
Potrebbero piacerti anche
- Constraint Satisfaction Problems: Slides by Prof WELLINGDocumento39 pagineConstraint Satisfaction Problems: Slides by Prof WELLINGProf. AHMED RIMAZ FAIZABADINessuna valutazione finora
- Lecture 6aDocumento54 pagineLecture 6aSadia NiazNessuna valutazione finora
- Constraint Satisfaction Problems: Section 1 - 3Documento44 pagineConstraint Satisfaction Problems: Section 1 - 3Tariq IqbalNessuna valutazione finora
- Chapter - 5-Constraint Satisfaction Problems-CspDocumento25 pagineChapter - 5-Constraint Satisfaction Problems-CspabdisamedNessuna valutazione finora
- A General Introduction To Artificial IntelligenceDocumento58 pagineA General Introduction To Artificial IntelligenceÁnh PhạmNessuna valutazione finora
- Constraint Satisfaction ProblemsDocumento35 pagineConstraint Satisfaction Problemsরাফিদ আহমেদNessuna valutazione finora
- Constraint Satisfaction Problems: Unit 3Documento28 pagineConstraint Satisfaction Problems: Unit 3youtube channelNessuna valutazione finora
- Constraint Satisfaction ProblemsDocumento26 pagineConstraint Satisfaction Problems124 SHAIL SINGHNessuna valutazione finora
- 05 CSPDocumento28 pagine05 CSPNada ElokabyNessuna valutazione finora
- Constraint Satisfaction Problems: Dr. Shahnawaz QureshiDocumento44 pagineConstraint Satisfaction Problems: Dr. Shahnawaz QureshiSami AhmedNessuna valutazione finora
- Constraint Satisfaction ProblemDocumento43 pagineConstraint Satisfaction ProblemLucky Asr AwaisNessuna valutazione finora
- CS 188: Artificial Intelligence: Constraint Satisfaction ProblemsDocumento43 pagineCS 188: Artificial Intelligence: Constraint Satisfaction ProblemsSufi NoraniNessuna valutazione finora
- Constraint Satisfaction Problems: Soup Chicken Dish AppetizerDocumento45 pagineConstraint Satisfaction Problems: Soup Chicken Dish AppetizerAyush SethiNessuna valutazione finora
- Artificial Intelligence: Constraint Satisfaction ProblemsDocumento51 pagineArtificial Intelligence: Constraint Satisfaction Problemssurya kiranNessuna valutazione finora
- 5 CSPDocumento70 pagine5 CSPGUNEET SURANessuna valutazione finora
- Constraint Satisfaction Problems (CSP)Documento36 pagineConstraint Satisfaction Problems (CSP)ShamsNessuna valutazione finora
- Constraint Satisfaction Problems: Section 1 - 3Documento34 pagineConstraint Satisfaction Problems: Section 1 - 3chakravarthyashokNessuna valutazione finora
- Name: R.Viswaesvaran - Class: 11a - Sns AcademyDocumento22 pagineName: R.Viswaesvaran - Class: 11a - Sns AcademyViswa DexterNessuna valutazione finora
- M 1. S 8 or S 9. Etc. (Derive More!)Documento5 pagineM 1. S 8 or S 9. Etc. (Derive More!)Eloy VegaNessuna valutazione finora
- JU Ch5Documento26 pagineJU Ch5abebemako302Nessuna valutazione finora
- CspsDocumento52 pagineCspsJetlin C PNessuna valutazione finora
- Sp14 Cs188 Lecture 4 - Csps IDocumento43 pagineSp14 Cs188 Lecture 4 - Csps IYash OzaNessuna valutazione finora
- Unit 2 Constraint Satisfaction ProblemsDocumento52 pagineUnit 2 Constraint Satisfaction ProblemsManthan BosamiyaNessuna valutazione finora
- Constraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Documento55 pagineConstraint Satisfaction Problems: A Fast General Survey: CIS 391 - Intro To AI 1Gomathi ShanmugamNessuna valutazione finora
- Artificial Intelligence: Russell & Norvig, AI: A Modern Approach, 3rd EdDocumento40 pagineArtificial Intelligence: Russell & Norvig, AI: A Modern Approach, 3rd EdRafinNessuna valutazione finora
- m5 CSPDocumento34 paginem5 CSPanushanallagasu851Nessuna valutazione finora
- Lec 4Documento33 pagineLec 4Vân AnhNessuna valutazione finora
- Constraint Satisfaction Problems: Foundations of Artificial IntelligenceDocumento62 pagineConstraint Satisfaction Problems: Foundations of Artificial Intelligence林佳緯Nessuna valutazione finora
- Constraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelDocumento55 pagineConstraint Satisfaction Problem: Teknik Elektro Fakultas Informatika Dan Teknik Elektro Institut Teknologi DelRonaldo PitersonNessuna valutazione finora
- Constraint Satisfaction Problems: Prof. Abbas AL-BakriDocumento41 pagineConstraint Satisfaction Problems: Prof. Abbas AL-BakriIhab AmerNessuna valutazione finora
