Potrebbero piacerti anche
- EV1 SCR Motor ControllerDocumento32 pagineEV1 SCR Motor ControllerJShearer95% (20)
- CASE 3 Maruti Suzuki Business Intelligence and Enterprise Databases CaseDocumento5 pagineCASE 3 Maruti Suzuki Business Intelligence and Enterprise Databases CaseArif Sudibp' Rahmanda100% (1)
- 2.1 Lab - Setting Up The Lab EnvironmentDocumento5 pagine2.1 Lab - Setting Up The Lab EnvironmentOchoa Bryan-sanNessuna valutazione finora
- ProSacco: The Best Sacco Management SystemDocumento7 pagineProSacco: The Best Sacco Management SystemCyrus M.nNessuna valutazione finora
- 3638 Exercice Verin FlowcodeDocumento7 pagine3638 Exercice Verin FlowcodeSaid AhnicheNessuna valutazione finora
- NEX - Teamcenter Superuser Course Presentation - v06 PDFDocumento298 pagineNEX - Teamcenter Superuser Course Presentation - v06 PDFcad cadNessuna valutazione finora
- Sperry Marine Radar Vision Master PDFDocumento674 pagineSperry Marine Radar Vision Master PDFHugo Tostes40% (5)
- Training Material - AWS Technical Professional Bootcamp - 20200226Documento222 pagineTraining Material - AWS Technical Professional Bootcamp - 20200226Subha ChandraNessuna valutazione finora
- ICP Thermo Comparision GuideDocumento2 pagineICP Thermo Comparision Guidechandresh.soniNessuna valutazione finora
- Pic Mini WebDocumento15 paginePic Mini WebSizwe Martin ZithaNessuna valutazione finora
- 2 Megabit (128 K X 16-Bit) CMOS EPROM: Distinctive CharacteristicsDocumento12 pagine2 Megabit (128 K X 16-Bit) CMOS EPROM: Distinctive CharacteristicsJose Renaldo RenaldoNessuna valutazione finora
- Simplicity With Functionality: Commander SKDocumento16 pagineSimplicity With Functionality: Commander SKJefersson Roberth Mercado Saavedra100% (2)
- 8-Bit Bidirectional Binary Counter (3-State) : Integrated CircuitsDocumento12 pagine8-Bit Bidirectional Binary Counter (3-State) : Integrated CircuitsShadowHollow333Nessuna valutazione finora
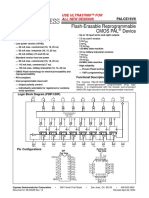
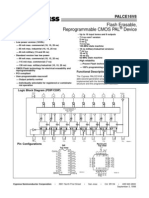
- Flash-Erasable Reprogrammable Cmos Pal Device: Use Ultra37000™ For All New DesignsDocumento13 pagineFlash-Erasable Reprogrammable Cmos Pal Device: Use Ultra37000™ For All New DesignsUlises RojasNessuna valutazione finora
- Palce 16 V 8Documento12 paginePalce 16 V 81webdomainNessuna valutazione finora
- 28f102 Flashable Replacement For 27C1024 or 27C210 PDFDocumento14 pagine28f102 Flashable Replacement For 27C1024 or 27C210 PDFfedeNessuna valutazione finora
- Mini Project: A Simple Xerox Machine Controller: 23 JAN 2021 SECR1013 Digital LogicDocumento19 pagineMini Project: A Simple Xerox Machine Controller: 23 JAN 2021 SECR1013 Digital LogicIsmail LifeNessuna valutazione finora
- CNC 8037 Ordering HandbookDocumento6 pagineCNC 8037 Ordering Handbookgabrielsilva2042Nessuna valutazione finora
- Laboratory Manual: Department of Electronics & Telecommunication EngineeringDocumento37 pagineLaboratory Manual: Department of Electronics & Telecommunication Engineeringsouled oneNessuna valutazione finora
- Optocoupler Selection GuideDocumento28 pagineOptocoupler Selection GuideAnonymous 0CnvpxSNessuna valutazione finora
