Potrebbero piacerti anche
- MVC - PDF MimoDocumento40 pagineMVC - PDF Mimoyumna munirNessuna valutazione finora
- Glock Armorer's Manual Gen 1-5 2018Documento140 pagineGlock Armorer's Manual Gen 1-5 2018Rachel Symes100% (3)
- Control - System - Chapter 4 - 8EDocumento35 pagineControl - System - Chapter 4 - 8EE24089046林雯琪Nessuna valutazione finora
- System ModelingDocumento110 pagineSystem ModelingYouness AITOUNYNessuna valutazione finora
- Block Diagram Simplification TechniquesDocumento22 pagineBlock Diagram Simplification TechniquesAhmed SaidNessuna valutazione finora
- Tu0403switcherki2009isic 140305063913 Phpapp02Documento40 pagineTu0403switcherki2009isic 140305063913 Phpapp02Udai ValluruNessuna valutazione finora
- Micom P125/P126/P127 Directional Overcurrent and Directional Earth Fault RelaysDocumento14 pagineMicom P125/P126/P127 Directional Overcurrent and Directional Earth Fault RelaysMohyedin Ganjian aboukheiliNessuna valutazione finora
- Control System Laboratory With Arduino: 2018 International Symposium On Computer, Consumer and Control (IS3C)Documento4 pagineControl System Laboratory With Arduino: 2018 International Symposium On Computer, Consumer and Control (IS3C)AfshaNessuna valutazione finora
- Lecture-7 Block Diagram Representation of Control SystemsDocumento41 pagineLecture-7 Block Diagram Representation of Control Systemsusama asifNessuna valutazione finora
- Anand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DDocumento8 pagineAnand Raghunathan Raghunathan@purdue - Edu: ECE 695R: S - C DAashishNessuna valutazione finora
- Analysis and Comparison of Universal GMC Biquad StructuresDocumento6 pagineAnalysis and Comparison of Universal GMC Biquad StructuresTomina FabiolaNessuna valutazione finora
- Presentation 4Documento57 paginePresentation 4Aphichaya thanchaiNessuna valutazione finora
- PartB Dynamics of Rotors and Fundations-1993Documento195 paginePartB Dynamics of Rotors and Fundations-1993Rohit TamrakarNessuna valutazione finora
- Ontrollability and Observability of Flip-Flops: Set Reset ClockDocumento22 pagineOntrollability and Observability of Flip-Flops: Set Reset ClockShashank S KudlurNessuna valutazione finora
- Control Chapter07 - GearTeamDocumento71 pagineControl Chapter07 - GearTeamNabilaSalsaNessuna valutazione finora
- Control of Multi Input Multi Output Processes: Cbe495 Lecture IiiDocumento17 pagineControl of Multi Input Multi Output Processes: Cbe495 Lecture IiiMark ClarkNessuna valutazione finora
- Electrostatics - INE SolutionsDocumento6 pagineElectrostatics - INE SolutionsParth KhandelwalNessuna valutazione finora
- 09 Gradient, Divergence and CurlDocumento12 pagine09 Gradient, Divergence and CurlAnustup MaityNessuna valutazione finora
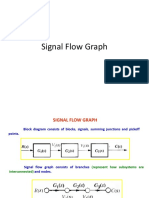
- Signal Flow GraphDocumento34 pagineSignal Flow GraphsuseelaksmanNessuna valutazione finora
- DSK - 4 - Reduction of Multiple SubsystemsDocumento24 pagineDSK - 4 - Reduction of Multiple Subsystemsandik yuliantoNessuna valutazione finora
- Lab 5, 6 and 7Documento9 pagineLab 5, 6 and 7SARANG ABBASINessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento17 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- Process ControlDocumento26 pagineProcess ControlMeenaNessuna valutazione finora
- Signal FlowDocumento34 pagineSignal FlowANKUSH 17BEC0253Nessuna valutazione finora
- BCS - 4 - Reduction of Multiple SubsystemsDocumento24 pagineBCS - 4 - Reduction of Multiple Subsystemsandik yuliantoNessuna valutazione finora
