Potrebbero piacerti anche
- Práctica #4 Densidad de Una Muestra de Suelo Tallada GeometricamenteDocumento14 paginePráctica #4 Densidad de Una Muestra de Suelo Tallada GeometricamenteJennyfer Serrano100% (1)
- Proctor Estandar Modificado-UpaoDocumento5 pagineProctor Estandar Modificado-UpaoAntony Zavaleta100% (1)
- Caida Libre en Ecuaciones DiferencialesDocumento24 pagineCaida Libre en Ecuaciones DiferencialesAARON FABRICIO MEJIA BACANessuna valutazione finora
- Mecánica de SuelosDocumento6 pagineMecánica de SuelosAlexamder Mejia RojasNessuna valutazione finora
- Aplicacion Macizo RocosoDocumento32 pagineAplicacion Macizo RocosoKatherine TorresNessuna valutazione finora
- Análisis granulométrico de agregadosDocumento15 pagineAnálisis granulométrico de agregadosLuis Barrera PaucarNessuna valutazione finora
- Oscilador armónico forzado: resonancia y factor de amplificaciónDocumento7 pagineOscilador armónico forzado: resonancia y factor de amplificaciónCarolina PacherrezNessuna valutazione finora
- EDP Alpicado en CIVILDocumento23 pagineEDP Alpicado en CIVILHERMINIO JAVIER LAURANessuna valutazione finora
- Analisis Estadistico SeguridadDocumento15 pagineAnalisis Estadistico SeguridadJ Andre Medina DiazNessuna valutazione finora
- Ejemplos Movimiento ParabolicoDocumento2 pagineEjemplos Movimiento ParabolicoCinthia cayoNessuna valutazione finora
- Seminario para Examen T2 - Cálculo 1Documento2 pagineSeminario para Examen T2 - Cálculo 1brianrcq95Nessuna valutazione finora
- Geologia Contraccion de Suelos Finos Por Efecto CapilaridadDocumento2 pagineGeologia Contraccion de Suelos Finos Por Efecto CapilaridadCristian Rodriguez100% (1)
- Trigonometria Plana y EsfericaDocumento28 pagineTrigonometria Plana y EsfericaPaola De la CruzNessuna valutazione finora
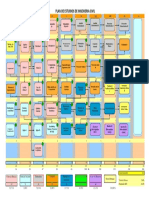
- Flujograma CivilDocumento1 paginaFlujograma CivilMichael BonillaNessuna valutazione finora
- 3er Ex. Pract. de Hidro 2021-1Documento6 pagine3er Ex. Pract. de Hidro 2021-1Edwin David huarancca levitaNessuna valutazione finora
- Caja de Cambios CalculosDocumento15 pagineCaja de Cambios Calculospablo JimenezNessuna valutazione finora
- Efectos salitre construcciones PimentelDocumento26 pagineEfectos salitre construcciones PimentelClarck TorresNessuna valutazione finora
- Marco Teorico para Hallar Valores y Vectores PropiosDocumento5 pagineMarco Teorico para Hallar Valores y Vectores PropiosEdison GuerreroNessuna valutazione finora
- Informe Limites de ConsistenciaDocumento10 pagineInforme Limites de ConsistenciaEsteban QuiñonesNessuna valutazione finora
- Comportamiento no lineal de sólidosDocumento102 pagineComportamiento no lineal de sólidosMaría José SicchaNessuna valutazione finora
- Física de Fluidos - Taller Acumulativo No. 2Documento4 pagineFísica de Fluidos - Taller Acumulativo No. 2Paul SalazarNessuna valutazione finora
- 3º PracticaDocumento5 pagine3º PracticaErland Mauricio Pardo MonroyNessuna valutazione finora
- TEMA 4 ALGEBRA NIVEL PREUNIVERSITARIO Inecuaciones de Primer GradoDocumento5 pagineTEMA 4 ALGEBRA NIVEL PREUNIVERSITARIO Inecuaciones de Primer GradoJorge Luis Huaman TelloNessuna valutazione finora
- Ensayo de Contraccion LinealDocumento9 pagineEnsayo de Contraccion LinealRomelCarMorNessuna valutazione finora
- Aplicaciones de Integrales Multiples A La Fisica PDFDocumento8 pagineAplicaciones de Integrales Multiples A La Fisica PDFJaime Joel Santos50% (2)
- Semana #3Documento19 pagineSemana #3Alan W SanchezNessuna valutazione finora
- Experimento de ConsolidaciónDocumento34 pagineExperimento de ConsolidaciónOscar AguilarNessuna valutazione finora
- Ecuaciones DiferencialesDocumento12 pagineEcuaciones DiferencialesKevin ArteagaNessuna valutazione finora
