Potrebbero piacerti anche
- Robot Industrial Pesado y Manufactura PDFDocumento5 pagineRobot Industrial Pesado y Manufactura PDFAndres BatistaNessuna valutazione finora
- Brazo robot 6 grados libertad control LabView AndroidDocumento23 pagineBrazo robot 6 grados libertad control LabView AndroidRodrigoTorresMauresNessuna valutazione finora
- RoboticaDocumento91 pagineRoboticaMThe StrokesNessuna valutazione finora
- Reloj DigitalDocumento15 pagineReloj DigitalGomer Guevara TitoNessuna valutazione finora
- Carro Arduino detección obstáculosDocumento6 pagineCarro Arduino detección obstáculosRichardPcNessuna valutazione finora
- Robot cartesiano TESEDocumento28 pagineRobot cartesiano TESEAntonio MartinezNessuna valutazione finora
- Araña RobotDocumento7 pagineAraña RobotJorge TorresNessuna valutazione finora
- Control PIDDocumento4 pagineControl PIDIvan PelcastreNessuna valutazione finora
- Tema 1Documento7 pagineTema 1acamargowNessuna valutazione finora
- Robots SerialesDocumento21 pagineRobots SerialesJuan GuzmanNessuna valutazione finora
- INFORME IEEE de Semaforo Vehicular y Peatonal Con PIC 16F877ADocumento3 pagineINFORME IEEE de Semaforo Vehicular y Peatonal Con PIC 16F877ASanti HernandezNessuna valutazione finora
- Describa Las Principales Características de Los Buses de CampoDocumento15 pagineDescriba Las Principales Características de Los Buses de CampoAndres MedinaNessuna valutazione finora
- Introducción a la interacción humano-computadora y sus principios claveDocumento20 pagineIntroducción a la interacción humano-computadora y sus principios claveRicardoChairezOlascoaga50% (2)
- Diseño e Implementación de Un Controlador Pid Análogo para Un Motor UniversalDocumento7 pagineDiseño e Implementación de Un Controlador Pid Análogo para Un Motor Universalhhryc7Nessuna valutazione finora
- Diseño y Prototipo de Un Robot ExploradorDocumento11 pagineDiseño y Prototipo de Un Robot ExploradorFabian VillamarinNessuna valutazione finora
- Proyecto (Luz Intermitente) Con 555Documento5 pagineProyecto (Luz Intermitente) Con 555Yorve Hernandez100% (1)
- S01.s1 Material 1 PDFDocumento19 pagineS01.s1 Material 1 PDFalexNessuna valutazione finora
- Aplicación de La Robótica en La IndustriaDocumento16 pagineAplicación de La Robótica en La IndustriaMario CAlNessuna valutazione finora
- La Inteligencia Artificial Aplicada en La Robótica (Edgar Lozado)Documento5 pagineLa Inteligencia Artificial Aplicada en La Robótica (Edgar Lozado)EdgarFranciscoLozadoCampoverdeNessuna valutazione finora
- Informe ProyectoDocumento6 pagineInforme ProyectoJorge ZambranoNessuna valutazione finora
- Análisis de circuitos electrónicos digitales para su implementaciónDocumento17 pagineAnálisis de circuitos electrónicos digitales para su implementaciónAngie CortesNessuna valutazione finora
- Encoder de Velocidad Practica 2Documento8 pagineEncoder de Velocidad Practica 2Daniel Alejandro SandovalNessuna valutazione finora
- Tecnológico nacional de México: Instituto Tecnológico de Lerma Ingeniería Mecatrónica Materia: Robótica Unidad: 1 Morfología de un robotDocumento22 pagineTecnológico nacional de México: Instituto Tecnológico de Lerma Ingeniería Mecatrónica Materia: Robótica Unidad: 1 Morfología de un robotCeci Poot LugoNessuna valutazione finora
- Simulación ExamenDocumento2 pagineSimulación ExamenAlejandro Del Olmo NarajoNessuna valutazione finora
- Articulo IEEEDocumento6 pagineArticulo IEEEenzo_kcrs2787109Nessuna valutazione finora
- Construccion Ensamblaje y Control de Un Robot Scara de 3 Grados de LibertadDocumento170 pagineConstruccion Ensamblaje y Control de Un Robot Scara de 3 Grados de LibertadWilly HernandezNessuna valutazione finora
- Cruce de Semaforos Con ArduinoDocumento7 pagineCruce de Semaforos Con ArduinoSebastián RiañoNessuna valutazione finora
- Informe 1 PicDocumento14 pagineInforme 1 PicClintonSemanateNessuna valutazione finora
- Robotica I - Sesion 4 - Herramientas de Localización EspacialDocumento22 pagineRobotica I - Sesion 4 - Herramientas de Localización EspacialBrianmenNessuna valutazione finora
