Potrebbero piacerti anche
- Red Hopfield 38Documento10 pagineRed Hopfield 38DarkSideeNessuna valutazione finora
- Presentacion - Algoritmos Geneticos PDFDocumento37 paginePresentacion - Algoritmos Geneticos PDFAgustin GarciaNessuna valutazione finora
- Sílabo Especialización Analítica en Ciencia de Datos Con Python - NDocumento26 pagineSílabo Especialización Analítica en Ciencia de Datos Con Python - Njorge emerson cuellar javierNessuna valutazione finora
- Solución Del Problema Del Viajero Comerciante TSP UsandoDocumento30 pagineSolución Del Problema Del Viajero Comerciante TSP UsandoStephanie M Barreda Sotomayor0% (1)
- Analisis de Sistemas de ComputoDocumento3 pagineAnalisis de Sistemas de ComputoManuelito UiNessuna valutazione finora
- Predicción Demanda Eléctrica Española. Implementación de Redes Neuronales Recurrentes en Python PDFDocumento52 paginePredicción Demanda Eléctrica Española. Implementación de Redes Neuronales Recurrentes en Python PDFVictor Hugo Yugcha QuinatoaNessuna valutazione finora
- Qué Es La NubeDocumento15 pagineQué Es La NubeAndres_flores12Nessuna valutazione finora
- Sistema Informático de SeguridadDocumento150 pagineSistema Informático de SeguridadFred Sem100% (1)
- 03 - Aplicaciones de Deep Learning Usando RDocumento25 pagine03 - Aplicaciones de Deep Learning Usando RJose Maria Marquez BlancoNessuna valutazione finora
- Informacio N Inteligencia Artificial 2021 Ii 01Documento9 pagineInformacio N Inteligencia Artificial 2021 Ii 01PatricioNessuna valutazione finora
- Proyecto Tecnologia MovilDocumento16 pagineProyecto Tecnologia Movildegblack100% (1)
- Parcial Redes Reuronales 2021-2Documento7 pagineParcial Redes Reuronales 2021-2ISABELLA SUSANA CABALLERO MORENONessuna valutazione finora
- Algoritmos de GrafosDocumento7 pagineAlgoritmos de GrafosRufis LimónNessuna valutazione finora
- Ordenadores CuánticosDocumento15 pagineOrdenadores CuánticosBerta Díaz0% (1)
- Temario Curso HackDocumento25 pagineTemario Curso Hackluk1323100% (1)
- PRESENTACIÓN Introducción Al Lenguaje EnsambladorDocumento36 paginePRESENTACIÓN Introducción Al Lenguaje EnsambladorRaciel VillagranaNessuna valutazione finora
- Separata01 ML Uni FimDocumento58 pagineSeparata01 ML Uni FimLUIS ISIDRO HUARCAYA TORRESNessuna valutazione finora
- Computación en La NubeDocumento11 pagineComputación en La NubeeduardoNessuna valutazione finora
- PROGRAMACIÓN CON MPI y OPENMP Cluster - OdpDocumento270 paginePROGRAMACIÓN CON MPI y OPENMP Cluster - OdpkastoloNessuna valutazione finora
- Sistema Informatico de Tramite Documentario de Registro CivilDocumento52 pagineSistema Informatico de Tramite Documentario de Registro CivilDani Meza Cardama100% (1)
- Guia de Arquitectura de Computadoras IIDocumento31 pagineGuia de Arquitectura de Computadoras IIManuel CastilloNessuna valutazione finora
- PWM - (Modulación Por Ancho de Pulso)Documento8 paginePWM - (Modulación Por Ancho de Pulso)Anonymous eoHkkVmoINNessuna valutazione finora
- Redes neuronales examen subsanaciónDocumento2 pagineRedes neuronales examen subsanaciónFranco PonceNessuna valutazione finora
- Seminario de Tesis PDFDocumento51 pagineSeminario de Tesis PDFFabian Enrique Yovera GonzálesNessuna valutazione finora