- Lec 5Documento51 pagineLec 5Vân AnhNessuna valutazione finora
- AI-Lecture 7 (Constraint Satisfaction Problems)Documento60 pagineAI-Lecture 7 (Constraint Satisfaction Problems)Yna ForondaNessuna valutazione finora
- CspsDocumento33 pagineCspsArthy JNessuna valutazione finora
- Lec08 csp2Documento29 pagineLec08 csp2sowdaga mustafizur rahmanNessuna valutazione finora
- c6 ConstraintsDocumento42 paginec6 ConstraintsSamir SabryNessuna valutazione finora
- Problemas de Satisfacción de RestriccionesDocumento40 pagineProblemas de Satisfacción de RestriccionesCamilo IsazaNessuna valutazione finora
- Backtracking Search For CSPS: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocumento24 pagineBacktracking Search For CSPS: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINessuna valutazione finora
- Constraint Satisfaction Problems: Section 1 - 3Documento34 pagineConstraint Satisfaction Problems: Section 1 - 3expocoinsNessuna valutazione finora
- Lecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of TehranDocumento47 pagineLecture 5: Constraint Satisfaction Problem (CSP) : Heshaam Faili Hfaili@ut - Ac.ir University of Tehrantrilok4391Nessuna valutazione finora
- Constraint Satisfaction ProblemsDocumento40 pagineConstraint Satisfaction Problemsapi-19801502Nessuna valutazione finora
- 11 - CSPDocumento40 pagine11 - CSPSupriya NevewaniNessuna valutazione finora
- CSPDocumento45 pagineCSPnicholasfrancisNessuna valutazione finora
- Constraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerDocumento17 pagineConstraint Satisfaction Problems: Artificial Intelligence COSC-3112 Ms. Humaira AnwerMUHAMMAD ALINessuna valutazione finora
- (Part 1) CSPDocumento16 pagine(Part 1) CSPAhmed KhaledNessuna valutazione finora
- Constraint Satisfaction ProblemsDocumento21 pagineConstraint Satisfaction ProblemsZoyes ShavanaNessuna valutazione finora
- CSE 473: Artificial Intelligence: Backtracking SearchDocumento17 pagineCSE 473: Artificial Intelligence: Backtracking Searchsimionesei.loredanaNessuna valutazione finora
- CS 188 Introduction To Artificial Intelligence Spring 2019 Note 5Documento10 pagineCS 188 Introduction To Artificial Intelligence Spring 2019 Note 5hellosunshine95Nessuna valutazione finora
- Sp14 Cs188 Lecture 5 - Csps IIDocumento38 pagineSp14 Cs188 Lecture 5 - Csps IIimoptra143Nessuna valutazione finora
- Cs188-Sp23-Lec07 CSPDocumento37 pagineCs188-Sp23-Lec07 CSPkhanhlinhkstndtvtk57Nessuna valutazione finora
- cs188 Fa22 Lec03Documento36 paginecs188 Fa22 Lec03Yasmine Amina MoudjarNessuna valutazione finora
- Constraint Satisfaction ProblemDocumento9 pagineConstraint Satisfaction ProblemswapsjagNessuna valutazione finora
- Constraint Satisfaction ProblemDocumento3 pagineConstraint Satisfaction ProblemSushmita MhamaneNessuna valutazione finora
- Trí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsDocumento33 pagineTrí tuệ nhân tạo (Artificial Intelligence) : Constraint Satisfaction ProblemsVăn Lâm TrầnNessuna valutazione finora
- Constraint Satisfaction ProblemsDocumento49 pagineConstraint Satisfaction ProblemsPoonam KumariNessuna valutazione finora
- Constraint Satisfaction ProblemDocumento10 pagineConstraint Satisfaction ProblemSwapniltrinityNessuna valutazione finora
- Lecture8 2015Documento51 pagineLecture8 2015hu jackNessuna valutazione finora
- K Nearest Neighbor ClassificationDocumento32 pagineK Nearest Neighbor ClassificationRanjan0% (1)
- Constraint Satisfaction Problems: Basic AlgorithmsDocumento57 pagineConstraint Satisfaction Problems: Basic Algorithmssimionesei.loredanaNessuna valutazione finora
- Lecture5 Data CompressionDocumento20 pagineLecture5 Data CompressionAbdo ANNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Spring 2010 - CS604 - 1 - SolutionDocumento2 pagineSpring 2010 - CS604 - 1 - SolutionPower GirlsNessuna valutazione finora
- Summative Reflection CommDocumento5 pagineSummative Reflection Commapi-546460750Nessuna valutazione finora
- Guided-Discovery Learning Strategy and Senior School Students Performance in Mathematics in Ejigbo, NigeriaDocumento9 pagineGuided-Discovery Learning Strategy and Senior School Students Performance in Mathematics in Ejigbo, NigeriaAlexander DeckerNessuna valutazione finora