- Ch12-Dennis G. Zill - Warren S. Wright-Advanced Engineering Mathematics-Jones - Amp - Bartlett Learning (2012)Documento34 pagineCh12-Dennis G. Zill - Warren S. Wright-Advanced Engineering Mathematics-Jones - Amp - Bartlett Learning (2012)Nguyễn Chí NguyệnNessuna valutazione finora
- 2 Pole Synchronous Generator - Matlab QuestionDocumento3 pagine2 Pole Synchronous Generator - Matlab Questionahmedfhd10% (2)
- Ecuaciones Hidrulicas Formulario-Pract#3Documento2 pagineEcuaciones Hidrulicas Formulario-Pract#3Miguel Flores JimenezNessuna valutazione finora
- 5500 Purging System PDFDocumento5 pagine5500 Purging System PDFafiNessuna valutazione finora
- s21dac_cl06Documento4 pagines21dac_cl06Khhg AgddsNessuna valutazione finora
- The Schur-Cohn Algorithm: Appendix FDocumento8 pagineThe Schur-Cohn Algorithm: Appendix FAbhishek GangwarNessuna valutazione finora
- Exercise 5Documento14 pagineExercise 5L Quinto GutierrezNessuna valutazione finora
- Chapter 6 Time Domain Response Second Order SystemDocumento31 pagineChapter 6 Time Domain Response Second Order SystemZiad ObeidNessuna valutazione finora
- A Tutorial For Electronic Circuit ...Documento5 pagineA Tutorial For Electronic Circuit ...Chito June TumolvaNessuna valutazione finora
- Coop TrackingDocumento11 pagineCoop Trackingdaikini_Nessuna valutazione finora
- Concept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyDocumento23 pagineConcept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyHiral HiraniNessuna valutazione finora
- Lab ReportDocumento23 pagineLab ReportNAFIZ AHMEDNessuna valutazione finora
- Nyquist Plot Explained- Determine Stability of SystemsDocumento23 pagineNyquist Plot Explained- Determine Stability of Systemsrakesh chaturvediNessuna valutazione finora
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Documento91 pagineChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNessuna valutazione finora
- 531512p PDFDocumento164 pagine531512p PDFritchie ritchieNessuna valutazione finora
- CMPE 420 Advanced Logic Circuits Flip-Flops ExperimentDocumento10 pagineCMPE 420 Advanced Logic Circuits Flip-Flops ExperimentMary Cris BarredaNessuna valutazione finora
- Frequency Response: S A S UDocumento25 pagineFrequency Response: S A S Ubridget mutsutsururuNessuna valutazione finora
- Stability of Control Systems: Stable For ExampleDocumento41 pagineStability of Control Systems: Stable For Exampleተሸመ ገረዝጊሄርNessuna valutazione finora
- Dayalbagh Educational Institute (Deemed University), AgraDocumento3 pagineDayalbagh Educational Institute (Deemed University), AgraAkizuki TakaoNessuna valutazione finora
- Columns Checklist Translation in ArabicDocumento1 paginaColumns Checklist Translation in ArabicTariq HassanNessuna valutazione finora
- Field ENGINEER Quick REFDocumento8 pagineField ENGINEER Quick REFmasserschmidtNessuna valutazione finora
- JEE Main 2022 July Session 2 Shift-2 (DT 29-07-2022) ChemistryDocumento11 pagineJEE Main 2022 July Session 2 Shift-2 (DT 29-07-2022) ChemistryResonance EduventuresNessuna valutazione finora
- IC6701 May 18 With KeyDocumento14 pagineIC6701 May 18 With KeyAnonymous yO7rcec6vuNessuna valutazione finora
- MCH3008 Lecture Week 7Documento240 pagineMCH3008 Lecture Week 7moodyalsulaibiNessuna valutazione finora
- 4.0 Stability Analysis TechniquesDocumento21 pagine4.0 Stability Analysis TechniquesKristi GjokaNessuna valutazione finora
- Pneumatic Control System PDFDocumento12 paginePneumatic Control System PDFANANT KULKARNINessuna valutazione finora
- Feedback Control LectureDocumento16 pagineFeedback Control LecturepierrefreNessuna valutazione finora
- Quiz No. 11Documento1 paginaQuiz No. 11Muhammad Ridho DewantoNessuna valutazione finora
- Dwell Rocker LinkageDocumento12 pagineDwell Rocker LinkageAdrian Prashantha WeerakkodyNessuna valutazione finora