- General SparcDocumento8 pagineGeneral SparcRoberto Madrigal AlvarezNessuna valutazione finora
- RRN en C++Documento11 pagineRRN en C++Emmanuel BeltranNessuna valutazione finora
- Redes NeuronalesDocumento8 pagineRedes NeuronalesAuditaNessuna valutazione finora
- MATRIZ DE CONSISTENCIA 2020 OkDocumento2 pagineMATRIZ DE CONSISTENCIA 2020 OkrogerNessuna valutazione finora
- Procesador IA-32 - Modo ProtegidoDocumento199 pagineProcesador IA-32 - Modo ProtegidoYer Ko100% (1)
- Map ReduceDocumento24 pagineMap ReduceEdsabethNessuna valutazione finora
- Manual Simulacion H. Caselli GDocumento77 pagineManual Simulacion H. Caselli GGerald Paul Gutiérrez SantosNessuna valutazione finora
- Agentes ModiDocumento11 pagineAgentes ModiMusic AnimeNessuna valutazione finora
- Laboratior de HilosDocumento12 pagineLaboratior de HilosJordanCestNessuna valutazione finora
- Tema2B-Subredes SuperredesDocumento61 pagineTema2B-Subredes SuperredesLiam Sarmiento CarrascoNessuna valutazione finora
- Administración procesador multiprocesamientoDocumento20 pagineAdministración procesador multiprocesamientoHebert Jonathan Vilca MamaniNessuna valutazione finora
- Concepto Bit, ByteDocumento20 pagineConcepto Bit, BytePaola dell androNessuna valutazione finora
- Ejemplo SADDocumento18 pagineEjemplo SADEdwin PalaciosNessuna valutazione finora
- Especificación Formal de Requerimientos para Un Sistema de Seguridad de Visibilidad Limitada en Un Cajero Automático VDM++Documento6 pagineEspecificación Formal de Requerimientos para Un Sistema de Seguridad de Visibilidad Limitada en Un Cajero Automático VDM++RedaayJimenezNessuna valutazione finora
- Computadoras Moleculares y OtrasDocumento8 pagineComputadoras Moleculares y OtrasEduardo Espinoza Llontop100% (1)
- 1.3.1.3 Lab - Researching Converged Network ServicesDocumento3 pagine1.3.1.3 Lab - Researching Converged Network ServicesRenzo LoaizaNessuna valutazione finora
- Examen ParcialDocumento4 pagineExamen ParcialJose ChinoNessuna valutazione finora
- Tema 3. Arquitectura Dispositivos MovilesDocumento11 pagineTema 3. Arquitectura Dispositivos MovilesIngrid OrdazNessuna valutazione finora
- Mod03INF513 PresentacionDocumento184 pagineMod03INF513 PresentacionEric PattersonNessuna valutazione finora
- Red Hopfield y HammingDocumento18 pagineRed Hopfield y HammingAndrés Enrique Carrillo CastilloNessuna valutazione finora
- Programacion Con OpenMP PDFDocumento47 pagineProgramacion Con OpenMP PDFBriceida Chambilla MamaniNessuna valutazione finora
- Practica Calificada I SolucionDocumento4 paginePractica Calificada I SolucionErick JhoanNessuna valutazione finora
- Funcionamiento Del MicroprocesadorDocumento2 pagineFuncionamiento Del Microprocesadorrpomboza81Nessuna valutazione finora
- Trabajo Sistema ExpertoDocumento10 pagineTrabajo Sistema ExpertoPrograma Ingeniería de Sistemas100% (1)
- Arquitectura RISC y CISCDocumento12 pagineArquitectura RISC y CISCdarmagdarmagNessuna valutazione finora
- Paper Seguridad ADocumento2 paginePaper Seguridad AassesinoNessuna valutazione finora
- Reporte de Practicas de SQLDocumento16 pagineReporte de Practicas de SQLIvan Herrera100% (1)
- Redes Neuronales-Red de KohonenDocumento41 pagineRedes Neuronales-Red de KohonenAxel 76Nessuna valutazione finora
