Potrebbero piacerti anche
- Persamaan Gelombang SeismikDocumento24 paginePersamaan Gelombang SeismikFachri ZainuddinNessuna valutazione finora
- Robotics Manohar Notes Unit 3,4 & 5Documento19 pagineRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNessuna valutazione finora
- Tensor OperatorDocumento14 pagineTensor OperatorAtikshaNessuna valutazione finora
- Unit-4-2 PPT CSDocumento69 pagineUnit-4-2 PPT CS20R25A0420 KONDAMUDI VAMSI ANURAGNessuna valutazione finora
- OK Statics DynamicsDocumento21 pagineOK Statics DynamicsAlbert Alcantara BernardoNessuna valutazione finora
- Robotics: Kinematics, Dynamics and Motion Control Module - 5 VITDocumento60 pagineRobotics: Kinematics, Dynamics and Motion Control Module - 5 VITHarisankar R N R 21BRS1524Nessuna valutazione finora
- Chap 2 2 Mech Sys 2Documento49 pagineChap 2 2 Mech Sys 2Furkan DedeNessuna valutazione finora
- Forward and Inverse KinematicsDocumento41 pagineForward and Inverse KinematicsJorge CastilloNessuna valutazione finora
- 6 DynamicsDocumento93 pagine6 Dynamicsmurada_7Nessuna valutazione finora
- Lecture 6Documento32 pagineLecture 6Muhammad Usama Bin TahirNessuna valutazione finora
- Power System Stability - 2Documento15 paginePower System Stability - 2Om prakash GadgeNessuna valutazione finora
- LN2 (Electrical Systems)Documento38 pagineLN2 (Electrical Systems)Deniz DemirNessuna valutazione finora
- New KinematicsDocumento18 pagineNew KinematicsA Fo AnkitNessuna valutazione finora
- Langrangian MechanicsDocumento41 pagineLangrangian MechanicsLuthfiNessuna valutazione finora
- Inverted PendulumDocumento9 pagineInverted PendulumMahmoud Samir MahmoudNessuna valutazione finora
- Lecture 3Documento31 pagineLecture 3Wolf DragonneNessuna valutazione finora
- Operator (Physics) - WikipediaDocumento9 pagineOperator (Physics) - Wikipediaeimc2Nessuna valutazione finora
- Module 1: A Crash Course in Vectors Lecture 2: Coordinate SystemsDocumento10 pagineModule 1: A Crash Course in Vectors Lecture 2: Coordinate SystemsPraveen KumarNessuna valutazione finora
- Chapter Two: Mathematical Modeling of Physical SystemsDocumento29 pagineChapter Two: Mathematical Modeling of Physical SystemsWabe KemalNessuna valutazione finora
- Chapter 22: Continuous Symmetries and Conserved CurrentsDocumento7 pagineChapter 22: Continuous Symmetries and Conserved CurrentsphooolNessuna valutazione finora
- DS - Lec 1Documento7 pagineDS - Lec 1Sherif SaidNessuna valutazione finora
- Numerical Methods For Field Problems: Notes By: Kishore PochirajuDocumento37 pagineNumerical Methods For Field Problems: Notes By: Kishore PochirajuFredNessuna valutazione finora
- Velocity Kinematics PDFDocumento24 pagineVelocity Kinematics PDFfayyaz khanNessuna valutazione finora
- The Material Obeys Hooke's Law. 3. Forces Are Applied Only at The Ends of The Bar. 4. The Bar Supports Axial Loading Only Bending, Torsion, and Shear Are NotDocumento16 pagineThe Material Obeys Hooke's Law. 3. Forces Are Applied Only at The Ends of The Bar. 4. The Bar Supports Axial Loading Only Bending, Torsion, and Shear Are NotMuket AgmasNessuna valutazione finora
- 5 - Mathematical Modeling Based On Physics LawsDocumento37 pagine5 - Mathematical Modeling Based On Physics LawsJosueNessuna valutazione finora
- What Is Electronic Structure Theory?Documento11 pagineWhat Is Electronic Structure Theory?Vijay PradhanNessuna valutazione finora
- Ket Bra OperatorsDocumento33 pagineKet Bra OperatorsZaheerIqbalNessuna valutazione finora
