Potrebbero piacerti anche
- Solutions of David K Cheng PDFDocumento70 pagineSolutions of David K Cheng PDFDharneeshkarDandyNessuna valutazione finora
- ResponDocumento4 pagineResponFelix PalanganNessuna valutazione finora
- Automatic Control: Radouan Ait Mouha ID:12190210101Documento19 pagineAutomatic Control: Radouan Ait Mouha ID:12190210101Redouan Ait MouhaNessuna valutazione finora
- y = Ay. A A = , λ, λ: 1 orbitsDocumento7 paginey = Ay. A A = , λ, λ: 1 orbitsVera DikaiouliaNessuna valutazione finora
- Ecu 4Documento3 pagineEcu 4Angie Lorena Cruz LeonNessuna valutazione finora
- Tutorial SVR01Documento73 pagineTutorial SVR01albaroNessuna valutazione finora
- Passive Reinforcement: A A A ADocumento1 paginaPassive Reinforcement: A A A AalexNessuna valutazione finora
- %dit Ifft: All All 'Enter No of Points' 'Enter Array in Bit Reversal Order'Documento8 pagine%dit Ifft: All All 'Enter No of Points' 'Enter Array in Bit Reversal Order'Saravana JaiNessuna valutazione finora
- Task 1:: A G (S) s+1Documento23 pagineTask 1:: A G (S) s+1Tajdar HaiderNessuna valutazione finora
- Laporan Kendali Cerdas Ke-3Documento3 pagineLaporan Kendali Cerdas Ke-3SartoNessuna valutazione finora
- 19MAT209 3 MVUO Geometrical AnalyticalSolnsDocumento16 pagine19MAT209 3 MVUO Geometrical AnalyticalSolnsSurya KotamrajaNessuna valutazione finora
- L5 2nd Order Charac Contd, Dominant PolesDocumento16 pagineL5 2nd Order Charac Contd, Dominant Polesalex carterNessuna valutazione finora
- ST LineDocumento2 pagineST LineSwaroop MallickNessuna valutazione finora
- PG 0164Documento1 paginaPG 0164e-a-oNessuna valutazione finora
- EEE 4601 (Signals & Systems)Documento84 pagineEEE 4601 (Signals & Systems)AONessuna valutazione finora
- Plot Qnorm Plot NormalDocumento11 paginePlot Qnorm Plot NormalHaydarRPNessuna valutazione finora
- Digital Filter 2Documento18 pagineDigital Filter 2setsindia3735Nessuna valutazione finora
- Julia (0.0) (0.66) (Galaxy)Documento1 paginaJulia (0.0) (0.66) (Galaxy)CaptainSparrowNessuna valutazione finora
- Commands Plotting Root LocusDocumento5 pagineCommands Plotting Root LocusShivangi ThakkerNessuna valutazione finora
- The Perceptron Exercises: Part I: Pattern Weight X Value Weight Y Value SSE 0Documento3 pagineThe Perceptron Exercises: Part I: Pattern Weight X Value Weight Y Value SSE 0Hans UsurinNessuna valutazione finora
- Lecture 5-6-7-8 Root LocusDocumento41 pagineLecture 5-6-7-8 Root LocusMeer Zafarullah NoohaniNessuna valutazione finora
- Experiment No: 06: Roll No:07 Group No:04 PROGRAM: To Generate Line Codes and Plot Their PSDDocumento6 pagineExperiment No: 06: Roll No:07 Group No:04 PROGRAM: To Generate Line Codes and Plot Their PSDshakilNessuna valutazione finora
- Engineers Guide To Matlab 3rd Edition Magrab Solutions Manual Full Chapter PDFDocumento34 pagineEngineers Guide To Matlab 3rd Edition Magrab Solutions Manual Full Chapter PDFanselmthangxu5eo0100% (14)
- Exp-7 PlotDocumento4 pagineExp-7 PlotSwaroop MallickNessuna valutazione finora
- 21MAT117 12 MIS2 Hessian MUOptimizationDocumento23 pagine21MAT117 12 MIS2 Hessian MUOptimizationVamsi Vardhan ReddyNessuna valutazione finora
- LAB: Z-Transform and Its PropertiesDocumento3 pagineLAB: Z-Transform and Its PropertiesMA KhanNessuna valutazione finora
- CH4-Root Locus Design PDFDocumento11 pagineCH4-Root Locus Design PDFLove StrikeNessuna valutazione finora
