Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The BridgeofthemsamsterdamDocumento67 pagineThe BridgeofthemsamsterdamDiana MoralesNessuna valutazione finora
- AMSA StabilityDocumento25 pagineAMSA Stabilitybhaswath2000100% (1)
- Tawheed - For - Children (Part 1) - DR - As - SalehDocumento10 pagineTawheed - For - Children (Part 1) - DR - As - SalehIbn SadiqNessuna valutazione finora
- Steering Gear+ Autopilot SystemDocumento17 pagineSteering Gear+ Autopilot Systemoladokunsulaiman100% (5)
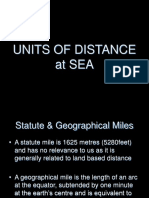
- Units of Distance at SeaDocumento10 pagineUnits of Distance at SeaDiana Morales100% (1)
- Seatrain Inc.: Selandia Marine Services LTDDocumento16 pagineSeatrain Inc.: Selandia Marine Services LTDDiana Morales100% (2)
- Oral Class IIIDocumento86 pagineOral Class IIIDiana MoralesNessuna valutazione finora
- Liner TimeDocumento5 pagineLiner TimeDiana MoralesNessuna valutazione finora
- The BridgeofthemsamsterdamDocumento67 pagineThe BridgeofthemsamsterdamDiana MoralesNessuna valutazione finora
- A Short Guide To Celestial NavigationDocumento90 pagineA Short Guide To Celestial NavigationMartin Zagar100% (1)
- Tonsberg Mooring LinkDocumento1 paginaTonsberg Mooring LinkDiana MoralesNessuna valutazione finora
- Bitumen Safety CodeDocumento69 pagineBitumen Safety CodeVictor Eugen100% (2)
- Confined Spaces PDFDocumento40 pagineConfined Spaces PDFDiana MoralesNessuna valutazione finora
- Ballast Tank CoatingDocumento22 pagineBallast Tank CoatingDiana Morales100% (1)
- Sea Transport of Liquid Chemicals in Bulk PDFDocumento131 pagineSea Transport of Liquid Chemicals in Bulk PDFDiana MoralesNessuna valutazione finora
- BES Chartering & Shipping TermsDocumento447 pagineBES Chartering & Shipping TermsIancu Alter100% (14)
- Foreign Vessel Exam Book For Mtsa/Isps Code Compliance: United States Coast GuardDocumento8 pagineForeign Vessel Exam Book For Mtsa/Isps Code Compliance: United States Coast GuardDiana MoralesNessuna valutazione finora
- Marine Safety CriteriaDocumento39 pagineMarine Safety CriteriaDiana MoralesNessuna valutazione finora
- Parametric Roll Guide-Dec04 PDFDocumento70 pagineParametric Roll Guide-Dec04 PDFDiana MoralesNessuna valutazione finora
- Vessel Inspection Questionnaire PDFDocumento225 pagineVessel Inspection Questionnaire PDFDiana Morales100% (3)
- Inert Gas Systems 1990Documento93 pagineInert Gas Systems 1990Polaris BridgemanNessuna valutazione finora
- The Domino Effect: Coating Breakdown - Corrosion - Structural Failure Leading To Possible Design RamificationsDocumento17 pagineThe Domino Effect: Coating Breakdown - Corrosion - Structural Failure Leading To Possible Design RamificationsDiana MoralesNessuna valutazione finora
- Chapter 9Documento78 pagineChapter 9Diana MoralesNessuna valutazione finora
- Corrosion in Cargo TanksDocumento21 pagineCorrosion in Cargo Tankssergiytitov100% (1)
- 05-06-07 PressureDocumento34 pagine05-06-07 PressureDiana MoralesNessuna valutazione finora
- Baltimore - md-5 - Naval ArchitectureDocumento33 pagineBaltimore - md-5 - Naval ArchitectureDiana MoralesNessuna valutazione finora
- STW 43-3-6 - Model Course - Master and Chief Mate (Secretariat)Documento522 pagineSTW 43-3-6 - Model Course - Master and Chief Mate (Secretariat)RihardsNessuna valutazione finora
- UTA AST-Crane Safety AwarenessDocumento58 pagineUTA AST-Crane Safety AwarenessDiana Morales100% (1)
- Weldingdefects 140115043021 Phpapp02Documento19 pagineWeldingdefects 140115043021 Phpapp02Diana MoralesNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- CDR Writing: Components of The CDRDocumento5 pagineCDR Writing: Components of The CDRindikuma100% (3)
- De DusterDocumento6 pagineDe DusterArstNessuna valutazione finora
