Potrebbero piacerti anche
- Derivadas funciones realesDocumento1 paginaDerivadas funciones realesAntonio RomeroNessuna valutazione finora
- Estadística Descriptiva: Medidas y Análisis de DatosDocumento94 pagineEstadística Descriptiva: Medidas y Análisis de DatosJOSE DAVID TORRES GONZALEZ0% (1)
- Guia Funcion INVERSADocumento2 pagineGuia Funcion INVERSALaina Betancourth100% (1)
- Guía Práctica de Los Principales Procedimientos Administrativos Que Rigen LDocumento79 pagineGuía Práctica de Los Principales Procedimientos Administrativos Que Rigen Lrosita duranNessuna valutazione finora
- Introduccion A La Inferencia EstadísticaDocumento7 pagineIntroduccion A La Inferencia EstadísticaCarlos100% (1)
- Funcion InversaDocumento4 pagineFuncion InversalosgaNessuna valutazione finora
- Guía Los Héroes Felices, Canto 1Documento3 pagineGuía Los Héroes Felices, Canto 1Tomás AramburúNessuna valutazione finora
- Estadistica InferencialDocumento3 pagineEstadistica InferencialjanoNessuna valutazione finora
- ESTADISTICA (Practica Hasta Medidas de Tendencia Central)Documento5 pagineESTADISTICA (Practica Hasta Medidas de Tendencia Central)angela rpNessuna valutazione finora
- Anon - Test Psicotecnicos Y de Personal Id Ad - ModificadoDocumento103 pagineAnon - Test Psicotecnicos Y de Personal Id Ad - ModificadoJuan Villacura ContrerasNessuna valutazione finora
- Guía de Examen Concurso de CálculoDocumento5 pagineGuía de Examen Concurso de CálculoDamian Chavez DiazNessuna valutazione finora
- Colegio San Pablo Prueba 5 y 6 MatematicasDocumento3 pagineColegio San Pablo Prueba 5 y 6 MatematicasPily Vidal de Salvo100% (1)
- Dossier de Matemática Básica 2024 Estudios GeneralesDocumento166 pagineDossier de Matemática Básica 2024 Estudios Generalesconfrijolarroz65100% (1)
- Examen Derecho Penal II (Noviembre de 2007) - 1Documento5 pagineExamen Derecho Penal II (Noviembre de 2007) - 1Maripi IchdlueNessuna valutazione finora
- Ejercicios Resueltos de LogaritmosDocumento2 pagineEjercicios Resueltos de Logaritmosanotherstupidregistr100% (1)
- La Empresa Como Realidad Economica PDFDocumento4 pagineLa Empresa Como Realidad Economica PDFJuan Pablo MaldonadoNessuna valutazione finora
- Raz. Matematico 2Documento2 pagineRaz. Matematico 2JuniorYana0% (1)
- Principios de La Estadistica Descriptiva e InferencialDocumento7 paginePrincipios de La Estadistica Descriptiva e InferencialBeatriz Gina Herencia FelixNessuna valutazione finora
- Cuarto Medio A PruebaDocumento3 pagineCuarto Medio A PruebaMaDa FlowersNessuna valutazione finora
- Estadistica EjerciciosDocumento26 pagineEstadistica EjerciciosarielNessuna valutazione finora
- Ejercicios Estadística 4º EsoDocumento5 pagineEjercicios Estadística 4º EsoManuel Valdés ÁlvarezNessuna valutazione finora
- Prueba de Razonamiento Abstracto. PP On LineDocumento8 paginePrueba de Razonamiento Abstracto. PP On LineRut VelazquezNessuna valutazione finora
- Potencias y Raiz CuadradaDocumento31 paginePotencias y Raiz CuadradadievdNessuna valutazione finora
- Simulador Comip 1Documento5 pagineSimulador Comip 1YadiraNessuna valutazione finora
- Logica de La Estadistica InferencialDocumento9 pagineLogica de La Estadistica InferencialKaren Sujey LopezNessuna valutazione finora
- Ejercicios MatemáticaDocumento88 pagineEjercicios MatemáticaORIELA100% (1)
- Guía de ÁlgebraDocumento7 pagineGuía de ÁlgebraLorenaRoxanaZamoranoFaríasNessuna valutazione finora
- Aprende a sumar números en la recta numéricaDocumento1 paginaAprende a sumar números en la recta numéricaCesar DpqNessuna valutazione finora
- Taller 2 Estadistica DescriptivaDocumento4 pagineTaller 2 Estadistica DescriptivaMateo VianchaNessuna valutazione finora
- 1.-Inferencia EstadisticaDocumento22 pagine1.-Inferencia EstadisticasaulNessuna valutazione finora