- Maximum Likelihood Parameter Estimates Using Multiple Stripes Analysis Data Jack Baker July 15, 2011Documento4 pagineMaximum Likelihood Parameter Estimates Using Multiple Stripes Analysis Data Jack Baker July 15, 2011Joseph772Nessuna valutazione finora
- Problem 1 Matlab CodeDocumento7 pagineProblem 1 Matlab CodeHamad ZaheerNessuna valutazione finora
- Phase 2 Orbit 5Documento7 paginePhase 2 Orbit 5dckristantoNessuna valutazione finora
- sin (2 πt+π 2) sin (2 πt−π 2)Documento13 paginesin (2 πt+π 2) sin (2 πt−π 2)Huba KhalidNessuna valutazione finora
- Introduction To WebotsDocumento29 pagineIntroduction To Webotsrounakb sanghviNessuna valutazione finora
- Lab 6Documento11 pagineLab 6pkrsuresh2013100% (1)
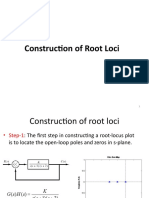
- Construction of Root LociDocumento36 pagineConstruction of Root LociMs. Punjan DohareNessuna valutazione finora
- Robot Arm DesignerDocumento16 pagineRobot Arm DesignerEdu PereraNessuna valutazione finora
- Stiffness MethodDocumento1 paginaStiffness MethodasluznetNessuna valutazione finora
- Dok 2Documento14 pagineDok 21C23 MUHAMMAD NAUFAL MAHARDIKANessuna valutazione finora
- Data Collection: Filename: Presents/Cursus/Cursus - Tofd - Engels/ /09 Datacollectie - Ukrev4Documento30 pagineData Collection: Filename: Presents/Cursus/Cursus - Tofd - Engels/ /09 Datacollectie - Ukrev4Rupam BaruahNessuna valutazione finora
- EPF3109 TOPIC2 InOutput BDocumento39 pagineEPF3109 TOPIC2 InOutput BAinFatihahNessuna valutazione finora
- Modeling Surface Variations For Flexible Assemblies: by Shrinivas Soman Unigraphics SolutionsDocumento18 pagineModeling Surface Variations For Flexible Assemblies: by Shrinivas Soman Unigraphics SolutionspalaniNessuna valutazione finora
- Control Theory 1: Performance of Underdamped Second Order Control SystemsDocumento5 pagineControl Theory 1: Performance of Underdamped Second Order Control SystemsnctgayarangaNessuna valutazione finora
- Program 1:: Figure 1 Figure 2Documento5 pagineProgram 1:: Figure 1 Figure 2TRUE LOVERSNessuna valutazione finora
- Rlocus 2Documento1 paginaRlocus 2ritesh samantaNessuna valutazione finora
- Rlocus 3Documento1 paginaRlocus 3ritesh samantaNessuna valutazione finora
- Control System Design Course Work LLDocumento9 pagineControl System Design Course Work LLSaqib NaseerNessuna valutazione finora
- Identifikasi Data Time Series PlotDocumento17 pagineIdentifikasi Data Time Series PlotDestiadiNessuna valutazione finora
- Locating Poles and Zeros On S-Plane and Z-PlaneDocumento1 paginaLocating Poles and Zeros On S-Plane and Z-PlaneHafizuddinMahmadNessuna valutazione finora
- Erfc (Z) Effect of Restriction On Front Movement On Heat Loss To OverburdenDocumento4 pagineErfc (Z) Effect of Restriction On Front Movement On Heat Loss To OverburdenAditya SinghNessuna valutazione finora
- Lecture 4 Introduction To CompensationDocumento21 pagineLecture 4 Introduction To CompensationNaddaa MohamedNessuna valutazione finora
- Numerical Modeling and AVT DataDocumento22 pagineNumerical Modeling and AVT DataSanjoy Kumar BhowmikNessuna valutazione finora
- Root Locus Notes - FullDocumento59 pagineRoot Locus Notes - Fullrahulsrinivas kNessuna valutazione finora
- Understanding IIR (Infinite Impulse Response) Filters - An Intuitive Approach by Dan Lavry, Lavry EngineeringDocumento5 pagineUnderstanding IIR (Infinite Impulse Response) Filters - An Intuitive Approach by Dan Lavry, Lavry EngineeringahmedmragabNessuna valutazione finora
