsheetDocumento4 pagineAdmiralty e NP FactsheetVisveswaran Inbasekaran100% (1)
- Transas ASD Tug Simulator Leaflet PreviewDocumento5 pagineTransas ASD Tug Simulator Leaflet PreviewEdi Putro SantosoNessuna valutazione finora
- Malacca Straits-Aids To NavigationDocumento22 pagineMalacca Straits-Aids To NavigationFerit Aslanyürek100% (1)
- Bridge Resource Management for Small Ships (PB)Da EverandBridge Resource Management for Small Ships (PB)Valutazione: 5 su 5 stelle5/5 (4)
- Ecdis Handbook 2Documento1 paginaEcdis Handbook 2Santoso Wahyudi100% (1)
- The Role of Navigational Aids Such As Radar-ARPA, ECDIS, AIS, Autopilot, On Safe Navigation at SeaDocumento3 pagineThe Role of Navigational Aids Such As Radar-ARPA, ECDIS, AIS, Autopilot, On Safe Navigation at SeasergiuserbanNessuna valutazione finora
- Vryhof Anchor ManualDocumento188 pagineVryhof Anchor ManualSebastianNessuna valutazione finora
- Maneouvering of 3 AZIPOD - ManeouveringDocumento24 pagineManeouvering of 3 AZIPOD - ManeouveringiboshmanNessuna valutazione finora
- IALA Maritime Buoyage System 2010Documento24 pagineIALA Maritime Buoyage System 2010emile jobity100% (2)
- OOW Post HND Information Pack 2013-2014Documento10 pagineOOW Post HND Information Pack 2013-2014Tom Alex100% (2)
- VDRDocumento6 pagineVDRcaptyashpal67% (3)
- New Edition of ADMIRALTY Mariners Handbook NP100Documento1 paginaNew Edition of ADMIRALTY Mariners Handbook NP100thilina pereraNessuna valutazione finora
- Inspected Towing Vessel Inspector Towing Vessel Industry Familiarization WorkbookDocumento53 pagineInspected Towing Vessel Inspector Towing Vessel Industry Familiarization WorkbookJoel Jeffery SarkarNessuna valutazione finora
- DP Operator Manual: Practical Exercise No. 1Documento11 pagineDP Operator Manual: Practical Exercise No. 1Kunal SinghNessuna valutazione finora
- MMH Twin Screw JI Draft Jan 2012Documento12 pagineMMH Twin Screw JI Draft Jan 2012Janardhanan BalakrishnanNessuna valutazione finora
- Marine Radio Operator Permit Manual: Pass Your Marine Operator Permit ExamDa EverandMarine Radio Operator Permit Manual: Pass Your Marine Operator Permit ExamNessuna valutazione finora
- NAEST Question and AnsDocumento26 pagineNAEST Question and AnsSoul Mariner100% (1)
- 1 Management of Bridge Operations ModuleDocumento167 pagine1 Management of Bridge Operations ModuleBen Klein100% (1)
- Gmdss Guide PDFDocumento12 pagineGmdss Guide PDFBao TranNessuna valutazione finora
- Anchor Handling (K.Mamondole 2009) PDFDocumento213 pagineAnchor Handling (K.Mamondole 2009) PDFSergey Vasilievich ChetverichenkoNessuna valutazione finora
- AMSA Mariners Handbook For Australian Waters 5th Edition 2019 10Documento324 pagineAMSA Mariners Handbook For Australian Waters 5th Edition 2019 10Maksim Zaritskii100% (1)
- Aus Reporting AUSREPDocumento28 pagineAus Reporting AUSREPCapt.AjithNessuna valutazione finora
- ADMIRALTY Sailing DirectionsDocumento1 paginaADMIRALTY Sailing DirectionsJAYSON CANDELARIA50% (2)
- GMDSS: ManualDocumento2 pagineGMDSS: ManualHamis RamadhaniNessuna valutazione finora
- Toms Vol3no2 Doi007Documento7 pagineToms Vol3no2 Doi007AhmedSalemNessuna valutazione finora
- DGS Gudelines For 2nd Mate FGDocumento9 pagineDGS Gudelines For 2nd Mate FGSAKSHI INSTITUTE OF MARITIME FOUNDATIONNessuna valutazione finora
- PaulaC DaryaGayatriDocumento68 paginePaulaC DaryaGayatriDragos CalinNessuna valutazione finora
- VDL 6000 AIS Class A SystemDocumento17 pagineVDL 6000 AIS Class A SystemLucio Canché SantosNessuna valutazione finora
- Stability For Offshore VesselsDocumento2 pagineStability For Offshore VesselsilgarNessuna valutazione finora
- Exam Dynamic Positioning OE5663 20152016Documento8 pagineExam Dynamic Positioning OE5663 20152016Kamp RichardNessuna valutazione finora