- Lec 35Documento15 pagineLec 35venkatNessuna valutazione finora
- Simulation of Non Spherical Particles, From Orientation Representation To Computation of Moment of InertiaDocumento21 pagineSimulation of Non Spherical Particles, From Orientation Representation To Computation of Moment of InertiafconnerNessuna valutazione finora
- Co-Ordinate Systems: Module 3: Maxwell's Equations Lecture 18: Basics of Vector AlgebraDocumento9 pagineCo-Ordinate Systems: Module 3: Maxwell's Equations Lecture 18: Basics of Vector Algebrakunal chetryNessuna valutazione finora
- Lec18 PDFDocumento9 pagineLec18 PDFMukesh Kumar MeenaNessuna valutazione finora
- 5 - Mathematical Modeling Based On Physics LawsDocumento38 pagine5 - Mathematical Modeling Based On Physics LawsJosueNessuna valutazione finora
- Module 2. Work, Energy, and Conservation of EnergyDocumento95 pagineModule 2. Work, Energy, and Conservation of Energytiredstudent03Nessuna valutazione finora
- EE8409 Electromagnetic Theory: Dr. Shazzat HossainDocumento32 pagineEE8409 Electromagnetic Theory: Dr. Shazzat HossainMd Shazzat HossainNessuna valutazione finora
- Magnetic Fields-IIDocumento34 pagineMagnetic Fields-IIAhmed Ajmine NehalNessuna valutazione finora
- MBQT 4-5Documento40 pagineMBQT 4-5api-288833495Nessuna valutazione finora
- LM6 Work Energy and Energy Conservation GPHYS1Documento116 pagineLM6 Work Energy and Energy Conservation GPHYS1Marjorie KhylNessuna valutazione finora
- 1111Documento45 pagine1111Kasahun MekonnenNessuna valutazione finora
- EE381 Lec1 Week6Documento36 pagineEE381 Lec1 Week6Fatima IqbalNessuna valutazione finora
- Lecture 3 Simple Hermonic MotionDocumento26 pagineLecture 3 Simple Hermonic MotionAryan MahmudNessuna valutazione finora
- FM1 Chap5Documento33 pagineFM1 Chap5Faheem aktharNessuna valutazione finora
- Review of Statics Solutions For ExamplesDocumento53 pagineReview of Statics Solutions For ExamplesAnisyahira khalidNessuna valutazione finora
- COE 2001 Statics - Lecture 1 - IntroductionDocumento22 pagineCOE 2001 Statics - Lecture 1 - Introductionremino1Nessuna valutazione finora
- P, C, CP, and TDocumento32 pagineP, C, CP, and TFlorence Arielle SanchezNessuna valutazione finora
- Slva 589Documento12 pagineSlva 589Omar MohamedNessuna valutazione finora
- Economy DispatchDocumento36 pagineEconomy Dispatchwise manNessuna valutazione finora
- MATH111: Derivatives of Transcendental FunctionsDocumento83 pagineMATH111: Derivatives of Transcendental FunctionsRica Marie SanicoNessuna valutazione finora
- Approximate Solution of Navier Stokes EquationDocumento58 pagineApproximate Solution of Navier Stokes EquationsineNessuna valutazione finora
- Inverse Kinematics NotesDocumento70 pagineInverse Kinematics Noteskomailhaiderz123Nessuna valutazione finora
- Unit 2Documento19 pagineUnit 2AnasNessuna valutazione finora
- Industrial Robot AnalysisDocumento20 pagineIndustrial Robot AnalysiselkhawadNessuna valutazione finora
- Mems 3Documento51 pagineMems 3Upendra KashniyalNessuna valutazione finora
- Lecture 4Documento34 pagineLecture 4Muhammad Usama Bin TahirNessuna valutazione finora
- 17-3-2020 Chapter 4 Forward Kinematics Lecture 2 PDFDocumento20 pagine17-3-2020 Chapter 4 Forward Kinematics Lecture 2 PDFMoathNessuna valutazione finora
- Lecture 3 LSE and DEMDocumento14 pagineLecture 3 LSE and DEMdaniel.lim7725Nessuna valutazione finora
- Lec 9B - Bayesian Learning IIDocumento35 pagineLec 9B - Bayesian Learning IITalha YousufNessuna valutazione finora