- Informe #1 - Compuertas y TinkercadDocumento7 pagineInforme #1 - Compuertas y TinkercadJOSE DAVID HENAO DELGADONessuna valutazione finora
- Sistemas de numeración en electrónica digitalDocumento12 pagineSistemas de numeración en electrónica digitalCarlos Enrique Infantes PeraltaNessuna valutazione finora
- Seguidor de LineasDocumento10 pagineSeguidor de LineasJonathan Fiscal MalagaNessuna valutazione finora
- Conexión TIA Portal y Factory I/ODocumento12 pagineConexión TIA Portal y Factory I/Oleonardo daniel torres acostaNessuna valutazione finora
- Banda Transportadora Grupo - 9Documento12 pagineBanda Transportadora Grupo - 9Javier Arevalo100% (1)
- Diseño e Implementacion Brazo RobotDocumento102 pagineDiseño e Implementacion Brazo RobotLHCP50% (2)
- Informe de MicrocontroladoresDocumento13 pagineInforme de MicrocontroladoresDavid Escola VinanNessuna valutazione finora
- Tutorial Robot 2WD Esquiva Objetos (Leantec Robotics&Electronics) .Documento5 pagineTutorial Robot 2WD Esquiva Objetos (Leantec Robotics&Electronics) .Œsâr Diaz VargasNessuna valutazione finora
- Cuestionario Instrumentacion Virtual VillalobosDocumento7 pagineCuestionario Instrumentacion Virtual VillalobosAlejandro VillalobosNessuna valutazione finora
- Microcontroladores PIC16F886Documento23 pagineMicrocontroladores PIC16F886Francisco Guadalupe Uc CanNessuna valutazione finora
- 0 Introduccion A La Automatizacion y ControlDocumento52 pagine0 Introduccion A La Automatizacion y ControlMayraAlejandraNizamaChavez100% (1)
- Evolución Histórica de La Automatización de Los Procesos IndustrialesDocumento2 pagineEvolución Histórica de La Automatización de Los Procesos IndustrialesAlvaro AliagaNessuna valutazione finora
- Presentación Semana 4.0 (Circuitos Combinacionales)Documento26 paginePresentación Semana 4.0 (Circuitos Combinacionales)Kady Gisselle GomézNessuna valutazione finora
- Cinematica Del RobotDocumento28 pagineCinematica Del Robotdrake JonasNessuna valutazione finora
- Control digital PID de banda transportadoraDocumento5 pagineControl digital PID de banda transportadoraCeandve Manceandve0% (1)
- Lab 01 CabreraDocumento15 pagineLab 01 CabreraLuis Valencia EscarcenaNessuna valutazione finora
- Sistemas Embebidos en La IndustriaDocumento12 pagineSistemas Embebidos en La IndustriaanderelelectronicNessuna valutazione finora
- Conversion de Analogico A DigitalDocumento10 pagineConversion de Analogico A DigitalKeylogger Hoax Recycler Bin100% (1)
- Practica1 AutoDocumento6 paginePractica1 AutoByronXGuillinMNessuna valutazione finora
- Manual de Seguridad Brazo RoboticoDocumento7 pagineManual de Seguridad Brazo RoboticoSabrina Benítez SegarraNessuna valutazione finora
- Barrera de Estacionamiento Con ArduinoDocumento9 pagineBarrera de Estacionamiento Con ArduinoJaponte2014100% (1)
- Laboratorio 6Documento5 pagineLaboratorio 6Pablo Omonte100% (1)
- Estructura de Un Robot IndustrialDocumento22 pagineEstructura de Un Robot IndustrialMiroslava GalvánNessuna valutazione finora
- Lenguajes de Descripción de Hardware (HDL)Documento34 pagineLenguajes de Descripción de Hardware (HDL)Arturo72Nessuna valutazione finora
- Evolución de Los Sistemas RobóticaDocumento10 pagineEvolución de Los Sistemas RobóticaMilagros VazquesNessuna valutazione finora
- Introduccion A La Robotica IndustrialDocumento9 pagineIntroduccion A La Robotica IndustrialGanimedes Estelar100% (1)
- Desarrollo de Un Sistema Experto para Un Brazo k680 SterenDocumento7 pagineDesarrollo de Un Sistema Experto para Un Brazo k680 SterenArturo Octavio Vazquez TorresNessuna valutazione finora
- Automatizacion y RoboticaDocumento3 pagineAutomatizacion y Roboticamaria alejandra mathieu burgosNessuna valutazione finora
- Robotica en La Industria y Regla de JacksonDocumento30 pagineRobotica en La Industria y Regla de JacksonlorenaNessuna valutazione finora
- E04. Ensayo-Flores Jimenez Bryan JaredDocumento8 pagineE04. Ensayo-Flores Jimenez Bryan JaredBryan FloresNessuna valutazione finora
