Potrebbero piacerti anche
- Chapter 1 - Circuit Characterization of CMOS CircuitsDocumento60 pagineChapter 1 - Circuit Characterization of CMOS CircuitsYean TernNessuna valutazione finora
- CMOS Circuit Metrics for Power and PerformanceDocumento26 pagineCMOS Circuit Metrics for Power and PerformanceAlVarometro Presión FijaNessuna valutazione finora
- Datasheet Vhct245aDocumento9 pagineDatasheet Vhct245aMang Asep BuhoyNessuna valutazione finora
- MM74HC245A Octal 3-STATE Transceiver: General Description FeaturesDocumento8 pagineMM74HC245A Octal 3-STATE Transceiver: General Description FeaturesjoelpalzaNessuna valutazione finora
- Octal Bus Transceiver (3-State) : PD CC oDocumento9 pagineOctal Bus Transceiver (3-State) : PD CC oSero StivNessuna valutazione finora
- Low Voltage Quad 2 Channel Multiplexer: PD CCDocumento8 pagineLow Voltage Quad 2 Channel Multiplexer: PD CCjoelpalzaNessuna valutazione finora
- Multiple Choice Questions: S. Y. B. Sc. Physics Paper - II, Sem-IIIDocumento11 pagineMultiple Choice Questions: S. Y. B. Sc. Physics Paper - II, Sem-IIIQasim M100% (1)
- HITEC University Taxila: Power Electronics LabDocumento9 pagineHITEC University Taxila: Power Electronics LabNisar Ahmed RanaNessuna valutazione finora
- 74LCX245 Low Voltage Bidirectional Transceiver With 5V Tolerant Inputs and OutputsDocumento14 pagine74LCX245 Low Voltage Bidirectional Transceiver With 5V Tolerant Inputs and OutputsozmeenNessuna valutazione finora
- Quad 2 Channel Multiplexer (3-State) : PD CC oDocumento10 pagineQuad 2 Channel Multiplexer (3-State) : PD CC oSero StivNessuna valutazione finora
- 74LVXC4245 8-Bit Dual Supply Configurable Voltage Interface Transceiver With 3-STATE OutputsDocumento8 pagine74LVXC4245 8-Bit Dual Supply Configurable Voltage Interface Transceiver With 3-STATE OutputsStuxnetNessuna valutazione finora
- 74VHC541MDocumento9 pagine74VHC541MricardoNessuna valutazione finora
- Quad 2 Channel Multiplexer (3-State) : Order CodesDocumento12 pagineQuad 2 Channel Multiplexer (3-State) : Order CodesSero StivNessuna valutazione finora
- 74VHC244 Octal Buffer/Line Driver With 3-STATE Outputs: General Description FeaturesDocumento8 pagine74VHC244 Octal Buffer/Line Driver With 3-STATE Outputs: General Description FeaturesSero StivNessuna valutazione finora
- Generate A Ramp Output Waveform Using DAC0800 (Inputs Are Given To DAC Through IC74393 Dual 4-Bit Binary Counter)Documento3 pagineGenerate A Ramp Output Waveform Using DAC0800 (Inputs Are Given To DAC Through IC74393 Dual 4-Bit Binary Counter)Md MoinuddinNessuna valutazione finora
- Octal Bus Transceiver (3-State) : Order CodesDocumento10 pagineOctal Bus Transceiver (3-State) : Order CodesSero StivNessuna valutazione finora
- Lab 2 Basic CMOS AmplifiersDocumento5 pagineLab 2 Basic CMOS AmplifiersJatinKumarNessuna valutazione finora
- DAC CONVERSION TECHNIQUESDocumento28 pagineDAC CONVERSION TECHNIQUESSivasankar PoovaragavanNessuna valutazione finora
- Applications of Opamp As Comparators & Schmitt TriggerDocumento4 pagineApplications of Opamp As Comparators & Schmitt TriggerPaul JambormiasNessuna valutazione finora
- 1.3 Quad 2 - Input NANDd GateDocumento8 pagine1.3 Quad 2 - Input NANDd Gategautampari_gautamNessuna valutazione finora
- mc1377 PDFDocumento18 paginemc1377 PDFAndres CamachoiNessuna valutazione finora
- Dual 4-Input Nand Gate: Order CodesDocumento8 pagineDual 4-Input Nand Gate: Order CodesSero StivNessuna valutazione finora
- CMOS Logic Circuits: Inverter 2 Input NOR 2 Input NAND Other FunctionsDocumento23 pagineCMOS Logic Circuits: Inverter 2 Input NOR 2 Input NAND Other FunctionsKumar Amit VermaNessuna valutazione finora
- Oscillators, Rev ADocumento20 pagineOscillators, Rev ASATVIK AGARWALNessuna valutazione finora
- 74VHC541 Octal Buffer/Line Driver With 3-STATE Outputs: General DescriptionDocumento7 pagine74VHC541 Octal Buffer/Line Driver With 3-STATE Outputs: General Descriptionprdp_666Nessuna valutazione finora
