Potrebbero piacerti anche
- Deborah v. Mink, Earlene J. (FRW) Hall-Strategies For Teaching Mathematics-Shell Education (2009)Documento320 pagineDeborah v. Mink, Earlene J. (FRW) Hall-Strategies For Teaching Mathematics-Shell Education (2009)Ame RizhukaNessuna valutazione finora
- Numerical Methods Multibody DynamicsDocumento287 pagineNumerical Methods Multibody DynamicsMax Vazquez-Cedeno0% (1)
- 16.3.1 - Homogeneous Equations With Constant Coefficients Second OrderDocumento16 pagine16.3.1 - Homogeneous Equations With Constant Coefficients Second Orderanon_422073337100% (1)
- Alan Andrew CourseDocumento85 pagineAlan Andrew Courseleechen2222100% (4)
- Ordinary Differential Equations - Solution ManualDocumento176 pagineOrdinary Differential Equations - Solution Manualrlewis120% (1)
- HND Mechatronics (NBTE)Documento281 pagineHND Mechatronics (NBTE)Favour Uche ChukwuNessuna valutazione finora
- Chapter 4 Multiple Degree of Freedom SystemsDocumento89 pagineChapter 4 Multiple Degree of Freedom SystemsTom LaNessuna valutazione finora
- 24.3.6 - Variation of Parameters Second OrderDocumento11 pagine24.3.6 - Variation of Parameters Second Orderanon_422073337Nessuna valutazione finora
- 19.3.3 - Complex Roots of The Characteristic EquationDocumento9 pagine19.3.3 - Complex Roots of The Characteristic Equationanon_422073337Nessuna valutazione finora
- ch03 2Documento23 paginech03 2phakphumNessuna valutazione finora
- 25.4.4 - The Method of Variation of Parameters Higher OrderDocumento10 pagine25.4.4 - The Method of Variation of Parameters Higher Orderanon_422073337Nessuna valutazione finora
- 20.3.4 - Repeated Roots Reduction of OrderDocumento16 pagine20.3.4 - Repeated Roots Reduction of Orderanon_422073337Nessuna valutazione finora
- 16.3.1 - Homogeneous Equations With Constant Coefficients Second OrderDocumento15 pagine16.3.1 - Homogeneous Equations With Constant Coefficients Second OrderChua JenzerNessuna valutazione finora
- 20.3.4 - Repeated Roots Reduction of OrderDocumento16 pagine20.3.4 - Repeated Roots Reduction of OrderJobert CajayonNessuna valutazione finora
- Boyce de 10e PPT Ch03Documento13 pagineBoyce de 10e PPT Ch03phakphumNessuna valutazione finora
- Second Class: Linear Equations Method of Integrating FactorsDocumento15 pagineSecond Class: Linear Equations Method of Integrating FactorsPFENessuna valutazione finora
- CH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsDocumento21 pagineCH 7.9: Nonhomogeneous Linear Systems: The General Theory of A Nonhomogeneous System of EquationsRMolina65Nessuna valutazione finora
- CH 3.2: Fundamental Solutions of Linear Homogeneous EquationsDocumento21 pagineCH 3.2: Fundamental Solutions of Linear Homogeneous EquationsRaj SharmaNessuna valutazione finora
- Week 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDocumento6 pagineWeek 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDeepjyoti MajumderNessuna valutazione finora
- Boyce/Diprima 9 Ed, CH 2.1: Linear Equations Method of Integrating FactorsDocumento15 pagineBoyce/Diprima 9 Ed, CH 2.1: Linear Equations Method of Integrating FactorsWinda DwiNessuna valutazione finora
- CH 3.6: Variation of Parameters: T G y T Q y T P yDocumento9 pagineCH 3.6: Variation of Parameters: T G y T Q y T P yPercdc DavaoNessuna valutazione finora
- Convolution IntegralDocumento13 pagineConvolution Integralahmad mzNessuna valutazione finora
