Potrebbero piacerti anche
- Ba Sar2 07 16 Ac2 Ffbus Es PDFDocumento84 pagineBa Sar2 07 16 Ac2 Ffbus Es PDFJL Z AvilesNessuna valutazione finora
- M002Documento1 paginaM002JL Z AvilesNessuna valutazione finora
- Amarex KRT: Manual de Instrucciones de Servicio/montajeDocumento132 pagineAmarex KRT: Manual de Instrucciones de Servicio/montajeJL Z Aviles100% (2)
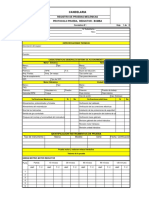
- Candelaria: Registro de Pruebas Mecánicas PEM Protocolo Pruebas Bombas ImpulsiónDocumento2 pagineCandelaria: Registro de Pruebas Mecánicas PEM Protocolo Pruebas Bombas ImpulsiónJL Z Aviles100% (1)
- Candelaria: Registro de Pruebas Mecánicas Protocolo Prueba, Reductor - BombaDocumento2 pagineCandelaria: Registro de Pruebas Mecánicas Protocolo Prueba, Reductor - BombaJL Z AvilesNessuna valutazione finora
- 005 Resumen Accidentes Electricos en MineriaDocumento15 pagine005 Resumen Accidentes Electricos en MineriaJL Z Aviles100% (1)
- Precom 15112018Documento4 paginePrecom 15112018JL Z AvilesNessuna valutazione finora
- 001 Parte 1 Seguridad ElectricaDocumento70 pagine001 Parte 1 Seguridad ElectricaJL Z AvilesNessuna valutazione finora
- Procedimiento IzajeDocumento34 pagineProcedimiento IzajeJL Z Aviles100% (1)
- PE-5017001546-GE-06.00 VigilanciaDocumento24 paginePE-5017001546-GE-06.00 VigilanciaJL Z AvilesNessuna valutazione finora
- Procedimiento TopografiaDocumento11 pagineProcedimiento TopografiaJL Z AvilesNessuna valutazione finora
- Procedimiento IzajeDocumento12 pagineProcedimiento IzajeJL Z AvilesNessuna valutazione finora
- Procedimiento IzajeDocumento12 pagineProcedimiento IzajeJL Z AvilesNessuna valutazione finora
- Procedimiento Trabajo en AlturaDocumento11 pagineProcedimiento Trabajo en AlturaJL Z AvilesNessuna valutazione finora
- Procedimiento Instalación Ferreteria LineaDocumento11 pagineProcedimiento Instalación Ferreteria LineaJL Z Aviles100% (1)
- Solidificacion y AleacionDocumento18 pagineSolidificacion y Aleacionshirley levano davilaNessuna valutazione finora
- El Código ASCII CompletoDocumento4 pagineEl Código ASCII Completojaad61Nessuna valutazione finora
- Manual Bombas ZM (Rev. 2010)Documento4 pagineManual Bombas ZM (Rev. 2010)gbobadillaNessuna valutazione finora
- Paper Máquinas SincronasDocumento11 paginePaper Máquinas SincronasJull Suárez VFNessuna valutazione finora
- Semana 09 Actividad de Aprendizaje Estatica IDocumento5 pagineSemana 09 Actividad de Aprendizaje Estatica IJohn Paul Fajardo CalleNessuna valutazione finora
- Sistema Web para Mejorar El Turismo Rural ComunitarioDocumento299 pagineSistema Web para Mejorar El Turismo Rural ComunitarioGuina Moreno100% (1)
- Silabo Mecanica de Fluidos II-17 BDocumento5 pagineSilabo Mecanica de Fluidos II-17 BNick DipeNessuna valutazione finora
- X360run para Xbox360Documento9 pagineX360run para Xbox360Peter DíazNessuna valutazione finora
- s3 - Investigación de Operaciones - Tareav1Documento2 pagines3 - Investigación de Operaciones - Tareav1juan espinoza0% (2)
- AD428748643768es MX202212Documento2 pagineAD428748643768es MX202212fernandoNessuna valutazione finora
- C y T Potencia MecanicaDocumento3 pagineC y T Potencia Mecanicamayu BvNessuna valutazione finora
- Presentacion CAT 797Documento105 paginePresentacion CAT 797Rodrigo Rios100% (1)
- Pi2796 01 - Es EsDocumento5 paginePi2796 01 - Es EsMICHAEL ANDRES HERNANDEZ ORTIZNessuna valutazione finora
- Pares de Apriete Estandar de VolvoDocumento5 paginePares de Apriete Estandar de Volvojrincon26Nessuna valutazione finora
- 2601 14 07028 PDFDocumento105 pagine2601 14 07028 PDFFrancisco Mendez0% (1)
- Pre Informe 2Documento8 paginePre Informe 2Samuel AruquipaNessuna valutazione finora
- Radiacion Del Cuerpo Negro Solo TextoDocumento13 pagineRadiacion Del Cuerpo Negro Solo Textobernalg0604Nessuna valutazione finora
- Memoria Descriptiva12 (1) ChaclacayoDocumento7 pagineMemoria Descriptiva12 (1) ChaclacayoFRANCISCO LAGONESNessuna valutazione finora
- Ingeniería Mecánica - Estática, Robert W.Soutas-Little PDFDocumento467 pagineIngeniería Mecánica - Estática, Robert W.Soutas-Little PDFMario Ernesto Duran Lopez84% (32)
- Taller Leyes de NewtonDocumento3 pagineTaller Leyes de NewtonKetty Maria Assia PadillaNessuna valutazione finora
- Cinematica DirectaDocumento8 pagineCinematica DirectamikelkatenaNessuna valutazione finora
- Cuadro de Doble Entrada 2Documento2 pagineCuadro de Doble Entrada 2Yuliana PalacioNessuna valutazione finora
- Taller de Materia 9Documento4 pagineTaller de Materia 9CandyRojasNessuna valutazione finora
- Mantenimiento de LimpiezaDocumento15 pagineMantenimiento de LimpiezaJosé AguilarNessuna valutazione finora
- Supervisor de CostosDocumento2 pagineSupervisor de CostosalexanderNessuna valutazione finora
- Manual de BomberosDocumento55 pagineManual de BomberosPROTECCION CIVIL LORETONessuna valutazione finora
- Líquidos y Sólidos PDFDocumento7 pagineLíquidos y Sólidos PDFGaby LizethNessuna valutazione finora
- TPA1370YXADocumento6 pagineTPA1370YXADASIHER2111Nessuna valutazione finora
- Registro de Mantenimiento AnualDocumento1 paginaRegistro de Mantenimiento AnualNATHALY100% (1)
- GUIA 1 Cuarto Periodo FISICADocumento5 pagineGUIA 1 Cuarto Periodo FISICAJaime PorrasNessuna valutazione finora