Potrebbero piacerti anche
- 3 - RCS BásicoDocumento97 pagine3 - RCS BásicoWesley Gonzalo Yupanqui100% (1)
- 1.RCS Ecs DCSDocumento14 pagine1.RCS Ecs DCSandres100% (2)
- Descripción de Sistema RCSDocumento8 pagineDescripción de Sistema RCSandresNessuna valutazione finora
- Rcs SystemDocumento4 pagineRcs SystemFrancisco gajardoNessuna valutazione finora
- Curso RCSDocumento160 pagineCurso RCSLuis Carlos Araya100% (7)
- Boomer XE3 C, WE3 C - Control System RCS5Documento220 pagineBoomer XE3 C, WE3 C - Control System RCS5Esteban San Martín Maulén100% (3)
- ST14 Motor - FinalDocumento39 pagineST14 Motor - FinalJose Maria Castro Pazos100% (3)
- Entrenamiento en ROC L7, L7cr, L8 Atlas Copco PDFDocumento160 pagineEntrenamiento en ROC L7, L7cr, L8 Atlas Copco PDFDanielAlfaro93% (14)
- Atlas Copco Drilling Solutions: Rcs Training Rev 000 McashDocumento176 pagineAtlas Copco Drilling Solutions: Rcs Training Rev 000 McashAF VM100% (2)
- Animacion S1DDocumento38 pagineAnimacion S1DMarlon José Meza Jimenez100% (1)
- Introduccion Al RCS - Rev1Documento40 pagineIntroduccion Al RCS - Rev1Eduardo Bugueño100% (2)
- 11-01 Boltec S - Frenos y DirecciónDocumento23 pagine11-01 Boltec S - Frenos y DirecciónMiguel Paez Noe100% (1)
- Introduccion Bommer s2cDocumento43 pagineIntroduccion Bommer s2cWira's Kote Sacha Crigal100% (3)
- Operation ManualDocumento108 pagineOperation Manualwilliam100% (1)
- Analisis Solucion de Problemas MT65 - EsDocumento44 pagineAnalisis Solucion de Problemas MT65 - EsMARIO DEL PINO MUÑOZNessuna valutazione finora
- 9852 2920 56a Service Manual MT6020 (MK II)Documento212 pagine9852 2920 56a Service Manual MT6020 (MK II)Osvaldo Donoso Torres100% (1)
- TIS0000040.002 Es-MX Boomer S1 D - SafetyDocumento64 pagineTIS0000040.002 Es-MX Boomer S1 D - SafetyJavier100% (1)
- Analisis de Fallas en PerforadorasDocumento33 pagineAnalisis de Fallas en Perforadorasr2drill100% (9)
- Rcs Calibracion BoomerDocumento24 pagineRcs Calibracion BoomerFrancisco gajardo100% (4)
- Boomer s2 MovimientosDocumento157 pagineBoomer s2 MovimientosOSCAR JULIAN GUTIERREZ RUBIO100% (1)
- Capacitacion de BoomerDocumento70 pagineCapacitacion de BoomerBELTRAN100% (1)
- Manual Boltec CementoDocumento52 pagineManual Boltec CementoFrancisco gajardoNessuna valutazione finora
- 9852 9638 05 RCS Basics - Student BinderDocumento68 pagine9852 9638 05 RCS Basics - Student Bindersebastian Bugueño100% (1)
- Sistema de Control RCS St18 EpirocDocumento90 pagineSistema de Control RCS St18 EpirocMARIO DEL PINO MUÑOZNessuna valutazione finora
- Curso Parte Electrica Scooptram ST 1030 Atlas CopcoDocumento33 pagineCurso Parte Electrica Scooptram ST 1030 Atlas CopcoJhon Charlie Alvarez Rodriguez100% (7)
- s06 THC 560 Axera 5 EsDocumento104 pagines06 THC 560 Axera 5 EsJuan Carlos Emmanuel Garcés90% (10)
- ST1030 SafetyDocumento24 pagineST1030 Safetymarcelo ortizNessuna valutazione finora
- Actualizacion Equipos Boomer PDFDocumento63 pagineActualizacion Equipos Boomer PDFEfrain DY100% (1)
- Esquemas de Mantenimiento ROC L6 (25), L6 (30), L8 (25), L8Documento52 pagineEsquemas de Mantenimiento ROC L6 (25), L6 (30), L8 (25), L8Alex Narea50% (2)
- Sistema de Control MT65 - EsDocumento150 pagineSistema de Control MT65 - EsKevin UrrutiaNessuna valutazione finora
- Sistema Eléctrico MT65 - EsDocumento41 pagineSistema Eléctrico MT65 - EsMARIO DEL PINO MUÑOZNessuna valutazione finora
- Atlas Copco BoltecDocumento16 pagineAtlas Copco BoltecArmandoVelásquez100% (2)
- Check List Boomer S1D EPIROCDocumento33 pagineCheck List Boomer S1D EPIROCVictor Gutierrez0% (1)
- S2 Aire y AguaDocumento47 pagineS2 Aire y AguaFrancisco gajardo100% (1)
- Conceptos Del RcsDocumento9 pagineConceptos Del RcsFrancisco gajardo100% (1)
- 351 Evaluacion Jumbo Atlas s1d Dpj-43 AndaychaguaDocumento7 pagine351 Evaluacion Jumbo Atlas s1d Dpj-43 AndaychaguaAlexis Vega Reyes100% (1)
