Potrebbero piacerti anche
- Lecture 12 Reduction of Multiple SubsystemsDocumento28 pagineLecture 12 Reduction of Multiple SubsystemsHamza KhanNessuna valutazione finora
- Lecture 20 Root Locus Introduction and DefinitionDocumento21 pagineLecture 20 Root Locus Introduction and DefinitionHamza KhanNessuna valutazione finora
- EEG Based Brain Source Localization Comparison of sLORETA and eLORETADocumento10 pagineEEG Based Brain Source Localization Comparison of sLORETA and eLORETAHamza KhanNessuna valutazione finora
- Lecture 18 Static Error Constants and System TypeDocumento21 pagineLecture 18 Static Error Constants and System TypeHamza KhanNessuna valutazione finora
- Lecture 19 Steady-State Error For Nonunity Feedback SystemsDocumento19 pagineLecture 19 Steady-State Error For Nonunity Feedback SystemsHamza KhanNessuna valutazione finora
- Lecture 13 Signal Flow Graphs and Mason, S RuleDocumento27 pagineLecture 13 Signal Flow Graphs and Mason, S RuleHamza KhanNessuna valutazione finora
- Lecture 16, 17 Steady-State Error For Unity Feedback SystemDocumento29 pagineLecture 16, 17 Steady-State Error For Unity Feedback SystemHamza KhanNessuna valutazione finora
- 12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsDocumento30 pagine12-Lecture 07 Pole, Zeros and Time Response of First and 2nd Order SystemsHamza KhanNessuna valutazione finora
- Lecture 14, 15 StabilityDocumento45 pagineLecture 14, 15 StabilityHamza KhanNessuna valutazione finora
- 14-Lecture 10, 11 Systems Response With Additional Poles and ZeroesDocumento36 pagine14-Lecture 10, 11 Systems Response With Additional Poles and ZeroesHamza KhanNessuna valutazione finora
- 8-Lecture 39 TF To SS and SS To TF ConversionDocumento18 pagine8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanNessuna valutazione finora
- Lecture 14 StabilityDocumento26 pagineLecture 14 StabilityHamza KhanNessuna valutazione finora
- 3-Lecture 03 Translational Mechanical System3-SDocumento23 pagine3-Lecture 03 Translational Mechanical System3-SHamza KhanNessuna valutazione finora
- 10-Lecture 41, 42 Pole PlacementDocumento18 pagine10-Lecture 41, 42 Pole PlacementHamza KhanNessuna valutazione finora
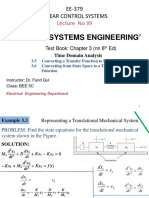
- 6-Lecture 37 Time Domain AnalysisDocumento17 pagine6-Lecture 37 Time Domain AnalysisHamza KhanNessuna valutazione finora
- 7-Lecture 38 State Space RepresentationDocumento16 pagine7-Lecture 38 State Space RepresentationHamza KhanNessuna valutazione finora
- 1-Lecture 01 IntroductionDocumento29 pagine1-Lecture 01 IntroductionHamza KhanNessuna valutazione finora
- 5-Lecture 05 Electromechanical Systems Transfer FunctionsDocumento13 pagine5-Lecture 05 Electromechanical Systems Transfer FunctionsHamza Khan100% (1)
- 2-Lecture 02 Electrical Networks Transfer FunctionDocumento18 pagine2-Lecture 02 Electrical Networks Transfer FunctionHamza KhanNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Beautiful SpotsDocumento2 pagineBeautiful SpotsLouise Yongco100% (1)
- List of HTML TagsDocumento5 pagineList of HTML TagsdorinadidNessuna valutazione finora
- IPS PressVest Premium PDFDocumento62 pagineIPS PressVest Premium PDFLucian Catalin CalinNessuna valutazione finora
- SahanaDocumento1 paginaSahanamurthyarun1993Nessuna valutazione finora
- Check e Bae PDFDocumento28 pagineCheck e Bae PDFjogoram219Nessuna valutazione finora
