Potrebbero piacerti anche
- Robotics: Designing the Mechanisms for Automated MachineryDa EverandRobotics: Designing the Mechanisms for Automated MachineryValutazione: 4.5 su 5 stelle4.5/5 (8)
- Electro PneumaticsDocumento17 pagineElectro PneumaticsYomifi AberaNessuna valutazione finora
- Lec.02 - Bulky EquipmentDocumento37 pagineLec.02 - Bulky EquipmentmoosuhaibNessuna valutazione finora
- Lovato Butoane SelectoareDocumento52 pagineLovato Butoane SelectoaretruscamihaiNessuna valutazione finora
- Onderdelenlijst Bediening DSEDocumento24 pagineOnderdelenlijst Bediening DSEbsb.edhoeNessuna valutazione finora
- Attention: Please Read This Manual Prior To Installing and Operating Your Door. Recheck Your Work Before OperationDocumento28 pagineAttention: Please Read This Manual Prior To Installing and Operating Your Door. Recheck Your Work Before Operationjhonny MamaniNessuna valutazione finora
- Ballorex PICV 2017Documento64 pagineBallorex PICV 2017Don Roseller DumayaNessuna valutazione finora
- BS274 20111121Documento87 pagineBS274 20111121Lucas ZelioliNessuna valutazione finora
- 1.2.5.A.VEX MechanicalSystemEfficiencyDocumento10 pagine1.2.5.A.VEX MechanicalSystemEfficiencyAbel MathewNessuna valutazione finora
- 2.8 Electromechanical System Transfer Functions: - DC MotorDocumento5 pagine2.8 Electromechanical System Transfer Functions: - DC MotorNickNessuna valutazione finora
- 06-Us LocationDocumento123 pagine06-Us LocationShreyas ParabNessuna valutazione finora
- Lect 16 19EEE111 Rectifier and Zener DiodeDocumento38 pagineLect 16 19EEE111 Rectifier and Zener DiodeDenifer DeepNessuna valutazione finora
- MI Unit 1 2022 1662623571633Documento108 pagineMI Unit 1 2022 1662623571633Prashon GNessuna valutazione finora
- Bioprocess Reactor Design 31S3206: PendahuluanDocumento18 pagineBioprocess Reactor Design 31S3206: Pendahuluanandro sihombingNessuna valutazione finora
- Ch.02 Modeling of Vibratory SystemsDocumento17 pagineCh.02 Modeling of Vibratory SystemsanleNessuna valutazione finora
- 03 Measurements-System2-Waleed-AltalabiDocumento36 pagine03 Measurements-System2-Waleed-AltalabimohammedNessuna valutazione finora
- By Dr.A.Tharakeshwar Professor in SOM, MIT-WPUDocumento72 pagineBy Dr.A.Tharakeshwar Professor in SOM, MIT-WPURavindra PawarkarNessuna valutazione finora
- Hydraulic ComponentsDocumento65 pagineHydraulic ComponentsVipul SharmaNessuna valutazione finora
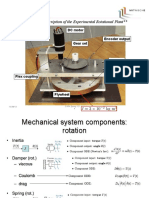
- Rotational Plant: Read The Description of The Experimental Rotational PlantDocumento19 pagineRotational Plant: Read The Description of The Experimental Rotational PlantSatria WibowoNessuna valutazione finora
- Active: Untuk Pengelasan Dengan Menggunakan Las Listrik, Lakukan Langkah-Langkah Di Bawah IniDocumento2 pagineActive: Untuk Pengelasan Dengan Menggunakan Las Listrik, Lakukan Langkah-Langkah Di Bawah IniWanda KurniawanNessuna valutazione finora
- Module-3 ComparatorsDocumento41 pagineModule-3 ComparatorsonemillionsubinNessuna valutazione finora
- Lecture1 IndexNotationDocumento22 pagineLecture1 IndexNotationRishav RajNessuna valutazione finora
- Jee+main+2021 +physics+most+important+topicsDocumento26 pagineJee+main+2021 +physics+most+important+topicsHarsh ShahNessuna valutazione finora
- Breakout - Wave EquationDocumento57 pagineBreakout - Wave EquationRahul SarafNessuna valutazione finora
- W85-089-000A0 DR - Max 7000 Series Maintenance ManualDocumento119 pagineW85-089-000A0 DR - Max 7000 Series Maintenance ManualKiên Sơn NguyễnNessuna valutazione finora
- Nguyen Dai Duo NGDocumento7 pagineNguyen Dai Duo NGtuan leNessuna valutazione finora
- Decurl Unit DU5020 Machine Code: D727 Field Service Manual Ver 1.00Documento42 pagineDecurl Unit DU5020 Machine Code: D727 Field Service Manual Ver 1.00william lozadaNessuna valutazione finora