- Evaluacion 1 Internet de Las CosasDocumento11 pagineEvaluacion 1 Internet de Las CosasWalter Bautista67% (6)
- Sist. Operativos en RedDocumento38 pagineSist. Operativos en RedMarvel Antonio Oviedo CasasNessuna valutazione finora
- Robótica IndustrialDocumento29 pagineRobótica IndustrialMarvel Antonio Oviedo CasasNessuna valutazione finora
- UnidadDocumento1 paginaUnidadMarvel Antonio Oviedo CasasNessuna valutazione finora
- Robótica Industrial FinalDocumento6 pagineRobótica Industrial FinalMarvel Antonio Oviedo CasasNessuna valutazione finora
- Programacion Anual 2017 3 AñosDocumento21 pagineProgramacion Anual 2017 3 AñosMarvel Antonio Oviedo Casas83% (18)
- OF y CMO del marco curricular chilenoDocumento3 pagineOF y CMO del marco curricular chilenoFrank Honores BarriosNessuna valutazione finora
- Actividad 1 Estadisticas JuGVDocumento9 pagineActividad 1 Estadisticas JuGVJuan Antonio Martin GutierrezNessuna valutazione finora
- Especificaciones Tecnicas - ElectricasDocumento2 pagineEspecificaciones Tecnicas - ElectricasAnthony EspinoNessuna valutazione finora
- 3,318,950Documento1 pagina3,318,950director.metropolitanosaNessuna valutazione finora
- Clasificación residuos manejo especialDocumento2 pagineClasificación residuos manejo especialVictorGarciaNessuna valutazione finora
- Modelado y simulacion de sistemas mecanicosDocumento2 pagineModelado y simulacion de sistemas mecanicosluisssiiiNessuna valutazione finora
- Caso Analisis - Proyecto Cadena de Ferreterias.Documento23 pagineCaso Analisis - Proyecto Cadena de Ferreterias.Anonymous nHyQHswk100% (1)
- Lista de precios de fletes marítimos y servicios de grúas desde Costa RicaDocumento6 pagineLista de precios de fletes marítimos y servicios de grúas desde Costa RicaaliNessuna valutazione finora
- ArchivoDocumento45 pagineArchivoCarlos Gerardo MarínNessuna valutazione finora
- Administración tiempoDocumento7 pagineAdministración tiempoNay Nayzsa Martinez PachecoNessuna valutazione finora
- Indeterminacion EstaticaDocumento5 pagineIndeterminacion EstaticaHaroldVillanuevaTeran67% (3)
- Pettenati: Líder textil en Centroamérica con énfasis en sustentabilidadDocumento2 paginePettenati: Líder textil en Centroamérica con énfasis en sustentabilidadSofia PalmaNessuna valutazione finora
- Filosofos de La CalidadDocumento7 pagineFilosofos de La CalidadBecker96100% (1)
- Edel Navarro, R. - Las Nuevas Tecnologías para El Aprendizaje - Estado Del ArteDocumento20 pagineEdel Navarro, R. - Las Nuevas Tecnologías para El Aprendizaje - Estado Del ArteEdmundo Paredes DíazNessuna valutazione finora
- Cuantización y Codificación de Una SeñalDocumento4 pagineCuantización y Codificación de Una SeñalWilson PalomoNessuna valutazione finora
- DC - Di 12 MTDocumento101 pagineDC - Di 12 MTCristian Sepulveda100% (2)
- Tratamiento de Aguas Residuales Domesticas Mediante Humedales Artificiales Con La Especie Cyperus AlternifoliusDocumento2 pagineTratamiento de Aguas Residuales Domesticas Mediante Humedales Artificiales Con La Especie Cyperus AlternifoliusELMERNessuna valutazione finora
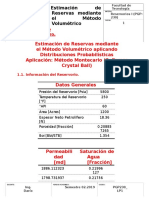
- Estimación de reservas mediante el método volumétricoDocumento3 pagineEstimación de reservas mediante el método volumétricofernando4talaveraNessuna valutazione finora
- 108S10 Amanco Desarrollo El Scorecard de SustentabilidadDocumento26 pagine108S10 Amanco Desarrollo El Scorecard de SustentabilidadRikardo Medina0% (1)
- Introduccion A LinuxDocumento34 pagineIntroduccion A LinuxLiubert ZambranoNessuna valutazione finora
- Laboratorio 5Documento22 pagineLaboratorio 5Angie Shesira Castro AlvarezNessuna valutazione finora
- Fundamentos Del Diseño Grafico - CristalabDocumento7 pagineFundamentos Del Diseño Grafico - CristalabArturo V. ArellánNessuna valutazione finora
- Proyecto Las VegasDocumento32 pagineProyecto Las VegasVargas LorehannaNessuna valutazione finora
- JunaebDocumento118 pagineJunaebAndrés Araneda VásquezNessuna valutazione finora