- Iec Codes PDFDocumento257 pagineIec Codes PDFAkhil AnumandlaNessuna valutazione finora
- What You Need To Know About Your Drive TestDocumento12 pagineWhat You Need To Know About Your Drive TestMorley MuseNessuna valutazione finora
- Low Voltage Switchgear Specification: 1. ScopeDocumento6 pagineLow Voltage Switchgear Specification: 1. ScopejendrikoNessuna valutazione finora
- Zimbabwe - Medical - CPIN - v2.0 - GOV - UKDocumento39 pagineZimbabwe - Medical - CPIN - v2.0 - GOV - UKsammy redganjiNessuna valutazione finora
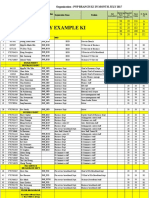
- PNP Ki in July-2017 AdminDocumento21 paginePNP Ki in July-2017 AdminSina NeouNessuna valutazione finora
- 1 PBDocumento7 pagine1 PBIndah Purnama TaraNessuna valutazione finora
- Tài Liệu Hướng Dẫn Cài Đặt Rơ Le MPS 3000Documento55 pagineTài Liệu Hướng Dẫn Cài Đặt Rơ Le MPS 3000nguyenquangtonNessuna valutazione finora
- Vocabulary FceDocumento17 pagineVocabulary Fceivaan94Nessuna valutazione finora
- Multimedia System DesignDocumento95 pagineMultimedia System DesignRishi Aeri100% (1)
- Spectacle Blinds - Closed Blinds Open Blinds (Ring Spacer)Documento2 pagineSpectacle Blinds - Closed Blinds Open Blinds (Ring Spacer)Widiyanto WiwidNessuna valutazione finora
- The Body Shop Case Analysis. The Challenges of Managing Business As Holistic ConfigurationDocumento28 pagineThe Body Shop Case Analysis. The Challenges of Managing Business As Holistic ConfigurationHanna AbejoNessuna valutazione finora
- Boarding House Preferences by Middle Up Class Students in SurabayaDocumento8 pagineBoarding House Preferences by Middle Up Class Students in Surabayaeditor ijeratNessuna valutazione finora
- Nfpa 1126 PDFDocumento24 pagineNfpa 1126 PDFL LNessuna valutazione finora
- [18476228 - Organization, Technology and Management in Construction_ an International Journal] Adaptive Reuse_ an Innovative Approach for Generating Sustainable Values for Historic Buildings in Developing CountriesDocumento15 pagine[18476228 - Organization, Technology and Management in Construction_ an International Journal] Adaptive Reuse_ an Innovative Approach for Generating Sustainable Values for Historic Buildings in Developing Countrieslohithsarath bethalaNessuna valutazione finora
- SICHEM Brochure 2023Documento8 pagineSICHEM Brochure 2023krishnarao badisaNessuna valutazione finora
- Sheltered 2 Item Recycle ListDocumento5 pagineSheltered 2 Item Recycle ListRachel GNessuna valutazione finora
- ET4254 Communications and Networking 1 - Tutorial Sheet 3 Short QuestionsDocumento5 pagineET4254 Communications and Networking 1 - Tutorial Sheet 3 Short QuestionsMichael LeungNessuna valutazione finora
- EP001 LifeCoachSchoolTranscriptDocumento13 pagineEP001 LifeCoachSchoolTranscriptVan GuedesNessuna valutazione finora
- Project ProposalDocumento4 pagineProject Proposaljiaclaire2998100% (1)
- Paper 1 AnalysisDocumento2 paginePaper 1 AnalysisNamanNessuna valutazione finora
- Benedict Anderson, Imagined CommunitiesDocumento2 pagineBenedict Anderson, Imagined CommunitiesMonir Amine0% (1)
- Artificial Intelligence Practical 1Documento5 pagineArtificial Intelligence Practical 1sadani1989Nessuna valutazione finora
- MDI - Good Fellas - ScriptDocumento20 pagineMDI - Good Fellas - ScriptRahulSamaddarNessuna valutazione finora
- Bioinformatics Computing II: MotivationDocumento7 pagineBioinformatics Computing II: MotivationTasmia SaleemNessuna valutazione finora
- Getting Started With Citrix NetScalerDocumento252 pagineGetting Started With Citrix NetScalersudharaghavanNessuna valutazione finora
- Operator'S Manual Diesel Engine: 2L41C - 2M41 - 2M41ZDocumento110 pagineOperator'S Manual Diesel Engine: 2L41C - 2M41 - 2M41ZMauricio OlayaNessuna valutazione finora
- Vygotsky EssayDocumento3 pagineVygotsky Essayapi-526165635Nessuna valutazione finora











































































![[18476228 - Organization, Technology and Management in Construction_ an International Journal] Adaptive Reuse_ an Innovative Approach for Generating Sustainable Values for Historic Buildings in Developing Countries](https://imgv2-2-f.scribdassets.com/img/document/422064728/149x198/344a5742a7/1565947342?v=1)