- PLL Fundamentals Moto App Note 535Documento13 paginePLL Fundamentals Moto App Note 535Stephen Dunifer100% (5)
- Osciloscopio Analógico Goldstar OS9020PDocumento71 pagineOsciloscopio Analógico Goldstar OS9020Pcharliexr100% (1)
- Tables of Coulomb Wave Functions: Whittaker FunctionsDa EverandTables of Coulomb Wave Functions: Whittaker FunctionsNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento33 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- Lec23 LcsDocumento33 pagineLec23 LcsZain AslamNessuna valutazione finora
- Design Lag Controller for 45° Phase MarginDocumento24 pagineDesign Lag Controller for 45° Phase MarginZain AslamNessuna valutazione finora
- Lec3 LcsDocumento33 pagineLec3 LcsZain AslamNessuna valutazione finora
- Nyquist Stability Criteria for Linear Control SystemsDocumento28 pagineNyquist Stability Criteria for Linear Control SystemsZain AslamNessuna valutazione finora
- TIME DOMAIN DESIGN OF CONTROL SYSTEMSDocumento39 pagineTIME DOMAIN DESIGN OF CONTROL SYSTEMSZain AslamNessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento17 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- Lec20 LcsDocumento26 pagineLec20 LcsZain AslamNessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento33 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- Chevening QuestionsDocumento1 paginaChevening QuestionsZain AslamNessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento23 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento30 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- Linear Control Systems Time Domain AnalysisDocumento24 pagineLinear Control Systems Time Domain AnalysisZain AslamNessuna valutazione finora
- Linear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadDocumento28 pagineLinear Control Systems: Ali Karimpour Associate Professor Ferdowsi University of MashhadZain AslamNessuna valutazione finora
- 12 07 12 10 43 28 1527 Thenmozhi PDFDocumento28 pagine12 07 12 10 43 28 1527 Thenmozhi PDFleonardo da vinci0% (1)
- Lec5 LcsDocumento32 pagineLec5 LcsZain AslamNessuna valutazione finora
- 12 07 12 10 43 28 1527 Thenmozhi PDFDocumento28 pagine12 07 12 10 43 28 1527 Thenmozhi PDFleonardo da vinci0% (1)
- Chapt#01Documento26 pagineChapt#01Zain Aslam100% (1)
- Introduction To CFD: Spring 2017Documento7 pagineIntroduction To CFD: Spring 2017Zain AslamNessuna valutazione finora
- ConclusionDocumento8 pagineConclusionZain AslamNessuna valutazione finora
- OM ProjectDocumento4 pagineOM ProjectZain AslamNessuna valutazione finora
- Mechanical Vibrations Basics ExplainedDocumento15 pagineMechanical Vibrations Basics ExplainedZain AslamNessuna valutazione finora
- FFC Internship 2016Documento1 paginaFFC Internship 2016makNessuna valutazione finora
- FFC Internship 2016Documento1 paginaFFC Internship 2016makNessuna valutazione finora
- MS 492 Operations Management: Capacity Planning For Products and ServicesDocumento30 pagineMS 492 Operations Management: Capacity Planning For Products and ServicesZain AslamNessuna valutazione finora
- GIKI-CPD Caldendar - 2015 Serial No 50 at PEB ListDocumento4 pagineGIKI-CPD Caldendar - 2015 Serial No 50 at PEB ListZain AslamNessuna valutazione finora
- How It Works Book of Great InventorsDocumento164 pagineHow It Works Book of Great InventorsZain Aslam100% (2)
- Dependency Management in A Large Agile EnvironmentDocumento6 pagineDependency Management in A Large Agile EnvironmentIQ3 Solutions GroupNessuna valutazione finora
- EE-421 Digital System Design Lab (Fall 2016) : Or, NotDocumento12 pagineEE-421 Digital System Design Lab (Fall 2016) : Or, NotBilal SiddiqueNessuna valutazione finora