- ElcosDocumento4 pagineElcosPablo Gaspar D'Agostini AmengualNessuna valutazione finora
- Arquitectura Tardia de F.L. WRIGHT PDFDocumento28 pagineArquitectura Tardia de F.L. WRIGHT PDFfederico7davide7carnNessuna valutazione finora
- Voz Sobre IPDocumento79 pagineVoz Sobre IPENKELLYGRAGONNessuna valutazione finora
- Folleto Piso Tecnico ADfloor - ATDocumento5 pagineFolleto Piso Tecnico ADfloor - ATNeiser VillanuevaNessuna valutazione finora
- Informe de AlgebraDocumento8 pagineInforme de AlgebraCristhian DayalNessuna valutazione finora
- Hoja Tecnica Espaciador PDFDocumento4 pagineHoja Tecnica Espaciador PDFAlanNessuna valutazione finora
- Influencia. La psicología de la persuasiónDa EverandInfluencia. La psicología de la persuasiónValutazione: 4.5 su 5 stelle4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDa Everand7 tendencias digitales que cambiarán el mundoValutazione: 4.5 su 5 stelle4.5/5 (86)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoDa EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoValutazione: 4 su 5 stelle4/5 (30)
- Auditoría de seguridad informática: Curso prácticoDa EverandAuditoría de seguridad informática: Curso prácticoValutazione: 5 su 5 stelle5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDa EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaValutazione: 4.5 su 5 stelle4.5/5 (116)
- Investigación de operaciones: Conceptos fundamentalesDa EverandInvestigación de operaciones: Conceptos fundamentalesValutazione: 4.5 su 5 stelle4.5/5 (2)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDa Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosValutazione: 5 su 5 stelle5/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDa EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másValutazione: 2.5 su 5 stelle2.5/5 (3)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaDa EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaValutazione: 5 su 5 stelle5/5 (1)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Da EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Valutazione: 5 su 5 stelle5/5 (4)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDa EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroValutazione: 4 su 5 stelle4/5 (1)
- Reparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DDa EverandReparar (casi) cualquier cosa: Cómo ajustar los objetos de uso cotidiano con la electrónica y la impresora 3DValutazione: 5 su 5 stelle5/5 (6)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Da EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Valutazione: 4 su 5 stelle4/5 (51)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDa EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetValutazione: 5 su 5 stelle5/5 (7)
- Gestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosDa EverandGestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosValutazione: 5 su 5 stelle5/5 (3)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.Da EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Valutazione: 3.5 su 5 stelle3.5/5 (3)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDa EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasValutazione: 4.5 su 5 stelle4.5/5 (14)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Da EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Valutazione: 4.5 su 5 stelle4.5/5 (54)
- Lean Seis Sigma: La guía definitiva sobre Lean Seis Sigma, Lean Enterprise y Lean Manufacturing, con herramientas para incrementar la eficiencia y la satisfacción del clienteDa EverandLean Seis Sigma: La guía definitiva sobre Lean Seis Sigma, Lean Enterprise y Lean Manufacturing, con herramientas para incrementar la eficiencia y la satisfacción del clienteValutazione: 4.5 su 5 stelle4.5/5 (5)
- Guía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackDa EverandGuía De Hacking De Computadora Para Principiantes: Cómo Hackear Una Red Inalámbrica Seguridad Básica Y Pruebas De Penetración Kali Linux Su Primer HackNessuna valutazione finora