- 3.7 Wronskians and Variation of Parameters: 3.7.1 The WronskianDocumento7 pagine3.7 Wronskians and Variation of Parameters: 3.7.1 The WronskianodbayNessuna valutazione finora
- 23.4.3 - The Method of Undetermined Coefficients Higher OrderDocumento7 pagine23.4.3 - The Method of Undetermined Coefficients Higher Orderanon_422073337Nessuna valutazione finora
- 27.3.8 - Forced VibrationsDocumento31 pagine27.3.8 - Forced Vibrationsanon_422073337Nessuna valutazione finora
- 2 Second Order Linear ODE: Aim: To Discuss DiscussDocumento9 pagine2 Second Order Linear ODE: Aim: To Discuss DiscussMaalmalan KeekiyyaaNessuna valutazione finora
- Materi (PD Orde 1 Dan FI) PDFDocumento18 pagineMateri (PD Orde 1 Dan FI) PDFFadilyahyaNessuna valutazione finora
- Estimating Circuit Parametrs Using Transfer Function MethodolgyDocumento24 pagineEstimating Circuit Parametrs Using Transfer Function MethodolgyRavula Shivarama KrishnaNessuna valutazione finora
- ch3 - AODDocumento154 paginech3 - AODAnonymous OrhjVLXO5sNessuna valutazione finora
- Discrete Approximation of Continuous Systems: CSE 421 Digital ControlDocumento15 pagineDiscrete Approximation of Continuous Systems: CSE 421 Digital ControlAhmed YounisNessuna valutazione finora
- 4 - System Time ResponseDocumento16 pagine4 - System Time ResponseAndrewAbdelmassiehNessuna valutazione finora
- Lecture 9Documento5 pagineLecture 9Peter WambuorNessuna valutazione finora
- On Free Mechanical VibrationsDocumento41 pagineOn Free Mechanical VibrationsPuneet BahriNessuna valutazione finora
- Midterm 01Documento3 pagineMidterm 01UnknownNessuna valutazione finora
- Surname, Name:: Mt410 Exam 3 Sample 1Documento8 pagineSurname, Name:: Mt410 Exam 3 Sample 1hendrik setyawanNessuna valutazione finora
- Curves hw1Documento2 pagineCurves hw1Anirudh NairNessuna valutazione finora
- 27.3.8 - Forced VibrationsDocumento32 pagine27.3.8 - Forced VibrationskumiristineNessuna valutazione finora
- Line Integrals 1Documento27 pagineLine Integrals 1aayangreatgreatNessuna valutazione finora
- 1 s2.0 S0166218X01003080 Main PDFDocumento7 pagine1 s2.0 S0166218X01003080 Main PDFLvaNessuna valutazione finora
- A First Course in Elementary Differential Equations: Problems and SolutionsDocumento8 pagineA First Course in Elementary Differential Equations: Problems and SolutionsjuanNessuna valutazione finora
- Boyce/Diprima 10 Ed, CH 3.8: Forced VibrationsDocumento29 pagineBoyce/Diprima 10 Ed, CH 3.8: Forced VibrationsphakphumNessuna valutazione finora
- Modeling ProblemsDocumento6 pagineModeling Problemsrohan mishraNessuna valutazione finora
- Chapter 5 FrenchDocumento70 pagineChapter 5 FrenchVaibhav SharmaNessuna valutazione finora
- Given,: Solution of A Differential EquationDocumento6 pagineGiven,: Solution of A Differential EquationSuresh PrasadNessuna valutazione finora
- S&S L5Documento77 pagineS&S L5Aalaa Hussein HamidNessuna valutazione finora
- MKM Sharifpur Lecture 1Documento25 pagineMKM Sharifpur Lecture 1Costa SeindisNessuna valutazione finora
- Practice 1st Exam-SolutionsDocumento4 paginePractice 1st Exam-SolutionsJohn 777Nessuna valutazione finora
- D T D T STT I C T DT DT: Project 1Documento4 pagineD T D T STT I C T DT DT: Project 1solarprismNessuna valutazione finora
- Exam2InClassReview2Solutions PDFDocumento1 paginaExam2InClassReview2Solutions PDFRicardo Bernardo RickyNessuna valutazione finora