- Module 5: Design of Sampled Data Control Systems: Lecture Note 3Documento6 pagineModule 5: Design of Sampled Data Control Systems: Lecture Note 3Yuv RajNessuna valutazione finora
- Goal SeekDocumento10 pagineGoal SeekMarko CupacNessuna valutazione finora
- 24.autoencoder Based Galaxy Image Search - SukKimDocumento29 pagine24.autoencoder Based Galaxy Image Search - SukKimMuskan ChaudharyNessuna valutazione finora
- Grafik Isoterm Adsorpsi Larutan CH3COOH Terhadap Karbon AktifDocumento3 pagineGrafik Isoterm Adsorpsi Larutan CH3COOH Terhadap Karbon AktifAdinda SaraswatiNessuna valutazione finora
- Clustering Case Study: Forest Cover TypesDocumento10 pagineClustering Case Study: Forest Cover TypesAlee LópezNessuna valutazione finora
- Polymer Solutions: An Introduction to Physical PropertiesDa EverandPolymer Solutions: An Introduction to Physical PropertiesNessuna valutazione finora
- Software ReqDocumento4 pagineSoftware ReqDharneeshkarDandyNessuna valutazione finora
- SR Latch:: State S R Q DescriptionDocumento2 pagineSR Latch:: State S R Q DescriptionDharneeshkarDandyNessuna valutazione finora
- Assignment 2Documento4 pagineAssignment 2DharneeshkarDandyNessuna valutazione finora
- Routing and Switching Essentials (Version 6.0) - RSE 6.0 Chapter 2 ExamDocumento1 paginaRouting and Switching Essentials (Version 6.0) - RSE 6.0 Chapter 2 ExamDharneeshkarDandyNessuna valutazione finora
- Chapter 7 For StudentsDocumento21 pagineChapter 7 For StudentsDharneeshkarDandyNessuna valutazione finora
- Addressing Table: Issues Found: 1. Pc1 Ip Address 2. Pc4 Default Gateway 3. S1 Default GatewayDocumento1 paginaAddressing Table: Issues Found: 1. Pc1 Ip Address 2. Pc4 Default Gateway 3. S1 Default GatewayDharneeshkarDandyNessuna valutazione finora
- In The Koran Are The Words: "We Have Created Every Living Thing From Water"Documento7 pagineIn The Koran Are The Words: "We Have Created Every Living Thing From Water"DharneeshkarDandyNessuna valutazione finora
- 15ECE211 Electronic CircuitsDocumento3 pagine15ECE211 Electronic CircuitsDharneeshkarDandyNessuna valutazione finora
- Fourier Properties Face DetectionDocumento4 pagineFourier Properties Face DetectionDharneeshkarDandyNessuna valutazione finora
- Packet Tracer - Skills Integration Challenge: Addressing TableDocumento3 paginePacket Tracer - Skills Integration Challenge: Addressing TableDharneeshkarDandyNessuna valutazione finora
- Basic Flip Flops in Digital ElectronicsDocumento10 pagineBasic Flip Flops in Digital ElectronicsDharneeshkarDandyNessuna valutazione finora
- Spreadsheet Practice Exercises-2016FDocumento40 pagineSpreadsheet Practice Exercises-2016FDharneeshkarDandy92% (12)
- The Festival of LightsDocumento3 pagineThe Festival of LightsDharneeshkarDandyNessuna valutazione finora
- Solutions of David K Cheng PDFDocumento70 pagineSolutions of David K Cheng PDFDharneeshkarDandyNessuna valutazione finora
- 7.atomic and Molecular Physics - NET-JRF - VKSDocumento17 pagine7.atomic and Molecular Physics - NET-JRF - VKSsuryaNessuna valutazione finora
- Week 1 Part I Capacitors June 05Documento41 pagineWeek 1 Part I Capacitors June 05Marty J. SmithNessuna valutazione finora
- Eee589 Analog-ic-Design Eth 2.00 Ac29Documento2 pagineEee589 Analog-ic-Design Eth 2.00 Ac29dileshwarNessuna valutazione finora
- MFL Compendium 002Documento59 pagineMFL Compendium 002kingston67% (3)
- A - ELSB - Cat - 2020 - 02 - Residual Current Devices - LRDocumento150 pagineA - ELSB - Cat - 2020 - 02 - Residual Current Devices - LRdoaa masNessuna valutazione finora