- Robot Computing Level-2 (Arduino Blockly V.1)Documento35 pagineRobot Computing Level-2 (Arduino Blockly V.1)Wilman HadiNessuna valutazione finora
- System Analysis and DesignDocumento3 pagineSystem Analysis and DesignLakindu PathiaranaNessuna valutazione finora
- NI-Tutorial-6163, Build A Hybrid Control System With NI LabVIEWDocumento4 pagineNI-Tutorial-6163, Build A Hybrid Control System With NI LabVIEWgmagi169337Nessuna valutazione finora
- Minor Project PPT-FinalDocumento10 pagineMinor Project PPT-FinalPiyush AgrawalNessuna valutazione finora
- Nitrous oxide systems for automotive power boostsDocumento13 pagineNitrous oxide systems for automotive power boostsSambhav Golechha100% (1)
- Robert Smith: Manual Qa Tester IDocumento2 pagineRobert Smith: Manual Qa Tester ICHIRAG MATTANessuna valutazione finora
- 2 Stroke Tuning ComputationDocumento7 pagine2 Stroke Tuning ComputationJerald Peter VargasNessuna valutazione finora
- X Written Exam and Internal Assessment DetailsDocumento4 pagineX Written Exam and Internal Assessment DetailsSaswatNessuna valutazione finora
- Module Outline MIM737Documento2 pagineModule Outline MIM737Shame Bope100% (1)
- Introduction to Python Programming LanguageDocumento5 pagineIntroduction to Python Programming Languageshrutika nigamNessuna valutazione finora
- Resume-Mursal Ziai-2-2Documento2 pagineResume-Mursal Ziai-2-2Allan Sadomia Jr.Nessuna valutazione finora
- Prototyping: Human Computer InteractionDocumento8 paginePrototyping: Human Computer InteractionAlvo KamauNessuna valutazione finora
- Threat Model for E-Commerce SiteDocumento7 pagineThreat Model for E-Commerce SiteLRampaul0% (1)
- Fisma It Security Assessment Report TemplatesDocumento19 pagineFisma It Security Assessment Report TemplatesJoe OrlandoNessuna valutazione finora
- Skybox Firewall AssuranceDocumento4 pagineSkybox Firewall Assurancesanapala84Nessuna valutazione finora
- MNKFDocumento4 pagineMNKFMouzy McthyNessuna valutazione finora
- Operations Attachment 8 - Atlas Air Flight 3591 ACARS MessagesDocumento43 pagineOperations Attachment 8 - Atlas Air Flight 3591 ACARS MessagesGFNessuna valutazione finora
- Use Case DiagramDocumento4 pagineUse Case DiagramyashiNessuna valutazione finora
- Structured Design Significance and ApproachDocumento11 pagineStructured Design Significance and ApproachAbel MesfinNessuna valutazione finora
- CRDB Konnect - Test StrategyDocumento31 pagineCRDB Konnect - Test StrategymsvinuNessuna valutazione finora
- 10 Testcases - Login PageDocumento4 pagine10 Testcases - Login PageAgrim BishtNessuna valutazione finora
- Compiler Design: Dr. M. Moshiul Hoque Dept. of CSE, CUETDocumento53 pagineCompiler Design: Dr. M. Moshiul Hoque Dept. of CSE, CUETAYAN CHAKRABORTY 1604098Nessuna valutazione finora
- OV358EA-206904F Page 1 of 5 Engine Parts List #1Documento5 pagineOV358EA-206904F Page 1 of 5 Engine Parts List #1Milos PetrovicNessuna valutazione finora
- The Open University of Sri LankaDocumento3 pagineThe Open University of Sri LankaSumith PereraNessuna valutazione finora
- APQP Guideline For SuppliersDocumento60 pagineAPQP Guideline For SuppliersVenuNessuna valutazione finora
- Chapter 23 - Project Planning: Introduction and ProcessDocumento70 pagineChapter 23 - Project Planning: Introduction and Processlethall1ma0% (1)
- Sap S/4 Hana Ewm: Warehouse StructureDocumento72 pagineSap S/4 Hana Ewm: Warehouse StructureVictoria RivNessuna valutazione finora
- 2.3 Developing Information Systems-1Documento14 pagine2.3 Developing Information Systems-1Maria Belen CarrilloNessuna valutazione finora