- Literature Search On Hybrid Brain Computer Interface Using EEG and fNIRSDocumento10 pagineLiterature Search On Hybrid Brain Computer Interface Using EEG and fNIRSTalha YousufNessuna valutazione finora
- RM PDFDocumento1 paginaRM PDFTalha YousufNessuna valutazione finora
- Data SetDocumento1.206 pagineData SetTalha YousufNessuna valutazione finora
- Project ReportDocumento1 paginaProject ReportTalha YousufNessuna valutazione finora
- Robot Mechanics and Control RIME-811: Dr. Hasan SajidDocumento34 pagineRobot Mechanics and Control RIME-811: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- Arduino TimersDocumento31 pagineArduino TimersTalha YousufNessuna valutazione finora
- Model 1Documento1 paginaModel 1Sharath ChandraNessuna valutazione finora
- Chapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumDocumento11 pagineChapter 3 - Support Vector Machine With Math. - Deep Math Machine Learning - Ai - MediumTalha YousufNessuna valutazione finora
- Binomial Distribution and ApplicationsDocumento1 paginaBinomial Distribution and ApplicationsTalha YousufNessuna valutazione finora
- CourseraProgWeek1Instruction PDFDocumento2 pagineCourseraProgWeek1Instruction PDFTalha YousufNessuna valutazione finora
- Model 1Documento1 paginaModel 1Sharath ChandraNessuna valutazione finora
- Foundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Documento6 pagineFoundations of Artificial Intelligence: Cis20.2-Spring2010-Sklar-Leciv.1 1 Cis20.2-Spring2010-Sklar-Leciv.1 2Talha YousufNessuna valutazione finora
- Binomial Distribution and ApplicationsDocumento23 pagineBinomial Distribution and Applicationskirana_patrolina100% (2)
- Model 1Documento1 paginaModel 1Sharath ChandraNessuna valutazione finora
- Coursera Prog Week 1 InstructionDocumento2 pagineCoursera Prog Week 1 InstructionTalha YousufNessuna valutazione finora
- Time and Motion: Dr. Hasan SajidDocumento36 pagineTime and Motion: Dr. Hasan SajidTalha YousufNessuna valutazione finora
- MLE For GaussianDocumento2 pagineMLE For GaussianTalha YousufNessuna valutazione finora
- Bayesian Nonparametrics and The Probabilistic Approach To ModellingDocumento27 pagineBayesian Nonparametrics and The Probabilistic Approach To ModellingTalha YousufNessuna valutazione finora
- SVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneDocumento13 pagineSVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneTalha YousufNessuna valutazione finora
- Lec 9B - Bayesian Learning IIDocumento35 pagineLec 9B - Bayesian Learning IITalha YousufNessuna valutazione finora
- Binomial DistributionDocumento11 pagineBinomial DistributionAnjalee PrabhaNessuna valutazione finora
- Support Vector Machines PDFDocumento37 pagineSupport Vector Machines PDFTalha YousufNessuna valutazione finora
- Recommendation LetterDocumento4 pagineRecommendation LetterTalha YousufNessuna valutazione finora
- PythonForDataScience PDFDocumento1 paginaPythonForDataScience PDFMaisarah Mohd PauziNessuna valutazione finora
- SVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneDocumento13 pagineSVM Tutorial: SVM - Understanding The Math - The Optimal HyperplaneTalha YousufNessuna valutazione finora
- Top 101 High Frequency GRE Words - CrunchPrep GREDocumento12 pagineTop 101 High Frequency GRE Words - CrunchPrep GRETalha Yousuf100% (2)
- Medical CertificateDocumento1 paginaMedical CertificateIrtiza HussainNessuna valutazione finora
- How Do I Choose A Graduate SchoolDocumento2 pagineHow Do I Choose A Graduate SchoolTalha YousufNessuna valutazione finora