- Artificial Intelligence Applications in Power Systems SlidesDocumento83 pagineArtificial Intelligence Applications in Power Systems SlidesOmar fethiNessuna valutazione finora
- Artificial Intelligence Applications in Power Systems - Slides PDFDocumento83 pagineArtificial Intelligence Applications in Power Systems - Slides PDFLadla Shyam KaNessuna valutazione finora
- ATF16V8B, ATF16V8BQ, and ATF16V8BQL: FeaturesDocumento27 pagineATF16V8B, ATF16V8BQ, and ATF16V8BQL: FeaturesSimilinga MnyongeNessuna valutazione finora
- 8051 DatasheetDocumento105 pagine8051 Datasheetvarsha muthyalaNessuna valutazione finora
- Master K120 SDocumento11 pagineMaster K120 SYudi MalangNessuna valutazione finora
- D CommSK OverviewDocumento2 pagineD CommSK Overviewnsatish9Nessuna valutazione finora
- Nec 78k0 Kb2Documento27 pagineNec 78k0 Kb2Anonymous pu1L9ZNessuna valutazione finora
- 7 PLC PDFDocumento112 pagine7 PLC PDFBayu RafliNessuna valutazione finora
- TL494 Linear Integrated Circuit: Voltage Mode PWM Control CircuitDocumento7 pagineTL494 Linear Integrated Circuit: Voltage Mode PWM Control CircuitIsrael GonzalesNessuna valutazione finora
- Calnex Paragon X Testing 1588v2Documento38 pagineCalnex Paragon X Testing 1588v2yudi.arfianto100% (1)
- 1 Megabit (128 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocumento13 pagine1 Megabit (128 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsRafaelNessuna valutazione finora
- 1.1 Applications: Single-Chip 16-Bit Cmos MicrocomputerDocumento36 pagine1.1 Applications: Single-Chip 16-Bit Cmos MicrocomputeromarmixNessuna valutazione finora
- AN8011S Panasonic SemiconductorDocumento16 pagineAN8011S Panasonic SemiconductorMendesNessuna valutazione finora
- X4 - Estructura Dels PLC - ResumDocumento42 pagineX4 - Estructura Dels PLC - ResumDavid BaRoNessuna valutazione finora
- Mpro 200 V2 Catalog StandardDocumento20 pagineMpro 200 V2 Catalog StandardVaibhav ShrivastavNessuna valutazione finora
- CAT28F010: Licensed Intel Second SourceDocumento14 pagineCAT28F010: Licensed Intel Second SourceMorteza BaratzadehNessuna valutazione finora
- Wireless World 1995 11 S OCRDocumento100 pagineWireless World 1995 11 S OCRMilton Nast0% (1)
- GPA BoardDocumento13 pagineGPA BoardBrunno SepulcriNessuna valutazione finora
- 08 - Chapter 1 PDFDocumento29 pagine08 - Chapter 1 PDFJaga deshNessuna valutazione finora
- CONECTIVIDADDocumento1 paginaCONECTIVIDADEdwinRamirezNessuna valutazione finora
- Koal Series ManualDocumento38 pagineKoal Series ManualAtul SahaiNessuna valutazione finora
- Am27c010 128kb Cmos Eprom DatasheetDocumento12 pagineAm27c010 128kb Cmos Eprom DatasheetcoronaqcNessuna valutazione finora
- ESE R&A Lab Group-IDocumento6 pagineESE R&A Lab Group-IAbdul Haseeb KhanNessuna valutazione finora
- Flexible Control. Precise Monitoring. Safe Switch-Off.: Tailored Motor Management - Now Also With Safety IntegratedDocumento4 pagineFlexible Control. Precise Monitoring. Safe Switch-Off.: Tailored Motor Management - Now Also With Safety IntegratedseñorbmxNessuna valutazione finora
- CA3100TDocumento7 pagineCA3100THisham MehremNessuna valutazione finora
- Turning Machine ControllerDocumento2 pagineTurning Machine ControllerrichsalgadoNessuna valutazione finora