- Curso RCSDocumento160 pagineCurso RCSJORGE C. CHAO R.100% (3)
- 06 AlimentacionS1DDocumento21 pagine06 AlimentacionS1DAdolfo Choccelahua Huincho100% (2)
- Cop 3038 Atlas CopcoDocumento23 pagineCop 3038 Atlas Copconoritabella89% (9)
- Atlas Copco 4.11 TraduccionDocumento122 pagineAtlas Copco 4.11 Traduccioncristian saldivar100% (2)
- Manual Operador CabletecDocumento184 pagineManual Operador CabletecFrancisco gajardo100% (4)
- 00 RCS EspañolDocumento31 pagine00 RCS EspañolRonald ContrerasNessuna valutazione finora
- Curso Perforadoras (Para Personal RDT) 1 DiaDocumento84 pagineCurso Perforadoras (Para Personal RDT) 1 DiaAnonymous nF47MQgstz100% (10)
- Epiroc (Atlas) ST2G MK II - Operation PDFDocumento84 pagineEpiroc (Atlas) ST2G MK II - Operation PDFIvanEduardoPintos100% (2)
- Manual DM45-DMM2Documento387 pagineManual DM45-DMM2Benedicto Bolados100% (3)
- Manual Operación SOLOS PDFDocumento278 pagineManual Operación SOLOS PDFFRANCISCO CARRILLO100% (2)
- Protocolo BOOMER S1DDocumento1 paginaProtocolo BOOMER S1DEduardo Aylas PalaciosNessuna valutazione finora
- Actualización Equipos BoomerDocumento63 pagineActualización Equipos BoomerLuis Reyes Ayala100% (3)
- Perforadora EpirocDocumento68 paginePerforadora EpirocMoises Fernando Quijada Contreras100% (1)
- 9852 3348 56d Maintenance Instructions COP 2238HDplus Ver. FDocumento50 pagine9852 3348 56d Maintenance Instructions COP 2238HDplus Ver. FIvan Andres Seguel Bristilo100% (2)
- ST7 03 Sistema de Control RCSDocumento62 pagineST7 03 Sistema de Control RCSMaribel Sanchez100% (2)
- DIA 1 - RCS (Rig Control System)Documento60 pagineDIA 1 - RCS (Rig Control System)E N R I Q U E carlos falcónNessuna valutazione finora
- Termómetro DigitalDocumento27 pagineTermómetro DigitalLars0337Nessuna valutazione finora
- TR - Spanish Encoders PDFDocumento41 pagineTR - Spanish Encoders PDFJuan Jonathan Hernandez ArellanoNessuna valutazione finora
- Comando de Funciones Via Telefonica MODELO: 4-020: Manual TecnicoDocumento8 pagineComando de Funciones Via Telefonica MODELO: 4-020: Manual TecnicoLuis Jorge Simón GuillénNessuna valutazione finora
- Control Remoto Infrarrojo para Hardware de 10 CanalesDocumento13 pagineControl Remoto Infrarrojo para Hardware de 10 CanalesNitrxNessuna valutazione finora
- Contador Digital de Dos Digitos de 0Documento13 pagineContador Digital de Dos Digitos de 0Shiken Noté KariNessuna valutazione finora
- Diagrama de Conexion de Los Ren de 4 CanalesDocumento6 pagineDiagrama de Conexion de Los Ren de 4 CanalesIveth Ivana Fernandez ApazaNessuna valutazione finora
- RF Electronics CIRCUITOSINTEGRADOSseries Cd40.......Documento6 pagineRF Electronics CIRCUITOSINTEGRADOSseries Cd40.......JoeNessuna valutazione finora
- 100 circuitos de shields para arduino (español)Da Everand100 circuitos de shields para arduino (español)Valutazione: 3.5 su 5 stelle3.5/5 (3)
- 9852 3688 56c Operation Instructions Boltec S PDFDocumento128 pagine9852 3688 56c Operation Instructions Boltec S PDFandresNessuna valutazione finora
- Biodiésel Producción Calidad y CaracterizaciónDocumento153 pagineBiodiésel Producción Calidad y Caracterizaciónandres17% (6)
- Tesis Eficiencia Energética - 17!03!16Documento162 pagineTesis Eficiencia Energética - 17!03!16andresNessuna valutazione finora
- Manual OxiDocumento11 pagineManual OxiandresNessuna valutazione finora
- Manual de Mini Microcentrales HidraulicasDocumento284 pagineManual de Mini Microcentrales Hidraulicassdcalderon75% (4)
- Plano de Álabe Directriz para Turbina OssbergerDocumento1 paginaPlano de Álabe Directriz para Turbina OssbergerandresNessuna valutazione finora
- Manual de Pico y Minicentrales HidroeléctricasDocumento21 pagineManual de Pico y Minicentrales HidroeléctricasandresNessuna valutazione finora
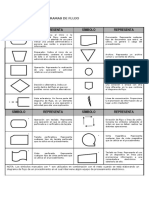