- Medidas de DispersiónDocumento3 pagineMedidas de DispersiónEdwards Veramendi CaushiNessuna valutazione finora
- Calculo Nicolas Diaz 1101Documento7 pagineCalculo Nicolas Diaz 1101JUAN FELIPE DIAZ ROMERONessuna valutazione finora
- Derecho Tributrio 1Documento27 pagineDerecho Tributrio 1Mansilla CésarNessuna valutazione finora
- Rel - Temas 6-7.16-17Documento4 pagineRel - Temas 6-7.16-17Jose Fina GarciaNessuna valutazione finora
- Control 2 Orden y Comparacion DescomposiconDocumento6 pagineControl 2 Orden y Comparacion DescomposiconMiguel Vargas DiazNessuna valutazione finora
- Bases de La Institucionalidad ChilenaDocumento36 pagineBases de La Institucionalidad Chilenagerson cardemilNessuna valutazione finora
- Prueba de Razonamiento Abstracto Color y FormaDocumento13 paginePrueba de Razonamiento Abstracto Color y FormaBolivar PozoNessuna valutazione finora
- Guia Ejercicios Correlación y RegresionDocumento2 pagineGuia Ejercicios Correlación y Regresiongenrrychacon0% (1)
- GUIA Ejercicios de ECONOMETRIADocumento59 pagineGUIA Ejercicios de ECONOMETRIAEdgar QuintanaNessuna valutazione finora
- Resolución de ejercicios prácticos de matemáticaDocumento6 pagineResolución de ejercicios prácticos de matemáticaMarianaBartheNessuna valutazione finora
- Guia 3 Variable AleatoriaDocumento2 pagineGuia 3 Variable AleatoriaPedronavarrete 123Nessuna valutazione finora
- Probabilidad: Test de 10 preguntasDocumento6 pagineProbabilidad: Test de 10 preguntasAmparito CantilloNessuna valutazione finora
- Medidas de PosiciónDocumento10 pagineMedidas de PosiciónLupita Martínez de FloresNessuna valutazione finora
- Examen Matemáticas Tipo Test 3 EvDocumento4 pagineExamen Matemáticas Tipo Test 3 EvFrancisco Mateo RamírezNessuna valutazione finora
- Tema 3. ProbabilidadDocumento56 pagineTema 3. ProbabilidadE&G100% (1)
- Guia de Porcentajes 7º BásicoDocumento3 pagineGuia de Porcentajes 7º Básicocassije2005Nessuna valutazione finora
- Calculo DiferencialDocumento11 pagineCalculo DiferencialANDRES CAMILO AGUIRRE USUGANessuna valutazione finora
- Práctica Matemática Agronomía CBCDocumento79 paginePráctica Matemática Agronomía CBCuniversoexactoNessuna valutazione finora
- Teoría combinatoria: Principios del conteo y técnicasDocumento6 pagineTeoría combinatoria: Principios del conteo y técnicasRosa Rosiris Daza Quiroz100% (3)
- 5to Basico La MateriaDocumento2 pagine5to Basico La MateriaSirjorgejimenezNessuna valutazione finora
- Trigonometría Saco PDFDocumento10 pagineTrigonometría Saco PDFMaico LMNessuna valutazione finora
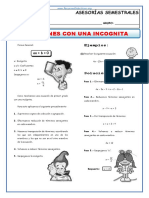
- ACT. 2 Ecuaciones Con Una IncognitaDocumento3 pagineACT. 2 Ecuaciones Con Una IncognitaNicolas Becerril OrtizNessuna valutazione finora
- Medidas de Tendencias CentralDocumento2 pagineMedidas de Tendencias CentralFabioVega100% (1)
- 1 Inferencia EstadísticaDocumento14 pagine1 Inferencia EstadísticaLuis Angel Meza QuispeNessuna valutazione finora
- 5-Estimaci N Puntual y Por IntervaloDocumento49 pagine5-Estimaci N Puntual y Por IntervaloGustavo FloresNessuna valutazione finora
- Grupo Nº5-Muestreo SistematicoDocumento32 pagineGrupo Nº5-Muestreo SistematicoHanny Mirella Rojas Rivera100% (1)
- Clase 11 - Estadística Inferencial Estimador Puntual y Distribuciones de MuestreoDocumento24 pagineClase 11 - Estadística Inferencial Estimador Puntual y Distribuciones de MuestreoJeyder GeorgeNessuna valutazione finora
- U4 - Estimación Por Intervalos de Confianza y Tipos de MuestreoDocumento64 pagineU4 - Estimación Por Intervalos de Confianza y Tipos de MuestreoAlondraNessuna valutazione finora
- PARCIAL1 ESTA2 VTablasDocumento13 paginePARCIAL1 ESTA2 VTablasSantiago LealNessuna valutazione finora