- Laboratorio N ° 01Documento29 pagineLaboratorio N ° 01Los Chiroque GamarraNessuna valutazione finora
- Tensor Métrico - Wikipedia, La Enciclopedia LibreDocumento21 pagineTensor Métrico - Wikipedia, La Enciclopedia LibreFranklin MarchettiNessuna valutazione finora
- MATEMATICasDocumento5 pagineMATEMATICasFranks Edward Huaman AtaoNessuna valutazione finora
- Ntegrales Ntegrales de SuperficieDocumento19 pagineNtegrales Ntegrales de SuperficieElias MuñozNessuna valutazione finora
- Estadistica Aplicada A La AdministracionDocumento17 pagineEstadistica Aplicada A La Administracionmaria camargoNessuna valutazione finora
- Relacion AguaDocumento4 pagineRelacion AguaMiguel Murga FloresNessuna valutazione finora
- Dinamica 3era PCDocumento2 pagineDinamica 3era PCJesus Alvites LopezNessuna valutazione finora
- Primera Clase EsfuerzoDocumento32 paginePrimera Clase EsfuerzoMiguel Angel EscobarNessuna valutazione finora
- Trabajo 4 Ec. DiferencialesDocumento15 pagineTrabajo 4 Ec. DiferencialesYherald Hurtado CarbajalNessuna valutazione finora
- Unasam Fic Practica Dirigida Sobre Momento Torque OlvgDocumento6 pagineUnasam Fic Practica Dirigida Sobre Momento Torque OlvgYorman0% (1)
- Curva de calibración hidrológica por método logarítmicoDocumento3 pagineCurva de calibración hidrológica por método logarítmicoLxferPeñaNessuna valutazione finora
- Taquimetría TopografíaDocumento4 pagineTaquimetría TopografíaNinoska Figueroa ViteNessuna valutazione finora
- DINAMICA Problemas ResueltosDocumento6 pagineDINAMICA Problemas ResueltosArturo MejiaNessuna valutazione finora
- TallerPropiedadesFisicas PDFDocumento2 pagineTallerPropiedadesFisicas PDFHernan Pacheco AgamezNessuna valutazione finora
- Brujula y EclimetroDocumento7 pagineBrujula y EclimetroCarlos Campos PeronaNessuna valutazione finora
- Estadistica-Descriptiva Ingenieria CivilDocumento13 pagineEstadistica-Descriptiva Ingenieria CivilCarla Noelia Briceño Estrada0% (1)
- Planos Tangentes A Superficie de RevolucióDocumento21 paginePlanos Tangentes A Superficie de RevolucióTuneles FIGMMNessuna valutazione finora
- Ecuación de BernoulliDocumento15 pagineEcuación de BernoulliRuben Eduardo Orellana RodriguezNessuna valutazione finora
- Taller 1 Mecánica de SuelosDocumento14 pagineTaller 1 Mecánica de Suelosjesus gabriel ortega zuñigaNessuna valutazione finora
- Tecnologia de MaterialesDocumento14 pagineTecnologia de MaterialesWILLY ALVARO RODRIGUEZ CHAVEZNessuna valutazione finora
- Cap1-Consistencia de La RedDocumento54 pagineCap1-Consistencia de La RedlarryNessuna valutazione finora
- Sem.15-Métodos-Act.-Seclén Machado RossioDocumento11 pagineSem.15-Métodos-Act.-Seclén Machado RossioRossioNessuna valutazione finora
- Linealización de una función por método analítico de mínimos cuadradosDocumento7 pagineLinealización de una función por método analítico de mínimos cuadradosMarli Lizeth Rincon EslavaNessuna valutazione finora
- INFORME 7 Ensayo de Módulo de Elasticidad en ConcretoDocumento11 pagineINFORME 7 Ensayo de Módulo de Elasticidad en ConcretoWilmer VillamizarNessuna valutazione finora
- Fenómenos de remoción en masa en Mocoa, PutumayoDocumento35 pagineFenómenos de remoción en masa en Mocoa, PutumayoJuan CuasqueNessuna valutazione finora
- ProbabilidadesDocumento29 pagineProbabilidadesjuanper01Nessuna valutazione finora
- Propiedades Físicas y Mecánicas de Los Materiales RocososDocumento48 paginePropiedades Físicas y Mecánicas de Los Materiales RocososFabricio GualotuñaNessuna valutazione finora
- Informe de Geomatica 1Documento6 pagineInforme de Geomatica 1Boris Agudelo BuenoNessuna valutazione finora