- ATS2017 ProspectusDocumento13 pagineATS2017 ProspectusGiri WakshanNessuna valutazione finora
- What Is A Fired Heater in A RefineryDocumento53 pagineWhat Is A Fired Heater in A RefineryCelestine OzokechiNessuna valutazione finora
- Using Visual Rating To Diagnose DementiaDocumento10 pagineUsing Visual Rating To Diagnose DementiaImágenes Rosendo GarcíaNessuna valutazione finora
- Needle BasicsDocumento31 pagineNeedle BasicsARYAN RATHORENessuna valutazione finora
- Controlador DanfossDocumento2 pagineControlador Danfossfrank.marcondes2416Nessuna valutazione finora
- A Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemsDocumento10 pagineA Brief Tutorial On Interval Type-2 Fuzzy Sets and SystemstarekeeeNessuna valutazione finora
- Dance Terms Common To Philippine Folk DancesDocumento7 pagineDance Terms Common To Philippine Folk DancesSaeym SegoviaNessuna valutazione finora
- Aspek Perpajakan Dalam Transfer Pricing: Related PapersDocumento15 pagineAspek Perpajakan Dalam Transfer Pricing: Related PapersHasrawati AzisNessuna valutazione finora
- Interbond 2340UPC: Universal Pipe CoatingDocumento4 pagineInterbond 2340UPC: Universal Pipe Coatingnoto.sugiartoNessuna valutazione finora
- RESEARCH 10 Module 1 Lesson 1 (WEEK 1-2)Documento5 pagineRESEARCH 10 Module 1 Lesson 1 (WEEK 1-2)DennisNessuna valutazione finora
- Plant Report Template Class 81Documento2 paginePlant Report Template Class 81Kamran KhanNessuna valutazione finora
- MN Rules Chapter 5208 DLIDocumento24 pagineMN Rules Chapter 5208 DLIMichael DoyleNessuna valutazione finora
- Angelo (Patrick) Complaint PDFDocumento2 pagineAngelo (Patrick) Complaint PDFPatLohmannNessuna valutazione finora
- Ankle Injury EvaluationDocumento7 pagineAnkle Injury EvaluationManiDeep ReddyNessuna valutazione finora
- BA 4722 Marketing Strategy SyllabusDocumento6 pagineBA 4722 Marketing Strategy SyllabusSri GunawanNessuna valutazione finora
- 1st Problem Solving Assignment - Barrels of Apples - M383 Sp22.docx-2Documento4 pagine1st Problem Solving Assignment - Barrels of Apples - M383 Sp22.docx-2Kor16Nessuna valutazione finora
- Lecture 12 Health Management Information SystemDocumento14 pagineLecture 12 Health Management Information SystemKamran SheikhNessuna valutazione finora
- HPCL CSR Social Audit ReportDocumento56 pagineHPCL CSR Social Audit Reportllr_ka_happaNessuna valutazione finora
- Thesis On Retail Management of The Brand 'Sleepwell'Documento62 pagineThesis On Retail Management of The Brand 'Sleepwell'Sajid Lodha100% (1)
- 02 Chapter 2 - Corporate Governance MechanismDocumento19 pagine02 Chapter 2 - Corporate Governance MechanismHanis ZahiraNessuna valutazione finora
- BluePrint & High Pressure Pascalization (HPP)Documento3 pagineBluePrint & High Pressure Pascalization (HPP)Prof C.S.PurushothamanNessuna valutazione finora
- Module 2Documento7 pagineModule 2karthik karti100% (1)
- Economizer DesignDocumento2 pagineEconomizer Designandremalta09100% (4)
- Chapter 24 - The Solar SystemDocumento36 pagineChapter 24 - The Solar SystemHeather Blackwell100% (1)
- Physico-Chemical Properties of Nutmeg (Myristica Fragrans Houtt) of North Sulawesi NutmegDocumento9 paginePhysico-Chemical Properties of Nutmeg (Myristica Fragrans Houtt) of North Sulawesi NutmegZyuha AiniiNessuna valutazione finora