- Estadísticas de Desempeño y Escala de Puertos, Numero de Puertos Anual (Vivanco)Documento5 pagineEstadísticas de Desempeño y Escala de Puertos, Numero de Puertos Anual (Vivanco)Luis Miguel VivancoNessuna valutazione finora
- Conclusiones TrabajoDocumento1 paginaConclusiones TrabajoLuis Miguel VivancoNessuna valutazione finora
- Resolución de caso del CAE para el Ingenio Manuelita S.A: Cosecha manual vs mecánicaDocumento6 pagineResolución de caso del CAE para el Ingenio Manuelita S.A: Cosecha manual vs mecánicaLuis Miguel VivancoNessuna valutazione finora
- 2da P.C. PROYECTOS PUBLICOS Vivanco Ramos LuisDocumento5 pagine2da P.C. PROYECTOS PUBLICOS Vivanco Ramos LuisLuis Miguel VivancoNessuna valutazione finora
- Velas JaponesasDocumento1 paginaVelas JaponesasLuis Miguel VivancoNessuna valutazione finora
- Caso Enron 1Documento6 pagineCaso Enron 1Luis Miguel VivancoNessuna valutazione finora
- Valor IntrinsicoDocumento4 pagineValor IntrinsicoLuis Miguel VivancoNessuna valutazione finora
- Tarea de Macro IIIDocumento8 pagineTarea de Macro IIILuis Miguel VivancoNessuna valutazione finora
- PRINCIPIOS DEL INVERSOR LuisDocumento3 paginePRINCIPIOS DEL INVERSOR LuisLuis Miguel VivancoNessuna valutazione finora
- Método Centro de Gravedad LuisDocumento2 pagineMétodo Centro de Gravedad LuisLuis Miguel VivancoNessuna valutazione finora
- CASO 1.demanda PotencialDocumento4 pagineCASO 1.demanda PotencialLuis Miguel VivancoNessuna valutazione finora
- EJERCICIOS Benefico - CostoDocumento9 pagineEJERCICIOS Benefico - CostoLuis Miguel VivancoNessuna valutazione finora
- El Dilema Del CiervoDocumento1 paginaEl Dilema Del CiervoLuis Miguel VivancoNessuna valutazione finora
- Proyecto de Publicos AA - HH Los CedrosDocumento17 pagineProyecto de Publicos AA - HH Los CedrosLuis Miguel Vivanco100% (1)
- Teoria. Amortizaciones.Documento26 pagineTeoria. Amortizaciones.Luis Miguel Vivanco100% (2)
- CAPITULO - 2 (Proyectos)Documento39 pagineCAPITULO - 2 (Proyectos)Luis Miguel VivancoNessuna valutazione finora
- TrabajoDocumento32 pagineTrabajoLuis Miguel Vivanco100% (1)
- El Dilema Del CiervoDocumento1 paginaEl Dilema Del CiervoLuis Miguel VivancoNessuna valutazione finora
- Caso 4 ComercioDocumento5 pagineCaso 4 ComercioLuis Miguel VivancoNessuna valutazione finora
- Caso 3 ProducciónDocumento5 pagineCaso 3 ProducciónLuis Miguel VivancoNessuna valutazione finora
- Los FisiocratasDocumento4 pagineLos FisiocratasLuis Miguel VivancoNessuna valutazione finora
- Cómo Debería Ser El Perú Post PandemiaDocumento3 pagineCómo Debería Ser El Perú Post PandemiaLuis Miguel VivancoNessuna valutazione finora
- El caso Enron: fraude contable y quiebra de una empresaDocumento7 pagineEl caso Enron: fraude contable y quiebra de una empresaGuisella Neira PerezNessuna valutazione finora
- Caso Enron 1Documento6 pagineCaso Enron 1Luis Miguel VivancoNessuna valutazione finora
- Los ClasicosDocumento8 pagineLos ClasicosFrancia Cristhian JuanNessuna valutazione finora
- Ejercicio 9Documento3 pagineEjercicio 9Luis Miguel Vivanco100% (1)
- Introduccion de Las Polìticas SocialesDocumento36 pagineIntroduccion de Las Polìticas SocialesLuis Miguel VivancoNessuna valutazione finora
- MERCADO DIVISAS IntroDocumento71 pagineMERCADO DIVISAS IntroLuis Miguel VivancoNessuna valutazione finora
- Orga TrabajoDocumento6 pagineOrga TrabajoLuis Miguel VivancoNessuna valutazione finora
- Castillo SaDocumento3 pagineCastillo SaLuis Miguel VivancoNessuna valutazione finora
- Aristóteles y La Teoría Del Género Literario - Cerezo MagánDocumento12 pagineAristóteles y La Teoría Del Género Literario - Cerezo MagánBabilonia CruzNessuna valutazione finora
- Planeación #2 Del 15 Al 15 de Septiembre-2021-2022.Documento7 paginePlaneación #2 Del 15 Al 15 de Septiembre-2021-2022.missnydia delrealNessuna valutazione finora