- Curves in SpaceDocumento10 pagineCurves in SpaceJohn ManciaNessuna valutazione finora
- SMDocumento176 pagineSMjcurol4Nessuna valutazione finora
- Signals and Systems Kuestion (EE) PDFDocumento48 pagineSignals and Systems Kuestion (EE) PDFsanthoshNessuna valutazione finora
- Solution of Discrete Time State Equations: EE-601: Linear System TheoryDocumento42 pagineSolution of Discrete Time State Equations: EE-601: Linear System TheorysunilsahadevanNessuna valutazione finora
- Fourier Series PresentationDocumento81 pagineFourier Series PresentationRajithNimali100% (1)
- Computational Fluid Dynamics : February 28Documento68 pagineComputational Fluid Dynamics : February 28Tatenda NyabadzaNessuna valutazione finora
- KL University, Vaddeswaram, Dept. of ECE, Signal Analysis (15 ES 2002) Lesson-1b Fundamentals of SignalsDocumento16 pagineKL University, Vaddeswaram, Dept. of ECE, Signal Analysis (15 ES 2002) Lesson-1b Fundamentals of SignalsramsastryNessuna valutazione finora
- Mathematical ModelDocumento18 pagineMathematical Modelardius ebenezerNessuna valutazione finora
- Discrete Random Variables and Probability DistributionsDocumento36 pagineDiscrete Random Variables and Probability DistributionsBeverly PamanNessuna valutazione finora
- Answer On Question #74059 - Math - Differential Equations: Sin) - , (TDocumento3 pagineAnswer On Question #74059 - Math - Differential Equations: Sin) - , (TlekhaNessuna valutazione finora
- Self-Study Review (Chapter B) : Z X Jy (Cartesian Form)Documento3 pagineSelf-Study Review (Chapter B) : Z X Jy (Cartesian Form)ashaw002Nessuna valutazione finora
- Computational Fluid Dynamics : March 5Documento29 pagineComputational Fluid Dynamics : March 5Tatenda NyabadzaNessuna valutazione finora
- RK Derivation 0Documento2 pagineRK Derivation 0Hamza KazmiNessuna valutazione finora
- Boyce/Diprima 10 Ed, CH 3.8: Forced VibrationsDocumento29 pagineBoyce/Diprima 10 Ed, CH 3.8: Forced VibrationsphakphumNessuna valutazione finora
- Grammar น่าฮักDocumento3 pagineGrammar น่าฮักphakphumNessuna valutazione finora
- Boyce DE 10e PPT ch10 4 FINALDocumento13 pagineBoyce DE 10e PPT ch10 4 FINALphakphumNessuna valutazione finora
- Boyce/Diprima 10 Ed, CH 10.8 Appendix A: Derivation of The Heat Conduction EquationDocumento21 pagineBoyce/Diprima 10 Ed, CH 10.8 Appendix A: Derivation of The Heat Conduction EquationphakphumNessuna valutazione finora
- Boyce/Diprima 10 Ed, CH 10.1: Two Point Boundary Value ProblemsDocumento19 pagineBoyce/Diprima 10 Ed, CH 10.1: Two Point Boundary Value ProblemsphakphumNessuna valutazione finora
- Boyce/Diprima 10 Ed, CH 10.8 Appendix B: Derivation of The Wave EquationDocumento10 pagineBoyce/Diprima 10 Ed, CH 10.8 Appendix B: Derivation of The Wave EquationphakphumNessuna valutazione finora
- Boyce de 10e PPT Ch02 2 FinalDocumento9 pagineBoyce de 10e PPT Ch02 2 FinalphakphumNessuna valutazione finora
- Boyce/Diprima 10 Ed, CH 10.7: The Wave Equation: Vibrations of An Elastic StringDocumento39 pagineBoyce/Diprima 10 Ed, CH 10.7: The Wave Equation: Vibrations of An Elastic StringphakphumNessuna valutazione finora
- Boyce de 10e PPT Ch03Documento13 pagineBoyce de 10e PPT Ch03phakphumNessuna valutazione finora
- Grobler AJ Chapter4Documento14 pagineGrobler AJ Chapter4hieuhuech1Nessuna valutazione finora