- User Manual CAC ControllerDocumento18 pagineUser Manual CAC ControllerJuanita Pardo MirandaNessuna valutazione finora
- 4 Megabit (512 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocumento13 pagine4 Megabit (512 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsNelson Monteagudo PuyolNessuna valutazione finora
- PLCC-28: NC Ain4-Rpm AIN3-O2VDocumento8 paginePLCC-28: NC Ain4-Rpm AIN3-O2V肖磊Nessuna valutazione finora
- 128 Kilobit (16 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocumento12 pagine128 Kilobit (16 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsMarcus SilvaNessuna valutazione finora
- Simulación PSpiceDocumento17 pagineSimulación PSpiceSelena García GómezNessuna valutazione finora
- PC Programmable Industrial PLC System: P2 Jumper Open Prog. Close WorkDocumento1 paginaPC Programmable Industrial PLC System: P2 Jumper Open Prog. Close WorkNirmala DeviNessuna valutazione finora
- PLC-K7 Series (K7M-DR60U)Documento2 paginePLC-K7 Series (K7M-DR60U)Suresh MNessuna valutazione finora
- Speed Control of Motor - RKMS ProjectDocumento34 pagineSpeed Control of Motor - RKMS ProjectAmit BarNessuna valutazione finora
- R65C51 Asynchronous Communications: PrelimlnaryDocumento19 pagineR65C51 Asynchronous Communications: PrelimlnaryC S KumarNessuna valutazione finora
- IL NT 2 2 New FeaturesDocumento39 pagineIL NT 2 2 New FeaturesAung MhNessuna valutazione finora
- TLC1542C, TLC1542I, TLC1542M, TLC1542Q, TLC1543C, TLC1543I, TLC1543Q 10-Bit Analog-To-Digital Converters With Serial Control and 11 Analog InputsDocumento27 pagineTLC1542C, TLC1542I, TLC1542M, TLC1542Q, TLC1543C, TLC1543I, TLC1543Q 10-Bit Analog-To-Digital Converters With Serial Control and 11 Analog InputsCarlos Alberto de Andrade Freitas JuniorNessuna valutazione finora
- TMS370Cx0x 8-Bit Microcontroller: FZ and FN Packages (Top View)Documento49 pagineTMS370Cx0x 8-Bit Microcontroller: FZ and FN Packages (Top View)Edison PerezNessuna valutazione finora
- Faculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Documento7 pagineFaculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Rameshkumar JayaramanNessuna valutazione finora
- Am27c256 AmdDocumento12 pagineAm27c256 AmdRafaelNessuna valutazione finora
- LMIDocumento42 pagineLMILakbir100% (3)
- CCM板卡说明Documento2 pagineCCM板卡说明fkmc9ywdchNessuna valutazione finora
- Attiny104 Xplained Nano: Avr 8-Bit MicrocontrollersDocumento15 pagineAttiny104 Xplained Nano: Avr 8-Bit MicrocontrollersOleg StrashenkoNessuna valutazione finora
- 08140h PDFDocumento12 pagine08140h PDFAmine EmineNessuna valutazione finora
- 256 Kilobit (32 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocumento12 pagine256 Kilobit (32 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsAmine EmineNessuna valutazione finora
- Anais Do Workshop De Micro-ondasDa EverandAnais Do Workshop De Micro-ondasNessuna valutazione finora
- Wi-Fi Module and Solarpower App User'S ManualDocumento16 pagineWi-Fi Module and Solarpower App User'S ManualOmegaNet BgNessuna valutazione finora
- EN - Instrukcja - Inwerter Solarny SINUS PRO ULTRA 10000Documento32 pagineEN - Instrukcja - Inwerter Solarny SINUS PRO ULTRA 10000cristiNessuna valutazione finora