- Reviewer For Physics Pt4Documento49 pagineReviewer For Physics Pt4King Paulo67% (3)
- The Z80 MicroprocessorDocumento49 pagineThe Z80 MicroprocessorDuncan Jobando100% (1)
- AppleDocumento22 pagineApplePhuong Nhung100% (1)
- ECE 223 IntroDocumento5 pagineECE 223 IntroReynel Isla AlboNessuna valutazione finora
- Instuments Types With ExamplesDocumento9 pagineInstuments Types With ExamplesAmmar KhalidNessuna valutazione finora
- Cutting Program: W04FR144-07 W04FR144-07 W04FR144-07 W04FR144-07 W04FR144-07Documento2 pagineCutting Program: W04FR144-07 W04FR144-07 W04FR144-07 W04FR144-07 W04FR144-07frodrez_931726Nessuna valutazione finora
- 1977 Motorola M2900 TTL Processor Family 2edDocumento70 pagine1977 Motorola M2900 TTL Processor Family 2edLovely DilipNessuna valutazione finora
- 132kV Connection Guide Version 9Documento44 pagine132kV Connection Guide Version 9ElwanNessuna valutazione finora
- Relay Settings For MotorsDocumento8 pagineRelay Settings For MotorsArvind KumawatNessuna valutazione finora
- Lecture Notes For Physics 229: Quantum Information and ComputationDocumento321 pagineLecture Notes For Physics 229: Quantum Information and ComputationIvan CheungNessuna valutazione finora
- Construction of A Fuel Less Generator: J.O Otulana, A.A Akinwunmi, J.A Awoyemi, M.B Adeleke, M.I Efunbote OrelajaDocumento5 pagineConstruction of A Fuel Less Generator: J.O Otulana, A.A Akinwunmi, J.A Awoyemi, M.B Adeleke, M.I Efunbote OrelajapallassiNessuna valutazione finora
- ST ND RD TH ND TH TH THDocumento4 pagineST ND RD TH ND TH TH THprdpks2000Nessuna valutazione finora
- Design Software 1Documento2 pagineDesign Software 1anbarasuval84Nessuna valutazione finora
- History of Time WallDocumento1 paginaHistory of Time WallHm HaiNessuna valutazione finora
- PT Aky Electronics Indonesia - Google SearchDocumento1 paginaPT Aky Electronics Indonesia - Google SearchFebry N.HNessuna valutazione finora
- Lourve: Product InformationDocumento8 pagineLourve: Product Informationntt_121987Nessuna valutazione finora
- Scrolling Message Display - Project Report - Nov 15, 2011Documento71 pagineScrolling Message Display - Project Report - Nov 15, 2011Arun Arya33% (3)
- Implementation of SPWM Technique For 3 - VSI Using STM32F4 Discovery Board Interfaced With MATLABDocumento5 pagineImplementation of SPWM Technique For 3 - VSI Using STM32F4 Discovery Board Interfaced With MATLABkiratNessuna valutazione finora
- APC Smart-UPS RC 2000VA 230V: Technical SpecificationsDocumento3 pagineAPC Smart-UPS RC 2000VA 230V: Technical SpecificationsrheriNessuna valutazione finora
- GR-SXM58 GR-SXM48 GR-FXM38 GR-SX24 GR-FX14: Compact Vhs CamcorderDocumento2 pagineGR-SXM58 GR-SXM48 GR-FXM38 GR-SX24 GR-FX14: Compact Vhs CamcorderMaryNessuna valutazione finora
- Surface Vehicle InformationDocumento7 pagineSurface Vehicle InformationanupthattaNessuna valutazione finora
- 3GPP TR 29.998-05-1: Technical ReportDocumento25 pagine3GPP TR 29.998-05-1: Technical Reportdzo007Nessuna valutazione finora
- Prime Mover Synchronous Generator Electrical GridDocumento12 paginePrime Mover Synchronous Generator Electrical GridReymart ManablugNessuna valutazione finora
- Selectivity Catalog Domestic 291015Documento12 pagineSelectivity Catalog Domestic 291015Samarendu BaulNessuna valutazione finora
- B.tech It Uss015 Result All Sem Dec13Documento55 pagineB.tech It Uss015 Result All Sem Dec13Praveen DhawanNessuna valutazione finora