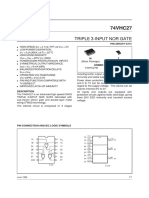
- Triple 3-Input Nor Gate: PD CC oDocumento8 pagineTriple 3-Input Nor Gate: PD CC oSero StivNessuna valutazione finora
- 74VHC245 Octal Bidirectional Transceiver With 3-STATE OutputsDocumento6 pagine74VHC245 Octal Bidirectional Transceiver With 3-STATE OutputsLIFT LIFTNessuna valutazione finora
- CMOS Inverter DC Characteristics and Noise MarginsDocumento28 pagineCMOS Inverter DC Characteristics and Noise Marginsbalukiran2008Nessuna valutazione finora
- IES DsDocumento14 pagineIES DsSubramani KarurNessuna valutazione finora
- Dual 4-Input Nand Gate: PD CC oDocumento8 pagineDual 4-Input Nand Gate: PD CC oSero StivNessuna valutazione finora
- Analog Circuits: GATE EC Topic Wise QuestionsDocumento50 pagineAnalog Circuits: GATE EC Topic Wise Questionsdeepthi1993100% (1)
- DSVD Lecture5Documento75 pagineDSVD Lecture5Rekha MudalagiriNessuna valutazione finora
- ALLAH The Most Merciful, The Most Beneficent"Documento89 pagineALLAH The Most Merciful, The Most Beneficent"api-19788618Nessuna valutazione finora
- Linear Verse NonlinearDocumento25 pagineLinear Verse NonlinearAnonymous fiIjnBNessuna valutazione finora
- Class06 Transmission Line BasicsDocumento49 pagineClass06 Transmission Line Basicsnavinchopra19860% (1)
- CMOS Subsystem Design and Logic GatesDocumento38 pagineCMOS Subsystem Design and Logic GatesPraveen AndrewNessuna valutazione finora
- Quad Bus Buffers (3-State) : PD CC oDocumento9 pagineQuad Bus Buffers (3-State) : PD CC oSero StivNessuna valutazione finora
- Octal D-Type Flip Flop With Clear: Order CodesDocumento12 pagineOctal D-Type Flip Flop With Clear: Order CodesSero StivNessuna valutazione finora
- 74LV08ADocumento8 pagine74LV08AEngin UzunNessuna valutazione finora
- 74F245 Octal Bidirectional Transceiver With 3-STATE Outputs: Features General DescriptionDocumento12 pagine74F245 Octal Bidirectional Transceiver With 3-STATE Outputs: Features General DescriptionedgarlibanioNessuna valutazione finora
- 74VHC273 Octal D-Type Flip-Flop: General Description FeaturesDocumento10 pagine74VHC273 Octal D-Type Flip-Flop: General Description FeaturesSero StivNessuna valutazione finora
- Exp No. 1Documento11 pagineExp No. 1Arron BillNessuna valutazione finora
- 3.3 Control Circuit WiringDocumento11 pagine3.3 Control Circuit WiringMehedi HasanNessuna valutazione finora
- 74VHC08 Quad 2-Input AND Gate DatasheetDocumento9 pagine74VHC08 Quad 2-Input AND Gate DatasheetSero StivNessuna valutazione finora
- Two PortDocumento13 pagineTwo PortAayushNessuna valutazione finora
- Analog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Documento23 pagineAnalog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Pahala SamosirNessuna valutazione finora
- IC Logic Families: Wen-Hung Liao, PH.DDocumento40 pagineIC Logic Families: Wen-Hung Liao, PH.DUmi SatiyahNessuna valutazione finora
- Linear Wave Shaping: Name of The Component/Equipment Specifications QuantityDocumento61 pagineLinear Wave Shaping: Name of The Component/Equipment Specifications QuantitySainadh YerrapragadaNessuna valutazione finora
- SMD-DatasheetDocumento8 pagineSMD-DatasheetAhmed Sherif CupoNessuna valutazione finora
- Transmission Line XDocumento21 pagineTransmission Line XKifaru Micro-electronicsNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Da EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Valutazione: 3 su 5 stelle3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Audio IC Circuits Manual: Newnes Circuits Manual SeriesDa EverandAudio IC Circuits Manual: Newnes Circuits Manual SeriesValutazione: 5 su 5 stelle5/5 (1)
- Algorithmic Game Theory and Scheduling: Eric Angel, Evripidis Bampis, Fanny Pascual IBISC, University of Evry, FranceDocumento40 pagineAlgorithmic Game Theory and Scheduling: Eric Angel, Evripidis Bampis, Fanny Pascual IBISC, University of Evry, FranceAnonymous zN7CjfgnENessuna valutazione finora