- Manoeuvring BookletDocumento34 pagineManoeuvring BookletvDeepDive100% (1)
- THE NAVIGATOR - October2012 PDFDocumento12 pagineTHE NAVIGATOR - October2012 PDFpraticorobsonNessuna valutazione finora
- ST 703 09 Life Saving AppliancesDocumento76 pagineST 703 09 Life Saving AppliancesJaya SankerNessuna valutazione finora
- 8 GOOD Interaction of Tug ShipDocumento2 pagine8 GOOD Interaction of Tug ShipndesigngmailNessuna valutazione finora
- Crew Transfer Vessels:: Good Practice GuideDocumento21 pagineCrew Transfer Vessels:: Good Practice Guideoto saviour100% (1)
- Skagen To Klaipeda PilotDocumento15 pagineSkagen To Klaipeda PilotGonçalo CruzeiroNessuna valutazione finora
- An Introduction To GMDSS-8th EditionDocumento212 pagineAn Introduction To GMDSS-8th EditionDuyNessuna valutazione finora
- A Test of SeamanshipDocumento8 pagineA Test of SeamanshipChristos Anthoulakis100% (1)
- 2010 STCW Manilia Amendment IMODocumento25 pagine2010 STCW Manilia Amendment IMOYat Ming Chau0% (1)
- The DP Operatorâ ™s Handbook Second Edition: DP Training Scheme ChangesDocumento1 paginaThe DP Operatorâ ™s Handbook Second Edition: DP Training Scheme ChangesDanilo100% (1)
- Medical Chest ListDocumento9 pagineMedical Chest ListSreedarsh MenonNessuna valutazione finora
- Siem Offshore 2015 Annual ReportDocumento104 pagineSiem Offshore 2015 Annual ReportTail RiskNessuna valutazione finora
- Passage Plan - Amsterdam - TuxpanDocumento11 paginePassage Plan - Amsterdam - TuxpanAdrian Cretu100% (1)
- AP70/AP80: Operator ManualDocumento72 pagineAP70/AP80: Operator ManualcostinosNessuna valutazione finora
- AP70/AP80: Operator ManualDocumento72 pagineAP70/AP80: Operator Manualcostinos100% (1)
- Vp1000 RepairDocumento3 pagineVp1000 RepaircostinosNessuna valutazione finora
- Quickstart Guide: Ap70/Ap80Documento6 pagineQuickstart Guide: Ap70/Ap80costinosNessuna valutazione finora
- Vp1000 User ManualDocumento2 pagineVp1000 User ManualcostinosNessuna valutazione finora
- BW-800 Instruction ManualDocumento15 pagineBW-800 Instruction Manualcostinos100% (1)
- CAMINO-201 Service Manual - v2.01Documento18 pagineCAMINO-201 Service Manual - v2.01costinosNessuna valutazione finora
- JSS-2150 Service Manual PDFDocumento160 pagineJSS-2150 Service Manual PDFcostinosNessuna valutazione finora
- JSS-2250 Instruction Manual PDFDocumento220 pagineJSS-2250 Instruction Manual PDFcostinosNessuna valutazione finora
- Lawrance Sonar 3500 PDFDocumento7 pagineLawrance Sonar 3500 PDFcostinosNessuna valutazione finora
- mdc-2900 Ime Rev07 PDFDocumento110 paginemdc-2900 Ime Rev07 PDFcostinosNessuna valutazione finora
- Principles of RadarDocumento29 paginePrinciples of RadarcostinosNessuna valutazione finora
- JMA-9900 Instruction Manual PDFDocumento410 pagineJMA-9900 Instruction Manual PDFcostinosNessuna valutazione finora
- JRC RADAR 1000MKII Instruction Manual PDFDocumento49 pagineJRC RADAR 1000MKII Instruction Manual PDFcostinos100% (1)
- MDC-2200 - 2500 - Installation Manual - Rev07 PDFDocumento123 pagineMDC-2200 - 2500 - Installation Manual - Rev07 PDFcostinosNessuna valutazione finora
- AIS JRC JHS182-instruction Manual PDFDocumento108 pagineAIS JRC JHS182-instruction Manual PDFcostinosNessuna valutazione finora
- Clipping Clamping CircuitsDocumento7 pagineClipping Clamping CircuitsPavan SaiNessuna valutazione finora
- Hemoglobin A1c: A) MES 2-Morpholinoethane Sulfonic Acid B) TRIS Tris (Hydroxymethyl) - AminomethaneDocumento6 pagineHemoglobin A1c: A) MES 2-Morpholinoethane Sulfonic Acid B) TRIS Tris (Hydroxymethyl) - Aminomethanejoudi.jou95Nessuna valutazione finora
- Camcor Coriolis Meter User ManualDocumento140 pagineCamcor Coriolis Meter User ManualGerardo OrtigozaNessuna valutazione finora
- AssignmentDocumento9 pagineAssignmentRazi BaigNessuna valutazione finora