- Listado de Enfermedades ProfesionalesDocumento3 pagineListado de Enfermedades Profesionalesalexandra_sexy18Nessuna valutazione finora
- Protocolo Individual Unid 2 - Talento HumanoDocumento7 pagineProtocolo Individual Unid 2 - Talento HumanoEdgarMiguelConeoHerreraNessuna valutazione finora
- Antecedentes Del HumanismoDocumento3 pagineAntecedentes Del HumanismoAlejandro León50% (2)
- XIV CENSO NACIONAL DE POBLACIÓN Y VIVIENDA Resultados Por Entidad Federal y Municipio Del Estado CaraboboDocumento96 pagineXIV CENSO NACIONAL DE POBLACIÓN Y VIVIENDA Resultados Por Entidad Federal y Municipio Del Estado Carabobomicuccig100% (1)
- Antología de Probabilidad y Estadística I PDFDocumento72 pagineAntología de Probabilidad y Estadística I PDFEsteban Mateus Williamson50% (2)
- TrietilenglicolDocumento12 pagineTrietilenglicolWilmerNessuna valutazione finora
- La Entrevista Estructurada Y TEMAS de PNLDocumento22 pagineLa Entrevista Estructurada Y TEMAS de PNLJavier Perez DNessuna valutazione finora
- Biologia 1Documento20 pagineBiologia 1Claudia Paola Saavedra NeumannNessuna valutazione finora
- Ejercicios y Mapas de ProcesoDocumento17 pagineEjercicios y Mapas de ProcesoLuis Roger Martinez ZaldivarNessuna valutazione finora
- Diseño de Muros de RetenciónDocumento33 pagineDiseño de Muros de RetenciónLuis BenitezNessuna valutazione finora
- Diario Cajamarca 08-12-2018Documento24 pagineDiario Cajamarca 08-12-2018Torres Rojas VictorNessuna valutazione finora
- Control Acceso BDDocumento23 pagineControl Acceso BDFilonela Placida Neira RiveraNessuna valutazione finora
- Listo Guìa de Trabajo de ObservaciònDocumento15 pagineListo Guìa de Trabajo de ObservaciònCristian RevolorioNessuna valutazione finora
- Firma 7 - Sección Af92 Exposición - TempomaticDocumento25 pagineFirma 7 - Sección Af92 Exposición - TempomaticHéctor OlivasNessuna valutazione finora
- Cómo Evaluar Un PolinomioDocumento4 pagineCómo Evaluar Un PolinomiopotensNessuna valutazione finora
- Satelites en Orbitas Circulares y Leyes de KeplerDocumento47 pagineSatelites en Orbitas Circulares y Leyes de KeplerRoberto Laguna100% (1)
- Revalorando cultura peruanaDocumento4 pagineRevalorando cultura peruanaELEAZAR JESUS MOLINA ROJASNessuna valutazione finora
- 7 y 8 EstadísticaDocumento6 pagine7 y 8 EstadísticaKarina Henostroza AyalaNessuna valutazione finora
- Muestreo UCSSDocumento27 pagineMuestreo UCSScristinaNessuna valutazione finora
- Cómo Evitar Entradas Falsas en Un EventoDocumento4 pagineCómo Evitar Entradas Falsas en Un EventoWILDNessuna valutazione finora
- Productos notables guía matemáticas grado 8Documento4 pagineProductos notables guía matemáticas grado 8PoliMartinezNessuna valutazione finora
- Bonini, MarceloDocumento2 pagineBonini, MarceloMarcelo BoniniNessuna valutazione finora
- Test Entrevista de Trabajo Christopher MontaldoDocumento3 pagineTest Entrevista de Trabajo Christopher MontaldoJose Pacheco0% (1)
- Actividad2 - Clara. Versión para Compartir Con Errores para ReflexiónDocumento12 pagineActividad2 - Clara. Versión para Compartir Con Errores para ReflexiónalejamontiNessuna valutazione finora
- Pei Por Procesos y ResultadosDocumento51 paginePei Por Procesos y Resultadoswaldo briozoNessuna valutazione finora
- Anexo 1 - Informes Comision de Evaluación (5) - ShareDocumento21 pagineAnexo 1 - Informes Comision de Evaluación (5) - ShareJorge Luis GómezNessuna valutazione finora
- Pedagogía EmprendedoraDocumento2 paginePedagogía EmprendedoraAna Ines SadabaNessuna valutazione finora
- Informe de Laboratorio Movimiento de Caida LibreDocumento8 pagineInforme de Laboratorio Movimiento de Caida LibreCristian Fernando OrtizNessuna valutazione finora