- Wardova Metoda Od WardaDocumento10 pagineWardova Metoda Od WardaStarý DonorNessuna valutazione finora
- IIyear R Mid2 Question BankDocumento2 pagineIIyear R Mid2 Question Bankssrkm guptaNessuna valutazione finora
- MCV4U Derivatives of Exponential and Logarithmic Functions Practice TestDocumento6 pagineMCV4U Derivatives of Exponential and Logarithmic Functions Practice TestEmily ChenNessuna valutazione finora
- Is A Random Walk The Best ExchangeDocumento13 pagineIs A Random Walk The Best ExchangeÉlisabeth SoroNessuna valutazione finora
- 08 Matrices and Determinants 19Documento18 pagine08 Matrices and Determinants 19Vaibhav TripathiNessuna valutazione finora
- Analytical Geometry (1) : LessonDocumento4 pagineAnalytical Geometry (1) : Lessongemgirl6686Nessuna valutazione finora
- Hydrogen Atom and Non Euclidean GeometryDocumento11 pagineHydrogen Atom and Non Euclidean GeometryMichel MarcondesNessuna valutazione finora
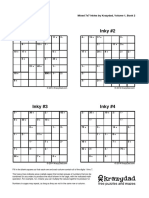
- Inky #1 Inky #2: Mixed 7x7 Inkies by Krazydad, Volume 1, Book 2Documento3 pagineInky #1 Inky #2: Mixed 7x7 Inkies by Krazydad, Volume 1, Book 2AparNessuna valutazione finora
- MMW 103Documento3 pagineMMW 103Sean Virgines DueNessuna valutazione finora
- Course Module 3 and 4 Mathematics of InvestmentDocumento22 pagineCourse Module 3 and 4 Mathematics of InvestmentAnne Maerick Jersey OteroNessuna valutazione finora
- 0 Perkenalan Mata Kuliah DCS EngDocumento5 pagine0 Perkenalan Mata Kuliah DCS EngriyoprilianNessuna valutazione finora
- Mathematics-III ME CE-BSM-301Documento2 pagineMathematics-III ME CE-BSM-301Shresth SanskarNessuna valutazione finora
- All Formulas and Notes For Maths Class 11 Note Download Chapter 1 and 2 Sets and Relations and Func PDFDocumento11 pagineAll Formulas and Notes For Maths Class 11 Note Download Chapter 1 and 2 Sets and Relations and Func PDFthirumalaiselvankNessuna valutazione finora
- Week 2 AssesmentDocumento3 pagineWeek 2 AssesmentNICO BACUNGANNessuna valutazione finora
- Q1 Math4 Week6Documento29 pagineQ1 Math4 Week6Tarhata LampatanNessuna valutazione finora
- Guided Notes FactoringDocumento9 pagineGuided Notes Factoringapi-376801179Nessuna valutazione finora
- Math 2nd Quarter Lesson Plans in Math FolderDocumento5 pagineMath 2nd Quarter Lesson Plans in Math Folderapi-267962355Nessuna valutazione finora
- 02 Dirac Notation PDFDocumento7 pagine02 Dirac Notation PDFBryan JanierNessuna valutazione finora
- Binder1 71 PDFDocumento1 paginaBinder1 71 PDFAbdul RahmanNessuna valutazione finora
- Csec Add Maths 2017: Section I Answer BOTH Questions. ALL Working Must Be Clearly Shown. 1. (A)Documento31 pagineCsec Add Maths 2017: Section I Answer BOTH Questions. ALL Working Must Be Clearly Shown. 1. (A)gochi bestNessuna valutazione finora
- Chapter 1Documento10 pagineChapter 1Moon LytNessuna valutazione finora
- Metaheuristic Optimization: Algorithm Analysis and Open ProblemsDocumento12 pagineMetaheuristic Optimization: Algorithm Analysis and Open ProblemsOlivia brianneNessuna valutazione finora
- POLYNOMIALSDocumento11 paginePOLYNOMIALSrojanie cacaitNessuna valutazione finora
- Optimization of Fishing VesselDocumento11 pagineOptimization of Fishing VesselLucas GuesseNessuna valutazione finora
- 2010 Apcalculus Websites-HynesDocumento3 pagine2010 Apcalculus Websites-HynesCarol H. APSI teacherNessuna valutazione finora