- FINAL VERSION On Assessment Tool For CDCs LCs Sept. 23 2015Documento45 pagineFINAL VERSION On Assessment Tool For CDCs LCs Sept. 23 2015Edmar Cielo SarmientoNessuna valutazione finora
- You Can't Blame A FireDocumento8 pagineYou Can't Blame A FireMontana QuarterlyNessuna valutazione finora
- Legrand Price List-01 ST April-2014Documento144 pagineLegrand Price List-01 ST April-2014Umesh SutharNessuna valutazione finora
- Forensic IR-UV-ALS Directional Reflected Photography Light Source Lab Equipment OR-GZP1000Documento3 pagineForensic IR-UV-ALS Directional Reflected Photography Light Source Lab Equipment OR-GZP1000Zhou JoyceNessuna valutazione finora
- Rapp 2011 TEREOS GBDocumento58 pagineRapp 2011 TEREOS GBNeda PazaninNessuna valutazione finora
- Assessing Apical PulseDocumento5 pagineAssessing Apical PulseMatthew Ryan100% (1)
- Canon I-SENSYS MF411dw Parts CatalogDocumento79 pagineCanon I-SENSYS MF411dw Parts Catalogmarian100% (1)
- BV DoshiDocumento6 pagineBV DoshiNimNessuna valutazione finora
- Tenses English Grammar PresentationDocumento14 pagineTenses English Grammar PresentationMaz Gedi60% (5)
- Addendum ESIA Oct 2019Documento246 pagineAddendum ESIA Oct 2019melkamuNessuna valutazione finora
- PM 50 Service ManualDocumento60 paginePM 50 Service ManualLeoni AnjosNessuna valutazione finora
- Diagnosis ListDocumento1 paginaDiagnosis ListSenyorita KHayeNessuna valutazione finora
- Acceptable Use Policy 08 19 13 Tia HadleyDocumento2 pagineAcceptable Use Policy 08 19 13 Tia Hadleyapi-238178689Nessuna valutazione finora
- 2015 NSPC Proposed Changes Book PDFDocumento268 pagine2015 NSPC Proposed Changes Book PDFMichelle Pinohermoso JabatNessuna valutazione finora
- CHN Nutri LabDocumento4 pagineCHN Nutri LabMushy_ayaNessuna valutazione finora
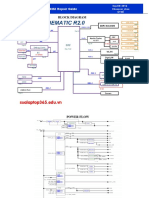
- Asus x453Documento5 pagineAsus x453Rhiry Ntuh AthryNessuna valutazione finora
- Measuring Road Roughness by Static Level Method: Standard Test Method ForDocumento6 pagineMeasuring Road Roughness by Static Level Method: Standard Test Method ForDannyChaconNessuna valutazione finora
- Philippine Education Deteriorating - EditedDocumento3 paginePhilippine Education Deteriorating - EditedRukimi Yamato100% (1)
- SY22-23+Annual+Report FinalDocumento47 pagineSY22-23+Annual+Report FinalNorus LizaNessuna valutazione finora
- Joomag 2020 06 12 27485398153Documento2 pagineJoomag 2020 06 12 27485398153Vincent Deodath Bang'araNessuna valutazione finora
- WSD M1a283 B50Documento9 pagineWSD M1a283 B50'Lampa'Nessuna valutazione finora
- Economics Exam Technique GuideDocumento21 pagineEconomics Exam Technique Guidemalcewan100% (5)
- PDF BrochureDocumento50 paginePDF BrochureAnees RanaNessuna valutazione finora
- OBOE GougerDocumento2 pagineOBOE GougerCarlos GaldámezNessuna valutazione finora
- Ode To The West WindDocumento4 pagineOde To The West WindCharis Mae DimaculanganNessuna valutazione finora
- Eje Delantero Fxl14 (1) .6Documento2 pagineEje Delantero Fxl14 (1) .6Lenny VirgoNessuna valutazione finora
- Handbook of Storage Tank Systems: Codes, Regulations, and DesignsDocumento4 pagineHandbook of Storage Tank Systems: Codes, Regulations, and DesignsAndi RachmanNessuna valutazione finora
- Wordbank 15 Coffee1Documento2 pagineWordbank 15 Coffee1akbal13Nessuna valutazione finora
- Kootenay Lake Pennywise April 26, 2016Documento48 pagineKootenay Lake Pennywise April 26, 2016Pennywise PublishingNessuna valutazione finora
- Worked Solution Paper5 A LevelDocumento8 pagineWorked Solution Paper5 A LevelBhoosan AncharazNessuna valutazione finora