- Ejercicios Secuenciales - EpsDocumento1 paginaEjercicios Secuenciales - EpsJesus VuelvasNessuna valutazione finora
- Programación orientada a objetos en Java - Examen prácticoDocumento1 paginaProgramación orientada a objetos en Java - Examen prácticoLLUIS ANTONIO QUISPE FLORESNessuna valutazione finora
- Diagrama Intranet EDI CodigodeBarraDocumento28 pagineDiagrama Intranet EDI CodigodeBarramaivelynNessuna valutazione finora
- RoboCupJunior Rescue LineDocumento20 pagineRoboCupJunior Rescue LineJuan BravoNessuna valutazione finora
- Resumen - Capitulo 6Documento7 pagineResumen - Capitulo 6Øsïírïís RøjåsNessuna valutazione finora
- Red Neuronal Modelo de HopfieldDocumento16 pagineRed Neuronal Modelo de HopfieldRAY REYES COLINANessuna valutazione finora
- Red Hopfield (Editado)Documento18 pagineRed Hopfield (Editado)sonia marcela duqueNessuna valutazione finora
- La Ratita PresumidaDocumento1 paginaLa Ratita PresumidaJaneth GPNessuna valutazione finora
- TEMA1Documento48 pagineTEMA1Janeth GPNessuna valutazione finora
- Presentación 1Documento8 paginePresentación 1Janeth GPNessuna valutazione finora
- Clase MarthaDocumento1 paginaClase MarthaJaneth GPNessuna valutazione finora
- ARN 17480975 EnsayoDocumento22 pagineARN 17480975 EnsayoJaneth GPNessuna valutazione finora
- Docshare - Tips - Receta Imss Editable PDFDocumento1 paginaDocshare - Tips - Receta Imss Editable PDFJanett De GutierrzNessuna valutazione finora
- Ejemplos de Empresas Por Órdenes y ProcesosDocumento1 paginaEjemplos de Empresas Por Órdenes y ProcesosJaneth GPNessuna valutazione finora
- Migración de Una Base de DatosDocumento14 pagineMigración de Una Base de DatosJaneth GPNessuna valutazione finora
- Intranet!Documento15 pagineIntranet!Janeth GPNessuna valutazione finora
- 6 sistemasEDOsDocumento55 pagine6 sistemasEDOsMabel RojasNessuna valutazione finora
- 6 sistemasEDOsDocumento55 pagine6 sistemasEDOsMabel RojasNessuna valutazione finora
- Programacion HibridaDocumento5 pagineProgramacion HibridaJaneth GPNessuna valutazione finora
- Auditori ADocumento21 pagineAuditori AJaneth GPNessuna valutazione finora
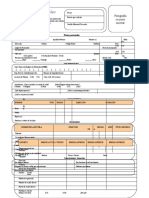
- Formato Solicitud EmpleoDocumento2 pagineFormato Solicitud EmpleoHugo Gonzalez100% (1)
- Topología ATM y sus característicasDocumento20 pagineTopología ATM y sus característicasJaneth GPNessuna valutazione finora
- SintesisDocumento3 pagineSintesisJaneth GPNessuna valutazione finora
- Fundamentos Ing SW Unidad 1 (Sintesis)Documento6 pagineFundamentos Ing SW Unidad 1 (Sintesis)Janeth GPNessuna valutazione finora
- Instalaciones eléctricas: puesta a tierra y medidas de seguridadDocumento26 pagineInstalaciones eléctricas: puesta a tierra y medidas de seguridadVictor Quispe CarranzaNessuna valutazione finora
- 2019 Elvin GranjaDocumento127 pagine2019 Elvin GranjaErnestoNessuna valutazione finora
- HDocumento2 pagineHJhonatan Flores JoaquinNessuna valutazione finora
- Guía SPSS Sesión 1Documento49 pagineGuía SPSS Sesión 1David PerezNessuna valutazione finora
- Ficha Tecnica Adoquin Diamante 15 X 15 X 8Documento1 paginaFicha Tecnica Adoquin Diamante 15 X 15 X 8Paco Casillas AstorgaNessuna valutazione finora
- Aforo de CaudalesDocumento7 pagineAforo de CaudalesDaniel PernaNessuna valutazione finora