- Laboratorio Limites GeotécniaDocumento24 pagineLaboratorio Limites GeotécniaDiego Arley Valero LopezNessuna valutazione finora
- Ejericicio 2-85 HibbelerDocumento6 pagineEjericicio 2-85 HibbelerSergio SanchezNessuna valutazione finora
- Algebra Lineal Parte 2ADocumento26 pagineAlgebra Lineal Parte 2AHeidi Fernanda Segura SánchezNessuna valutazione finora
- Semana 5Documento13 pagineSemana 5josse obandoNessuna valutazione finora
- Ejercicios VRC - LRC - CRCDocumento2 pagineEjercicios VRC - LRC - CRCTezoquitl PantliNessuna valutazione finora
- Practica Codigos de Linea Utilizando MatlabDocumento8 paginePractica Codigos de Linea Utilizando MatlabTezoquitl PantliNessuna valutazione finora
- Ecuación diferencial de coeficientes constantes con raíces complejasDocumento15 pagineEcuación diferencial de coeficientes constantes con raíces complejasTezoquitl Pantli0% (1)
- Ecuaciones Diferenciales LinealesDocumento19 pagineEcuaciones Diferenciales LinealesTezoquitl PantliNessuna valutazione finora
- El Ejercicio Lo Resolveremos Con La Siguiente Formula: Y Nuestro Ejercicio Es: L (Sen At)Documento26 pagineEl Ejercicio Lo Resolveremos Con La Siguiente Formula: Y Nuestro Ejercicio Es: L (Sen At)Tezoquitl PantliNessuna valutazione finora
- EDOPO Eq. 9Documento9 pagineEDOPO Eq. 9Tezoquitl PantliNessuna valutazione finora
- Transformada de Laplace de Funciones Escalonadas 5: - F (T) - 1, 0 7Documento14 pagineTransformada de Laplace de Funciones Escalonadas 5: - F (T) - 1, 0 7Tezoquitl PantliNessuna valutazione finora
- Ya No Seas Codependiente-Beattie MelodyDocumento114 pagineYa No Seas Codependiente-Beattie MelodyTezoquitl PantliNessuna valutazione finora
- 153 A 170Documento26 pagine153 A 170Tezoquitl PantliNessuna valutazione finora
- Ecuacion Diferencial de Orden 4 Con Coeficientes Constantes Y Complejas MultiplesDocumento15 pagineEcuacion Diferencial de Orden 4 Con Coeficientes Constantes Y Complejas MultiplesTezoquitl PantliNessuna valutazione finora
- Ecuaciones Diferenciales PDFDocumento12 pagineEcuaciones Diferenciales PDFTezoquitl PantliNessuna valutazione finora
- Orden Y Grado de Una Ecuacion DiferencialDocumento12 pagineOrden Y Grado de Una Ecuacion DiferencialTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 6 EDDocumento10 pagineUNIDAD 1 Eq. 6 EDTezoquitl PantliNessuna valutazione finora
- EDOPO Eq. 2Documento22 pagineEDOPO Eq. 2Tezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 4 EDDocumento6 pagineUNIDAD 1 Eq. 4 EDTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 1 EDDocumento22 pagineUNIDAD 1 Eq. 1 EDTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 8 EDDocumento8 pagineUNIDAD 1 Eq. 8 EDTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 4 EDDocumento6 pagineUNIDAD 1 Eq. 4 EDTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 10Documento11 pagineUNIDAD 1 Eq. 10Tezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 10Documento15 pagineUNIDAD 1 Eq. 10Tezoquitl PantliNessuna valutazione finora
- Calculo Vectorial Unidad 1Documento29 pagineCalculo Vectorial Unidad 1Tezoquitl Pantli100% (2)
- UNIDAD 1 Eq. 10Documento15 pagineUNIDAD 1 Eq. 10Tezoquitl PantliNessuna valutazione finora
- Bases lineales y dependenciaDocumento25 pagineBases lineales y dependenciaTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq. 8 EDDocumento18 pagineUNIDAD 1 Eq. 8 EDTezoquitl PantliNessuna valutazione finora
- Espacios VectorialesDocumento80 pagineEspacios VectorialesTezoquitl Pantli100% (3)
- Rango y nulidad de una matrizDocumento18 pagineRango y nulidad de una matrizTezoquitl PantliNessuna valutazione finora
- UNIDAD 1 Eq 5 EDDocumento17 pagineUNIDAD 1 Eq 5 EDTezoquitl PantliNessuna valutazione finora
- Espacios VectorialesDocumento80 pagineEspacios VectorialesTezoquitl Pantli100% (3)