- LG bs254 bx254 bx324 PDFDocumento86 pagineLG bs254 bx254 bx324 PDFinfologicalNessuna valutazione finora
- Irjet V9i3271Documento4 pagineIrjet V9i3271scdindar3838Nessuna valutazione finora
- Class 3 AC MotorDocumento81 pagineClass 3 AC Motorthuongthoi6223Nessuna valutazione finora
- Power Plant: Capitol University College of EngineeringDocumento10 paginePower Plant: Capitol University College of EngineeringRoland Ayop QuiaoNessuna valutazione finora
- 2017 495 Hes en KBDocumento4 pagine2017 495 Hes en KBMarcelo Lima SouzaNessuna valutazione finora
- Project2-Dynamic Shelving SytemDocumento39 pagineProject2-Dynamic Shelving SytemEsmael EhabNessuna valutazione finora
- Book of Knowledge by Steve RobertsDocumento234 pagineBook of Knowledge by Steve RobertsHardy77Nessuna valutazione finora
- Mercedes 722.9Documento56 pagineMercedes 722.9psuguy100% (2)
- Misalignment SwitchDocumento4 pagineMisalignment SwitchAdeeti BorkarNessuna valutazione finora
- Lect 1 19EEE111 Introduction PartBDocumento34 pagineLect 1 19EEE111 Introduction PartBDenifer DeepNessuna valutazione finora
- Load - Frequency Control (Automatic Generation Control) : Chapter-1Documento19 pagineLoad - Frequency Control (Automatic Generation Control) : Chapter-1BhanuNessuna valutazione finora
- Basic ElectronicsDocumento45 pagineBasic Electronicsrakeshtembhurne17Nessuna valutazione finora
- 2.6 Rotational Mechanical Systems: - Develop Transfer Functions UsingDocumento4 pagine2.6 Rotational Mechanical Systems: - Develop Transfer Functions UsingNickNessuna valutazione finora
- 1 2 5 A Vex MechanicalsystemefficiencyDocumento6 pagine1 2 5 A Vex Mechanicalsystemefficiencyapi-264258719Nessuna valutazione finora
- Week 1.1-Kinematics of ParticlesDocumento26 pagineWeek 1.1-Kinematics of ParticlesТанат СарсеновNessuna valutazione finora
- Mec623 Scotch Yoke Technical ReportDocumento39 pagineMec623 Scotch Yoke Technical ReportAhmad AfieszNessuna valutazione finora
- L15 Electrical Measuring InstrumentsDocumento16 pagineL15 Electrical Measuring Instrumentsprateek2310Nessuna valutazione finora
- Introduction To ACS880Documento91 pagineIntroduction To ACS880jagdish choudharyNessuna valutazione finora
- Energy Overview Energy ValveDocumento45 pagineEnergy Overview Energy ValveEpsoniaBasraNessuna valutazione finora
- Experiment No. 1 Introduction To MultisimDocumento23 pagineExperiment No. 1 Introduction To MultisimLynndon VillamorNessuna valutazione finora
- 1 2 5aMechanicalSystemEfficiencyDocumento7 pagine1 2 5aMechanicalSystemEfficiencyArtNessuna valutazione finora
- Lab 3 and 4Documento10 pagineLab 3 and 4SARANG ABBASINessuna valutazione finora
- UNIT-II - 2.servo, Hydraulics and PneumaticsDocumento33 pagineUNIT-II - 2.servo, Hydraulics and PneumaticsSgsksbskxvxk100% (1)
- ELC Work DescriptionDocumento36 pagineELC Work DescriptionHari100% (1)
- V04 - C03 - Andina Ball Mill Op Manual - 3BHS235454 - EN - Rev - CertDocumento115 pagineV04 - C03 - Andina Ball Mill Op Manual - 3BHS235454 - EN - Rev - CertJuan100% (1)
- DEA 288 Ionic Test InstrumentDocumento20 pagineDEA 288 Ionic Test InstrumentUnknownNessuna valutazione finora
- Project PlanDocumento1 paginaProject Planاسعد الماوريNessuna valutazione finora
- Project Management Assignment - Aung Pyae PhyoDocumento7 pagineProject Management Assignment - Aung Pyae PhyoKavan Ag100% (2)
- Minor Project 7th SemDocumento37 pagineMinor Project 7th SemShoes KustomNessuna valutazione finora
- Lecture 02 - DistillationDocumento113 pagineLecture 02 - DistillationJorge Enciso AcuñaNessuna valutazione finora
- ProductOverview 2023 EN-39Documento1 paginaProductOverview 2023 EN-39Ismail AliNessuna valutazione finora
- Minor ProjectDocumento12 pagineMinor ProjectKaran SahNessuna valutazione finora
- MechatronicsDocumento36 pagineMechatronicsKarthikeyan NedunchezhianNessuna valutazione finora