- 02 IRF Configuration Guide-BookDocumento37 pagine02 IRF Configuration Guide-BookcristiNessuna valutazione finora
- VE - Direct Non Inverting Remote On-Off CableDocumento1 paginaVE - Direct Non Inverting Remote On-Off CablecristiNessuna valutazione finora
- EVO Display Manual Engelsk 2Documento36 pagineEVO Display Manual Engelsk 2cristiNessuna valutazione finora
- System Manual - Complete - MOVIDRIVE MDX60B - 61BDocumento474 pagineSystem Manual - Complete - MOVIDRIVE MDX60B - 61Bdomenico_leuzzi0% (1)
- BMS FunktionenDocumento1 paginaBMS FunktionencristiNessuna valutazione finora
- Manual Detector Radar Beltronics Pro Rx65i Limba EnglezaDocumento16 pagineManual Detector Radar Beltronics Pro Rx65i Limba EnglezacristiNessuna valutazione finora
- Energus KitDocumento1 paginaEnergus KitcristiNessuna valutazione finora
- EV Powercharger CAN Protocol: Created Last Saved Printed Revision Document No. Prepared by Approved byDocumento24 pagineEV Powercharger CAN Protocol: Created Last Saved Printed Revision Document No. Prepared by Approved bycristiNessuna valutazione finora
- Ev Powercharger Gen1 Parallel ConnectionDocumento5 pagineEv Powercharger Gen1 Parallel ConnectioncristiNessuna valutazione finora
- Flatpack2 48/2000: Rectifier ModuleDocumento2 pagineFlatpack2 48/2000: Rectifier ModulecristiNessuna valutazione finora
- MonitoringDocumento304 pagineMonitoringMesayu Rini PermatasariNessuna valutazione finora
- Eltek Flatpack2 - "Russian Mod": WWW - Ea1Ddo - Es/Flatpack2Documento1 paginaEltek Flatpack2 - "Russian Mod": WWW - Ea1Ddo - Es/Flatpack2cristiNessuna valutazione finora
- Gek 28897B PDFDocumento19 pagineGek 28897B PDFAdrian FerreyraNessuna valutazione finora
- Eltek CAN Interface Protocol PDFDocumento24 pagineEltek CAN Interface Protocol PDFcristiNessuna valutazione finora
- O S E M E V: Ptimised and Ystematic Nergy Anagement in Lectric EhiclesDocumento16 pagineO S E M E V: Ptimised and Ystematic Nergy Anagement in Lectric EhiclescristiNessuna valutazione finora
- MonitoringDocumento304 pagineMonitoringMesayu Rini PermatasariNessuna valutazione finora
- W500 EMS User GuideDocumento44 pagineW500 EMS User GuidecristiNessuna valutazione finora
- Canprimer v2Documento36 pagineCanprimer v2Ananda Krishna100% (1)
- M83 Bios Update ProcedureDocumento4 pagineM83 Bios Update ProcedurecristiNessuna valutazione finora
- EV100LX Instructions With EV200 SupplementDocumento81 pagineEV100LX Instructions With EV200 SupplementAlexandre BatistaNessuna valutazione finora
- W500 EMS User GuideDocumento44 pagineW500 EMS User GuidecristiNessuna valutazione finora
- HFA15PB60: Ultrafast, Soft Recovery Diode HexfredDocumento6 pagineHFA15PB60: Ultrafast, Soft Recovery Diode HexfredcristiNessuna valutazione finora
- Low Profile Self-Leaded Current Sense TransformersDocumento5 pagineLow Profile Self-Leaded Current Sense TransformerscristiNessuna valutazione finora
- TC4426/TC4427/TC4428: 1.5A Dual High-Speed Power MOSFET DriversDocumento20 pagineTC4426/TC4427/TC4428: 1.5A Dual High-Speed Power MOSFET DriverscristiNessuna valutazione finora
- Old Label PDFDocumento1 paginaOld Label PDFcristiNessuna valutazione finora
- Datasheet PDFDocumento9 pagineDatasheet PDFIng MechatronicsNessuna valutazione finora