- DCT From NptelDocumento17 pagineDCT From NptelFarooq BhatNessuna valutazione finora
- Week 04, Linking and LoadingDocumento23 pagineWeek 04, Linking and LoadingAnonymous zN7CjfgnENessuna valutazione finora
- Synchronous & Asynchronous Data Transfer MethodsDocumento18 pagineSynchronous & Asynchronous Data Transfer MethodsAnonymous zN7CjfgnENessuna valutazione finora
- Mod251 Castro Fernandeza HM PDFDocumento16 pagineMod251 Castro Fernandeza HM PDFAnonymous zN7CjfgnENessuna valutazione finora
- Data and Computer Communications Chapter Comparing Circuit Switching and Packet SwitchingDocumento41 pagineData and Computer Communications Chapter Comparing Circuit Switching and Packet SwitchingAnonymous zN7CjfgnENessuna valutazione finora
- 11 MachineCodeDocumento32 pagine11 MachineCodeAnonymous zN7CjfgnENessuna valutazione finora
- DrFuzz SecDev 2016Documento121 pagineDrFuzz SecDev 2016Anonymous zN7CjfgnENessuna valutazione finora
- 0 Notes2 MemoryCPUDocumento186 pagine0 Notes2 MemoryCPUAnonymous zN7CjfgnENessuna valutazione finora
- Instruction Level ParallelismDocumento11 pagineInstruction Level ParallelismZarnigar Altaf95% (21)
- 8 Data Flow and Systolic Array ArchitecturesDocumento19 pagine8 Data Flow and Systolic Array ArchitecturesAnonymous zN7CjfgnENessuna valutazione finora
- Number (0-9) + %% (/ Skip Blanks /) (Number) (Sscanf (Yytext,"%lf",&yylval) Return INTEGER ) - (Return Yytext (0) ) /N (Return Yytext (0) )Documento2 pagineNumber (0-9) + %% (/ Skip Blanks /) (Number) (Sscanf (Yytext,"%lf",&yylval) Return INTEGER ) - (Return Yytext (0) ) /N (Return Yytext (0) )Anonymous zN7CjfgnENessuna valutazione finora
- 0 Notes2 MemoryCPUDocumento28 pagine0 Notes2 MemoryCPUBasharat AliNessuna valutazione finora
- Asynchronous Design MethodologiesDocumento90 pagineAsynchronous Design MethodologiesAnonymous zN7CjfgnENessuna valutazione finora
- DataflowDocumento119 pagineDataflowAnonymous zN7CjfgnENessuna valutazione finora
- CSL TN 99 1Documento20 pagineCSL TN 99 1Anonymous zN7CjfgnENessuna valutazione finora
- Lec 1e ElectricEDADocumento9 pagineLec 1e ElectricEDAAnonymous zN7CjfgnENessuna valutazione finora
- Bit masking and TRAP functions in LC3 assemblyDocumento5 pagineBit masking and TRAP functions in LC3 assemblyAnonymous zN7CjfgnENessuna valutazione finora
- Wallace Tree MultiplierDocumento11 pagineWallace Tree MultiplierdinuarslanNessuna valutazione finora
- Dataflow Languages: Prof. Stephen A. EdwardsDocumento54 pagineDataflow Languages: Prof. Stephen A. EdwardsAnonymous zN7CjfgnENessuna valutazione finora
- Verilog Breakdown PDFDocumento1 paginaVerilog Breakdown PDFAnonymous zN7CjfgnENessuna valutazione finora
- 2 Slides MemoryOrganisationDocumento11 pagine2 Slides MemoryOrganisationAnonymous zN7CjfgnENessuna valutazione finora
- Gridpix-Presenting Large Image Files Over The Internet: Satoshi Asami and David A. PattersonDocumento11 pagineGridpix-Presenting Large Image Files Over The Internet: Satoshi Asami and David A. PattersonAnonymous zN7CjfgnENessuna valutazione finora
- 07 SequentialVerilogDocumento6 pagine07 SequentialVerilogAshokkumar GanesanNessuna valutazione finora
- Residue Number Systems: Fast Illgorithms For Multiple Errors Detection and Correction in RedundantDocumento5 pagineResidue Number Systems: Fast Illgorithms For Multiple Errors Detection and Correction in RedundantAnonymous zN7CjfgnENessuna valutazione finora
- E, Electrical Field Gravity: E X Distance VoltageDocumento8 pagineE, Electrical Field Gravity: E X Distance VoltageAnonymous zN7CjfgnENessuna valutazione finora
- DDDDDDDocumento7 pagineDDDDDDAnonymous zN7CjfgnENessuna valutazione finora
- Lec 7c ProgrammingIODocumento7 pagineLec 7c ProgrammingIOAnonymous zN7CjfgnENessuna valutazione finora