- Analicen Las Fuentes de Poder A Disposición de Caruso para Dirigir A Los DecoradoresDocumento3 pagineAnalicen Las Fuentes de Poder A Disposición de Caruso para Dirigir A Los DecoradoresMagnolia CarreñoNessuna valutazione finora
- Proyecto de Inversion - PreinversionDocumento1 paginaProyecto de Inversion - PreinversionVíctor Fuentes FernándezNessuna valutazione finora
- Memoria Calculo Piping Gasco 2017Documento6 pagineMemoria Calculo Piping Gasco 2017German Alexis VillaNessuna valutazione finora
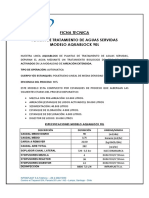
- Ficha Tecnica Aqb 90l EstandarDocumento2 pagineFicha Tecnica Aqb 90l EstandaringearroyoNessuna valutazione finora
- La Importancia de La Geotecnia en El Diseño VialDocumento25 pagineLa Importancia de La Geotecnia en El Diseño VialarbdelosoNessuna valutazione finora
- Claves Nod32Documento3 pagineClaves Nod32jesusNessuna valutazione finora
- 08 - Diseño de Redes PDFDocumento40 pagine08 - Diseño de Redes PDFKevin Castro QuispeNessuna valutazione finora
- Ventilación Minería SubterraneaDocumento42 pagineVentilación Minería SubterraneaStichLeivaOlea100% (1)
- Resumen de explosivos para ingeniería civilDocumento7 pagineResumen de explosivos para ingeniería civilFabricio LeonNessuna valutazione finora
- Sistemas Digitales y Circuitos LógicosDocumento78 pagineSistemas Digitales y Circuitos LógicosJefferson JaraNessuna valutazione finora
- Produccion de CiclohexanoDocumento17 pagineProduccion de CiclohexanoCatalinaManjarresNessuna valutazione finora
- Adaptador Opcional Procesador M! MomentumDocumento392 pagineAdaptador Opcional Procesador M! MomentumJhilmar Apaza CarrilloNessuna valutazione finora
- Solucionario Examen 3 PLC1Documento6 pagineSolucionario Examen 3 PLC1Raul Paricahua NinasivinchaNessuna valutazione finora
- Listones de Madera Vertical 04052023Documento1 paginaListones de Madera Vertical 04052023marioNessuna valutazione finora
- Desarenador FinalDocumento40 pagineDesarenador Finalrogersaca100% (1)
- Computación Gráfica 2D y 3DDocumento2 pagineComputación Gráfica 2D y 3DAndrés GóngoraNessuna valutazione finora
- M4Ns/ M4Ys: Medidor Digital Con Preescalas Alimentado Por Lazo DIN W48 H24mm, W72 H36mm CaracterísticasDocumento4 pagineM4Ns/ M4Ys: Medidor Digital Con Preescalas Alimentado Por Lazo DIN W48 H24mm, W72 H36mm CaracterísticasMICHAEL ANDRES HERNANDEZ ORTIZNessuna valutazione finora
- Plan de Remediación de Suelos SMCVDocumento7 paginePlan de Remediación de Suelos SMCVJORGE LUIS BENAVENTE MUÑOZNessuna valutazione finora
- Atenuadores Terminal AireDocumento15 pagineAtenuadores Terminal AireRo Saul CohenNessuna valutazione finora
- Procedimiento para Retiro de Lodos Lavado E Impermeabilizacion en Estructuras de Los Sistemas de Aguas Industriales Planta Cenit - RetiroDocumento11 pagineProcedimiento para Retiro de Lodos Lavado E Impermeabilizacion en Estructuras de Los Sistemas de Aguas Industriales Planta Cenit - RetiroYeison MartínezNessuna valutazione finora
- Resumen ColiseoDocumento14 pagineResumen ColiseoEdwin Pedro Lucas RamosNessuna valutazione finora
- ISCO Catalog vm2022 - 3Documento1 paginaISCO Catalog vm2022 - 3nestorNessuna valutazione finora
- Presupuesto Polacris N 1073 Sre. Empresas OchhoDocumento1 paginaPresupuesto Polacris N 1073 Sre. Empresas OchhomarcoNessuna valutazione finora