- Rango y nulidad de una matrizDocumento18 pagineRango y nulidad de una matrizTezoquitl PantliNessuna valutazione finora
- Calculo Vectorial...Documento4 pagineCalculo Vectorial...Misael Yam CanulNessuna valutazione finora
- Espacios y Subespacios VectorialesDocumento28 pagineEspacios y Subespacios VectorialesShirley ZagacetaNessuna valutazione finora
- 2022 Teoría Capítulo 1Documento28 pagine2022 Teoría Capítulo 1Cristina Del Valle QuesadaNessuna valutazione finora
- Cálculo Vectorial: Producto Escalar y Producto VectorialDocumento5 pagineCálculo Vectorial: Producto Escalar y Producto VectorialEduardiodoNessuna valutazione finora
- Espacios Vectoriales CaracteristicasDocumento2 pagineEspacios Vectoriales CaracteristicasMiguel Ángel Acevedo ReyesNessuna valutazione finora
- Algebra 4 UnidadDocumento10 pagineAlgebra 4 Unidadjuan carlos perez castroNessuna valutazione finora
- Álgebra Lineal Extra 4Documento4 pagineÁlgebra Lineal Extra 4Misael Ayala0% (2)
- Espacios VectorialesDocumento17 pagineEspacios VectorialesGUTIERREZ PEREZ JOHAN ANDRESNessuna valutazione finora
- Magnitudes VectorialesDocumento10 pagineMagnitudes VectorialesCarolina Bravo BastidasNessuna valutazione finora
- Guía 2022 - M1 - Unidad 2 RespuestasDocumento24 pagineGuía 2022 - M1 - Unidad 2 RespuestasFiorella GamboneNessuna valutazione finora
- FICHAS ACTIVIDADES 1 - Vectores-2BTDocumento2 pagineFICHAS ACTIVIDADES 1 - Vectores-2BTcrimNessuna valutazione finora
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO9)Documento16 pagineEvaluacion Final - Escenario 8 - PRIMER BLOQUE-CIENCIAS BASICAS - ALGEBRA LINEAL - (GRUPO9)ballenjavierNessuna valutazione finora
- Subespacios Vectoriales - EspolDocumento2 pagineSubespacios Vectoriales - EspolSergio Suarez CruzNessuna valutazione finora
- Espacio EuclideoDocumento20 pagineEspacio Euclideoluis quitianNessuna valutazione finora
- Anexo 1 Ejercicios y Formato Tarea - 1 - 140Documento19 pagineAnexo 1 Ejercicios y Formato Tarea - 1 - 140Link Acer Rendo0% (1)
- Tarea 1Documento3 pagineTarea 1RulolrNessuna valutazione finora
- 1 01 03 Introduccion-a-la-MatematicaDocumento4 pagine1 01 03 Introduccion-a-la-MatematicaFranRibaNessuna valutazione finora
- Currículo-priorizado-para-la-Fase-2 BACHILLERATODocumento15 pagineCurrículo-priorizado-para-la-Fase-2 BACHILLERATONinfa Díaz DíazNessuna valutazione finora
- Practica 3Documento22 paginePractica 3Omar RuizNessuna valutazione finora
- Magnitudes Escalares y VectorialesDocumento12 pagineMagnitudes Escalares y VectorialesJuan ValdiviasNessuna valutazione finora
- Álgebra Lineal - ZaldivarDocumento215 pagineÁlgebra Lineal - Zaldivarguido100% (3)
- Angulos Directores de Un Vector TeoriaDocumento13 pagineAngulos Directores de Un Vector TeoriaDavid Blancos80% (5)
- Modulo - 2 Fisica MecanicaDocumento35 pagineModulo - 2 Fisica MecanicaJosé MaselNessuna valutazione finora
- 2 Algebra VectorialDocumento81 pagine2 Algebra VectorialAdriana MoreNessuna valutazione finora
- Vectores en El EspacioDocumento12 pagineVectores en El EspacioMikeNessuna valutazione finora
- EnsayoDocumento6 pagineEnsayoJancNessuna valutazione finora
- Magnitudes escalares y vectorialesDocumento5 pagineMagnitudes escalares y vectorialesManuel José Rodríguez MillánNessuna valutazione finora
- Proyecto Final2021Documento10 pagineProyecto Final2021OV GutNessuna valutazione finora
- CLASE No 3 CONCEPTOS Y OPERACIONES DE VECTORES 2D - 3D v1 PDFDocumento40 pagineCLASE No 3 CONCEPTOS Y OPERACIONES DE VECTORES 2D - 3D v1 PDFMelissa VeraNessuna valutazione finora
- Álgebra vectorial fundamentosDocumento17 pagineÁlgebra vectorial fundamentosmoises :DDDNessuna valutazione finora