- Lec 0b ReadingListDocumento2 pagineLec 0b ReadingListAnonymous zN7CjfgnENessuna valutazione finora
- PSCADDocumento10 paginePSCADkaran976Nessuna valutazione finora
- Analysis of Feeding Techniques for Rectangular Microstrip Patch AntennasDocumento30 pagineAnalysis of Feeding Techniques for Rectangular Microstrip Patch AntennasJojo SeanNessuna valutazione finora
- Ec2305 Transmission Lines & Wave Guides Question BankDocumento6 pagineEc2305 Transmission Lines & Wave Guides Question BankharvishNessuna valutazione finora
- Transmissionlines EMWTLDocumento85 pagineTransmissionlines EMWTLSRINIKHIL GollaNessuna valutazione finora
- Trans Line Calc Help 2Documento19 pagineTrans Line Calc Help 2Papun ScribdNessuna valutazione finora
- Power System LaboratoryDocumento34 paginePower System LaboratoryEdward CullenNessuna valutazione finora
- EE421 Propagation of Pulses On Transmission LinesDocumento9 pagineEE421 Propagation of Pulses On Transmission LinesManal SalimNessuna valutazione finora
- IEEE Transactions on Microwave Theory and Techniques Distributed Analog Phase Shifters with Low Insertion LossDocumento7 pagineIEEE Transactions on Microwave Theory and Techniques Distributed Analog Phase Shifters with Low Insertion Lossamirnader4Nessuna valutazione finora
- Transmission FundamentalsDocumento13 pagineTransmission FundamentalsAlpynNessuna valutazione finora
- Ee Power-Systems PDFDocumento61 pagineEe Power-Systems PDFJagan RampalliNessuna valutazione finora
- Brown Book Load Flow Analysis - Base Condition Result PDFDocumento20 pagineBrown Book Load Flow Analysis - Base Condition Result PDFyashida0% (1)
- FDTD Method For Lightning Surge Propagation of Power Transmission LinesDocumento5 pagineFDTD Method For Lightning Surge Propagation of Power Transmission LinesthesijNessuna valutazione finora
- Matlab Based Electromagnetics (Editable) - 2Documento405 pagineMatlab Based Electromagnetics (Editable) - 2Muhammad Saqib BaigNessuna valutazione finora
- Microwaves ExplainedDocumento76 pagineMicrowaves Explainedsuz_5100% (2)
- Microwave Transmission LineDocumento43 pagineMicrowave Transmission LineNasirul Islam SabujNessuna valutazione finora
- Radio Wave Propagation 2Documento80 pagineRadio Wave Propagation 2Juliana Nepembe100% (1)
- Ag2015-20 20150511Documento10 pagineAg2015-20 20150511sikander843562Nessuna valutazione finora
- Lecture Slides-Network AnalysisDocumento35 pagineLecture Slides-Network Analysisaසිල්වාNessuna valutazione finora
- What are scattering parameters? (S-parametersDocumento16 pagineWhat are scattering parameters? (S-parametersshaheerdurraniNessuna valutazione finora
- A Better Antenna Balun ZS1ANDocumento6 pagineA Better Antenna Balun ZS1ANlu1agpNessuna valutazione finora
- Microwave and Antenna Unit IDocumento105 pagineMicrowave and Antenna Unit IDeepak JoshiNessuna valutazione finora
- Method of Material CharacterizationDocumento29 pagineMethod of Material CharacterizationSums Zubair KaziNessuna valutazione finora
- Single-Ridge Waveguide T-Junctions For Compact MulDocumento7 pagineSingle-Ridge Waveguide T-Junctions For Compact MulCristina ValenciaNessuna valutazione finora
- Design A Circuit To Obtain This Characteristics WaveformDocumento4 pagineDesign A Circuit To Obtain This Characteristics WaveformSaraswathi AsirvathamNessuna valutazione finora
- High Voltage Engineering in Power Systems by Khalil DennoDocumento404 pagineHigh Voltage Engineering in Power Systems by Khalil DennoMc NicolasNessuna valutazione finora
- Symmetrical FaultDocumento54 pagineSymmetrical FaultshinkazamaNessuna valutazione finora
- JNTUK Kakinada Result of II B.Tech May 2016 ExamsDocumento62 pagineJNTUK Kakinada Result of II B.Tech May 2016 ExamssandeepkiranvNessuna valutazione finora
- Balun QEX Chris - Trask PDFDocumento13 pagineBalun QEX Chris - Trask PDFNestor Alberto EscalaNessuna valutazione finora