- Simbolos para FlujogramasDocumento1 paginaSimbolos para FlujogramasluisifherNessuna valutazione finora
- (TUTORIAL) Reset Glitch Hack para Principiantes Todo Desde Cero - 3DGDocumento20 pagine(TUTORIAL) Reset Glitch Hack para Principiantes Todo Desde Cero - 3DGmmundialNessuna valutazione finora
- Manual de Instalacion Grupos ElectrogenosDocumento38 pagineManual de Instalacion Grupos ElectrogenosJohn Anderson Morales MartinezNessuna valutazione finora
- Implantación de Sistemas Operativos (ASIR) 01 Introducción Al Software de Base 221024Documento6 pagineImplantación de Sistemas Operativos (ASIR) 01 Introducción Al Software de Base 221024Belen BrionesNessuna valutazione finora
- Yoytec Computer, S.a.-CroppedDocumento1 paginaYoytec Computer, S.a.-CroppedJesus PintoNessuna valutazione finora
- DocdocDocumento3 pagineDocdocJuanCarlosSantamaríaPedrónNessuna valutazione finora
- Plotter HP Designjet T650-36'': Santiago, 2021Documento3 paginePlotter HP Designjet T650-36'': Santiago, 2021Valya Amaya M.Nessuna valutazione finora
- Tarea 6 de Análisis y Diseño de SistemaDocumento8 pagineTarea 6 de Análisis y Diseño de SistemaDanisbel Plasencia R.Nessuna valutazione finora
- Linea Del TiempoDocumento8 pagineLinea Del TiempoWindowsNessuna valutazione finora
- Una Computadora o Computador También Denominada OrdenadorDocumento3 pagineUna Computadora o Computador También Denominada OrdenadorAndresLopezNessuna valutazione finora
- Cap 2 CoulourisDocumento34 pagineCap 2 CoulourisAurora Rodriguez Bermudez0% (1)
- Justificar Tecn Propuesta de TrabajoDocumento4 pagineJustificar Tecn Propuesta de TrabajoMosquera Ayala AlexanderNessuna valutazione finora
- Guía de Aprendizaje #02 Medios de TransmisionDocumento5 pagineGuía de Aprendizaje #02 Medios de TransmisionEdwin Acuña HernandezNessuna valutazione finora
- ExamenDocumento2 pagineExamenPaola DavilaNessuna valutazione finora
- Ntc-Iso 4064-1Documento49 pagineNtc-Iso 4064-1JEME100% (1)
- Cómo Lo Resuelvo AODDocumento9 pagineCómo Lo Resuelvo AODANDREA OCAMPO DELONNessuna valutazione finora
- Cotización Kit 6 Camaras DVR de 4 Canales Cables OriginalesDocumento3 pagineCotización Kit 6 Camaras DVR de 4 Canales Cables OriginalesGuuz peñaNessuna valutazione finora
- Dispositivos Periféricos de EntradaDocumento19 pagineDispositivos Periféricos de EntradagenesiscruzpepenNessuna valutazione finora
- Lab Sistemas OperativosDocumento13 pagineLab Sistemas OperativosEliana AcevedoNessuna valutazione finora
- Introducción A La Programación de MicrocontroladoresDocumento96 pagineIntroducción A La Programación de MicrocontroladoresVicentin LucianoNessuna valutazione finora
- Nvidia Installer HOWTO para Usuarios de openSUSE - OdtDocumento18 pagineNvidia Installer HOWTO para Usuarios de openSUSE - OdtJoséNessuna valutazione finora
- Manual de La CámaraDocumento49 pagineManual de La Cámaraharley largoNessuna valutazione finora
- Drivers Sotfware y AntivirusDocumento14 pagineDrivers Sotfware y AntivirusortegajhonNessuna valutazione finora
- Tabla CablesDocumento2 pagineTabla Cablesfatima SanchezNessuna valutazione finora
- BiosDocumento50 pagineBiosrcsystemNessuna valutazione finora
- Drager M540-Patient-Monitor-Ifu-Ms34070-Es PDFDocumento466 pagineDrager M540-Patient-Monitor-Ifu-Ms34070-Es PDFdnavarro00Nessuna valutazione finora
- Instalación de Un Sistema OperativoDocumento13 pagineInstalación de Un Sistema OperativoWil ColinaNessuna valutazione finora
- PROSOLI Cuestionario Sobre El Microprocesador.Documento8 paginePROSOLI Cuestionario Sobre El Microprocesador.dioscory guzmanNessuna valutazione finora
- Requisitos Del Sistema Vectorworks 2023Documento11 pagineRequisitos Del Sistema Vectorworks 2023patricia qiuNessuna valutazione finora
- Proyecto - InformaticaDocumento45 pagineProyecto - Informaticamonica caceresNessuna valutazione finora