- Innovativ and Liabl :: Professional Electronic Control Unit Diagnosis From BoschDocumento28 pagineInnovativ and Liabl :: Professional Electronic Control Unit Diagnosis From BoschacairalexNessuna valutazione finora
- TRICARE Behavioral Health Care ServicesDocumento4 pagineTRICARE Behavioral Health Care ServicesMatthew X. HauserNessuna valutazione finora
- CoSiO2 For Fischer-Tropsch Synthesis Comparison...Documento5 pagineCoSiO2 For Fischer-Tropsch Synthesis Comparison...Genesis CalderónNessuna valutazione finora
- #Angles Are in Degrees: EGR2313 HW SOLUTIONS (2021)Documento4 pagine#Angles Are in Degrees: EGR2313 HW SOLUTIONS (2021)SolomonNessuna valutazione finora
- College of Computer Science Software DepartmentDocumento4 pagineCollege of Computer Science Software DepartmentRommel L. DorinNessuna valutazione finora
- Mark Magazine#65Documento196 pagineMark Magazine#65AndrewKanischevNessuna valutazione finora
- TrellisDocumento1 paginaTrellisCayenne LightenNessuna valutazione finora
- Discovery and Integration Content Guide - General ReferenceDocumento37 pagineDiscovery and Integration Content Guide - General ReferencerhocuttNessuna valutazione finora
- DxDiag Copy MSIDocumento45 pagineDxDiag Copy MSITạ Anh TuấnNessuna valutazione finora
- Technical Data Sheet TR24-3-T USDocumento2 pagineTechnical Data Sheet TR24-3-T USDiogo CNessuna valutazione finora
- Intervensi Terapi Pada Sepsis PDFDocumento28 pagineIntervensi Terapi Pada Sepsis PDFifan zulfantriNessuna valutazione finora
- Grade 9 WorkbookDocumento44 pagineGrade 9 WorkbookMaria Russeneth Joy NaloNessuna valutazione finora
- Daikin FUW Cabinet Fan Coil UnitDocumento29 pagineDaikin FUW Cabinet Fan Coil UnitPaul Mendoza100% (1)
- Lesson: The Averys Have Been Living in New York Since The Late NinetiesDocumento1 paginaLesson: The Averys Have Been Living in New York Since The Late NinetiesLinea SKDNessuna valutazione finora
- Nuclear Power Engineering (MEE 2027) : Fall Semester (2020-2021)Documento13 pagineNuclear Power Engineering (MEE 2027) : Fall Semester (2020-2021)AllNessuna valutazione finora
- Specification Sheet: Case I Case Ii Operating ConditionsDocumento1 paginaSpecification Sheet: Case I Case Ii Operating ConditionsKailas NimbalkarNessuna valutazione finora
- Zygosaccharomyces James2011Documento11 pagineZygosaccharomyces James2011edson escamillaNessuna valutazione finora
- Paramount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceDocumento1 paginaParamount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceSwapnil TiwariNessuna valutazione finora
- Information Technology Project Management: by Jack T. MarchewkaDocumento44 pagineInformation Technology Project Management: by Jack T. Marchewkadeeps0705Nessuna valutazione finora
- Holiday AssignmentDocumento18 pagineHoliday AssignmentAadhitya PranavNessuna valutazione finora
- Aquaculture - Set BDocumento13 pagineAquaculture - Set BJenny VillamorNessuna valutazione finora
- Centrifuge ThickeningDocumento8 pagineCentrifuge ThickeningenviroashNessuna valutazione finora
- Code ExplanantionDocumento4 pagineCode ExplanantionVivek JadiyaNessuna valutazione finora
- F5 Chem Rusting ExperimentDocumento9 pagineF5 Chem Rusting ExperimentPrashanthini JanardananNessuna valutazione finora
- Department of Education: Income Generating ProjectDocumento5 pagineDepartment of Education: Income Generating ProjectMary Ann CorpuzNessuna valutazione finora
- Technion - Computer Science Department - Technical Report CS0055 - 1975Documento25 pagineTechnion - Computer Science Department - Technical Report CS0055 - 1975MoltKeeNessuna valutazione finora
- Flying ColorsDocumento100 pagineFlying ColorsAgnieszkaAgayo20% (5)
- MECANISMOS de Metais de TransicaoDocumento36 pagineMECANISMOS de Metais de TransicaoJoão BarbosaNessuna valutazione finora