- FPM 2004Documento257 pagineFPM 2004Srikant SuruNessuna valutazione finora
- Rpzf2: Product Data SheetDocumento4 pagineRpzf2: Product Data SheetJosé RincónNessuna valutazione finora
- Introduction To Research MethodsDocumento11 pagineIntroduction To Research MethodsKamlakar SadavarteNessuna valutazione finora
- Omnibus Risk EstimatorDocumento6 pagineOmnibus Risk EstimatorConta do CerberusNessuna valutazione finora
- Grade 9 Cells and Cell Movements Formative WorksheetDocumento8 pagineGrade 9 Cells and Cell Movements Formative WorksheetHari PatelNessuna valutazione finora
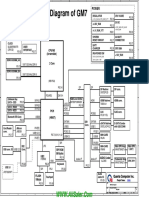
- Dell XPS 17 Quanta GM7 Rev D SchematicsDocumento39 pagineDell XPS 17 Quanta GM7 Rev D SchematicsvcompumatikNessuna valutazione finora
- Oracle Database 11g Transparent Data EncryptionDocumento40 pagineOracle Database 11g Transparent Data EncryptionYelena BytenskayaNessuna valutazione finora
- Ec2203-Unit IV Memory Devices Digital ElectronicsDocumento38 pagineEc2203-Unit IV Memory Devices Digital ElectronicsKarthikeyan_Go_952567% (6)
- Studi Dampak Lalu Lintas Pembangunan Gudang Dan Kantor Pt. Wismilak Group Di Jalan Raya Solo SragenDocumento8 pagineStudi Dampak Lalu Lintas Pembangunan Gudang Dan Kantor Pt. Wismilak Group Di Jalan Raya Solo SragenIlung MarpaungNessuna valutazione finora
- Chapter 2 Maternal Anatomy WilliamsDocumento60 pagineChapter 2 Maternal Anatomy WilliamsDiskaAstariniNessuna valutazione finora
- Bouveault-Blanc Ester ReductionDocumento3 pagineBouveault-Blanc Ester ReductionAriel GarciaNessuna valutazione finora
- DPP 01 Periodic Table JH Sir-3576 PDFDocumento5 pagineDPP 01 Periodic Table JH Sir-3576 PDFChessNessuna valutazione finora
- Korean Lesson 1Documento12 pagineKorean Lesson 1Ivett97Nessuna valutazione finora
- Thermal Analysis and Compensation of A Double Column Machining CentreDocumento9 pagineThermal Analysis and Compensation of A Double Column Machining CentreShamanth CNessuna valutazione finora
- Falcon 4 CLHS Cameras: True High-Performance: High-Speed Global Shutter CMOS CamerasDocumento4 pagineFalcon 4 CLHS Cameras: True High-Performance: High-Speed Global Shutter CMOS CamerasEkpetorson ChinweikeNessuna valutazione finora
- Medical Laboratory Technology Journal: Kadar Vitamin C Jeruk Sunkist Peras Dan Infused WaterDocumento5 pagineMedical Laboratory Technology Journal: Kadar Vitamin C Jeruk Sunkist Peras Dan Infused WaterlinggaNessuna valutazione finora
- 04 Extended Graphics DesignDocumento34 pagine04 Extended Graphics DesignEngenheiro AmoedoNessuna valutazione finora
- Clase 13-06Documento28 pagineClase 13-06Jhurema NihuaNessuna valutazione finora
- 7 - Introduction To Intelligent ControlDocumento21 pagine7 - Introduction To Intelligent ControlIsmael Espinoza100% (1)
- Sc3 Lecture Short CKT Currents BMR Feb.03, 2021Documento11 pagineSc3 Lecture Short CKT Currents BMR Feb.03, 2021Khizer AminNessuna valutazione finora
- The Role of Virtual Reality Simulation in Surgical Training in The Light of COVID-19 PandemicDocumento13 pagineThe Role of Virtual Reality Simulation in Surgical Training in The Light of COVID-19 PandemicIván Hernández FloresNessuna valutazione finora
- S ParametersDocumento29 pagineS ParameterseloiseNessuna valutazione finora
- Understanding The Use of Ofdm in Ieee 802.16 (Wimax) : Roberto SacchiDocumento8 pagineUnderstanding The Use of Ofdm in Ieee 802.16 (Wimax) : Roberto SacchiHarald KerresNessuna valutazione finora
- AMC Measurement ProblemsDocumento2 pagineAMC Measurement ProblemseltoNessuna valutazione finora
- Chapter 11Documento53 pagineChapter 11Vijendhar ReddyNessuna valutazione finora
- 1.basic Electrical Engineering Lecture Part-1Documento17 pagine1.basic Electrical Engineering Lecture Part-1jimvalenciaNessuna valutazione finora