- Valeo Power ChargerDocumento2 pagineValeo Power ChargercristiNessuna valutazione finora
- InstrDocumento1 paginaInstrNorizham Abdul RazakNessuna valutazione finora
- Bootable USB Drive DEMODocumento41 pagineBootable USB Drive DEMODamn SarucamNessuna valutazione finora
- DWMS Implementation Case Study 3PLDocumento26 pagineDWMS Implementation Case Study 3PLKCSNessuna valutazione finora
- Build A Full Stack Web Application Using Angular and FirebaseDocumento110 pagineBuild A Full Stack Web Application Using Angular and FirebaseAnkur Madaan100% (1)
- 796 Information and Communication Technologies (ICT) - Advanced LevelDocumento33 pagine796 Information and Communication Technologies (ICT) - Advanced LevelDimitriNessuna valutazione finora
- E Learning Project ReportDocumento53 pagineE Learning Project ReportHarikrishnan ShunmugamNessuna valutazione finora
- Storybird TutorialDocumento10 pagineStorybird TutorialRuellyn BalanagNessuna valutazione finora
- Salesforce Entitlements Implementation GuideDocumento50 pagineSalesforce Entitlements Implementation GuideJose TabeayoNessuna valutazione finora
- Configuring SAP For Use With An Independent ASPDocumento20 pagineConfiguring SAP For Use With An Independent ASPSaurabh AroraNessuna valutazione finora
- Exotel Manual Get StartedDocumento15 pagineExotel Manual Get StartedShekhar KumarNessuna valutazione finora
- VMSDocumento34 pagineVMSdedyossoNessuna valutazione finora
- Pent4343 XS-96 Uk L PDFDocumento84 paginePent4343 XS-96 Uk L PDFLOUKILkarimNessuna valutazione finora
- Satellite M65-S9092 Series Detailed Product Specification: Operating System Input DevicesDocumento4 pagineSatellite M65-S9092 Series Detailed Product Specification: Operating System Input Devicestitaneros6019Nessuna valutazione finora
- Ioug Selectjournal 2014q1cDocumento8 pagineIoug Selectjournal 2014q1carunjacNessuna valutazione finora
- Google Analytics - ViziaDocumento8 pagineGoogle Analytics - Viziafranker14Nessuna valutazione finora
- Extended Essay - IBDocumento14 pagineExtended Essay - IBKhalil AlamehNessuna valutazione finora
- XMITIP Install Guide PDFDocumento41 pagineXMITIP Install Guide PDFnagasadhuNessuna valutazione finora
- The in Analysis Databases:: ScienceDocumento33 pagineThe in Analysis Databases:: Sciencegreeen.pat6918Nessuna valutazione finora
- Ddddcopy Data From One File To Another File Using C ProgramDocumento4 pagineDdddcopy Data From One File To Another File Using C ProgramSardar Amandeep SinghNessuna valutazione finora
- 16.79-CH16 - Accessing PDFDocumento79 pagine16.79-CH16 - Accessing PDFRASHMI_HRNessuna valutazione finora
- MCP Certification OutlineDocumento4 pagineMCP Certification OutlinetcwebbusNessuna valutazione finora
- College Management SystemDocumento10 pagineCollege Management SystemKuldeep Parekh100% (1)
- Which Field Differentiates A Table From Client-Dependent and Client-Independent?Documento11 pagineWhich Field Differentiates A Table From Client-Dependent and Client-Independent?salehashaikhNessuna valutazione finora
- Introduction To Xamarin For Visual Studio 2017Documento49 pagineIntroduction To Xamarin For Visual Studio 2017Alek GluvceNessuna valutazione finora