- CNC Machine Tools and Control SystemsDocumento39 pagineCNC Machine Tools and Control Systemsp_a_jeevaNessuna valutazione finora
- Unconventional Manufacturing ProcessesDocumento8 pagineUnconventional Manufacturing ProcessestfortazNessuna valutazione finora
- CmsDocumento16 pagineCmsKarthikeyan NedunchezhianNessuna valutazione finora
- PowerDocumento31 paginePowerVignesh SekarNessuna valutazione finora
- M5 Part 3b Air Brake System-1Documento38 pagineM5 Part 3b Air Brake System-1Guan YuuuNessuna valutazione finora
- Ix Astronic Lite BlockdiagramDocumento26 pagineIx Astronic Lite BlockdiagramBranko AndricNessuna valutazione finora
- VP 226 012 SK 001Documento2 pagineVP 226 012 SK 001ritoh8657Nessuna valutazione finora
- Quo GCMDocumento11 pagineQuo GCMcost_engineerNessuna valutazione finora
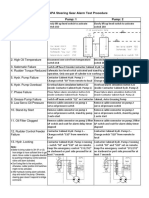
- 10K Ships - Steering Gear Alarm Test ProcedureDocumento3 pagine10K Ships - Steering Gear Alarm Test ProcedureDhammika AbeysinghaNessuna valutazione finora
- Hand Tools AMTDocumento102 pagineHand Tools AMTboomscud33Nessuna valutazione finora
- FY Equipments & ToolsDocumento1 paginaFY Equipments & ToolsAli AliNessuna valutazione finora
- IOM Pneumatic ActuatorsDocumento15 pagineIOM Pneumatic Actuatorskylealamango100% (1)
- Group 3 Tests and Adjustments: 1. Clutch Cut-Off Pressure Switch TestDocumento4 pagineGroup 3 Tests and Adjustments: 1. Clutch Cut-Off Pressure Switch TestREMZONANessuna valutazione finora
- Ingersoll 2008 Pak Promo USDocumento12 pagineIngersoll 2008 Pak Promo USLegend211Nessuna valutazione finora
- JSGW Price List2017 18 PDFDocumento168 pagineJSGW Price List2017 18 PDFJLC PCBNessuna valutazione finora
- A Simple Alternative To Keyed Hubs - No More TorchesDocumento14 pagineA Simple Alternative To Keyed Hubs - No More TorchesMC ANessuna valutazione finora
- Electrolux Hermetic Compressors - R600A LBP VOLTAGE 220-240/1/50Documento2 pagineElectrolux Hermetic Compressors - R600A LBP VOLTAGE 220-240/1/50Ahmed RedaNessuna valutazione finora
- ME Lab ReportingDocumento42 pagineME Lab ReportingJustino BalaneNessuna valutazione finora
- Center LatheDocumento33 pagineCenter LathejohnNessuna valutazione finora
- Catalogue For C6236 PDFDocumento2 pagineCatalogue For C6236 PDFSomasekhar Koushik AyalasomayajulaNessuna valutazione finora
- Canon PC Boklet Trimmer d1Documento67 pagineCanon PC Boklet Trimmer d1ralf1k1hlerNessuna valutazione finora
- USED ON 3", 3-1/2" and 4" Pipes: Tolerance NotesDocumento1 paginaUSED ON 3", 3-1/2" and 4" Pipes: Tolerance NotesEvgeni GenkovNessuna valutazione finora
- Jigs and FixturesDocumento85 pagineJigs and Fixturespatel ketan80% (15)
- Dormer Pramet Drill TroubleshootingDocumento4 pagineDormer Pramet Drill TroubleshootingOmkar KshirsagarNessuna valutazione finora
- Granberg Precision Grinder G1012XT ManualDocumento2 pagineGranberg Precision Grinder G1012XT ManualAnonymous GtkD9AEJqeNessuna valutazione finora
- Ian Kirby Marking ToolsDocumento6 pagineIan Kirby Marking ToolsGiovanni Cenci100% (1)
- Soal Ulangan Mid Semester Ganjil TAHUN PELAJARAN 2010 / 2011Documento2 pagineSoal Ulangan Mid Semester Ganjil TAHUN PELAJARAN 2010 / 2011dianaNessuna valutazione finora
- Page48low ResSRI 2014 - Nov PDFDocumento1 paginaPage48low ResSRI 2014 - Nov PDFSk NgNessuna valutazione finora
- DYNISCO P/N 200100: Transducer Mounting Hole Cleaning Tool KitDocumento2 pagineDYNISCO P/N 200100: Transducer Mounting Hole Cleaning Tool KitalexsandrNessuna valutazione finora
- Inclined PlanesDocumento5 pagineInclined PlanesGrace BruanNessuna valutazione finora
- MauserDocumento14 pagineMauseradamhome100% (1)
- SRi PRO Devilbiss Small GunDocumento1 paginaSRi PRO Devilbiss Small GunLuís GuerreiroNessuna valutazione finora
- 639a856840162 76924dBO Pengumuman 157829 1Documento57 pagine639a856840162 76924dBO Pengumuman 157829 1Vebyanto TjhinNessuna valutazione finora