Potrebbero piacerti anche
- Stone Paper (Calcium Carbonate) : Iran Small Industries and Industrial Towns OrganizationsDocumento32 pagineStone Paper (Calcium Carbonate) : Iran Small Industries and Industrial Towns OrganizationsRAIEL ALVARO100% (2)
- Heat Treatment ManualDocumento29 pagineHeat Treatment ManualAlexis Williams100% (1)
- 500Mw BHEL-KWU Erection ManualDocumento127 pagine500Mw BHEL-KWU Erection ManualRajagopal GanapathyNessuna valutazione finora
- 500MW Turbine O&M Manual Part#1of3Documento170 pagine500MW Turbine O&M Manual Part#1of3Lakshmi Narayan100% (1)
- Samsung MH080FXCA4A Service ManualDocumento108 pagineSamsung MH080FXCA4A Service ManualKYAW SAN OO100% (5)
- Steam TurbinesDocumento45 pagineSteam TurbinesHaseeb Bokhari100% (1)
- ST - MaintenanceDocumento26 pagineST - MaintenanceHayderr HassNessuna valutazione finora
- Steam TurbineDocumento26 pagineSteam TurbineYudha Simbolon100% (1)
- Generator ProtectionDocumento24 pagineGenerator ProtectionSantoshkumar Gupta100% (1)
- ABG PresentationDocumento28 pagineABG PresentationSarah Frazier0% (1)
- Animated Soot BlowerDocumento15 pagineAnimated Soot BlowerPrudhvi RajNessuna valutazione finora
- Turbine Working & ItsComponentsDocumento88 pagineTurbine Working & ItsComponentsHimanshu spoliaNessuna valutazione finora
- Trip Analysis Recommendation For The FY 2020-21 (660 MW Units)Documento45 pagineTrip Analysis Recommendation For The FY 2020-21 (660 MW Units)sudhakarautomatic9940Nessuna valutazione finora
- Soot BlowerDocumento6 pagineSoot BlowerSamNessuna valutazione finora
- 2 Telemetry TurbineDocumento12 pagine2 Telemetry TurbineSamNessuna valutazione finora
- Hydrastep & Hydratect: Water/steam Monitoring SystemsDocumento8 pagineHydrastep & Hydratect: Water/steam Monitoring Systemsगुंजन सिन्हाNessuna valutazione finora
- Turbine Protection & InterlockDocumento7 pagineTurbine Protection & InterlockSony RamaNessuna valutazione finora
- PGPTPT SyllabusDocumento31 paginePGPTPT Syllabussatish20ntrNessuna valutazione finora
- Thermal Power PlantDocumento33 pagineThermal Power PlantManoj KumarNessuna valutazione finora
- Steam Turbine Cycle: Turbine Cycle, Heat Balance Concept, Thermal Efficiency & PG TestDocumento10 pagineSteam Turbine Cycle: Turbine Cycle, Heat Balance Concept, Thermal Efficiency & PG TestAakash RanjanNessuna valutazione finora
- Bhel Horn Drop TestDocumento4 pagineBhel Horn Drop Testarindam misra8Nessuna valutazione finora
- BCP Installation & CommissioningDocumento18 pagineBCP Installation & CommissioningKrishnan SanthanarajNessuna valutazione finora
- Sesi-Tspl-Opn-Sop-Btg-001 (Idf)Documento14 pagineSesi-Tspl-Opn-Sop-Btg-001 (Idf)shubham vermaNessuna valutazione finora
- Engineering Declaration Unit # 2 JindalDocumento16 pagineEngineering Declaration Unit # 2 JindalVIBHAV100% (1)
- Generator 525mw MeilDocumento132 pagineGenerator 525mw MeilRaja VigneshNessuna valutazione finora
- NTPC Safety PolicyDocumento15 pagineNTPC Safety PolicySamNessuna valutazione finora
- L-05 Critical Activities Anp-2Documento11 pagineL-05 Critical Activities Anp-2SamNessuna valutazione finora
- Chapter 12Documento12 pagineChapter 12bhaskarNessuna valutazione finora
- LR Soot Blow PDFDocumento35 pagineLR Soot Blow PDFvtbk100% (1)
- Boiler Emergency Control ProcedureDocumento34 pagineBoiler Emergency Control ProcedureAshish LanjewarNessuna valutazione finora
- Gen-Seal&cool-New - 500 MWDocumento98 pagineGen-Seal&cool-New - 500 MWharisankar100% (2)
- Steam Turbine Jacking Oil SystemDocumento6 pagineSteam Turbine Jacking Oil SystemAli Hegaig100% (1)
- Stator Water System Monitoring For Large Turbo-Generator-A User'S PerspectiveDocumento12 pagineStator Water System Monitoring For Large Turbo-Generator-A User'S PerspectiveUmesh HadiyaNessuna valutazione finora
- Protection & InterlocksDocumento18 pagineProtection & InterlocksSanjay GuptaNessuna valutazione finora
- Fuel Oil System NewDocumento47 pagineFuel Oil System NewBrijraj PandeyNessuna valutazione finora
- Ball and Race Mill PDFDocumento76 pagineBall and Race Mill PDFNemoNessuna valutazione finora
- 2 X 115 TPH CFBC Boiler: Ultratech Cement Limited - Apcw TadipatriDocumento51 pagine2 X 115 TPH CFBC Boiler: Ultratech Cement Limited - Apcw TadipatriChanna BasavaNessuna valutazione finora
- Boiler ConstructionDocumento4 pagineBoiler ConstructionrpshvjuNessuna valutazione finora
- BasicsDocumento23 pagineBasicsSam100% (1)
- Power Plant ShortcutsDocumento21 paginePower Plant ShortcutsabcNessuna valutazione finora
- Boiler Notes 2Documento42 pagineBoiler Notes 2Balakrishnan KannanNessuna valutazione finora
- Cold Startup Procedure 250 MWDocumento7 pagineCold Startup Procedure 250 MWPrudhvi RajNessuna valutazione finora
- Generator CoolingDocumento7 pagineGenerator CoolingPrudhvi RajNessuna valutazione finora
- R&i - Generator, GT, UatDocumento46 pagineR&i - Generator, GT, UatPradeep SinghNessuna valutazione finora
- FD FanDocumento5 pagineFD FanPrudhvi RajNessuna valutazione finora
- 300 MW DCRTPP Boiler O&M ManualDocumento112 pagine300 MW DCRTPP Boiler O&M ManualpntripathiNessuna valutazione finora
- FD ID Logic System Gyanendra Sharma NPTI DelhiDocumento40 pagineFD ID Logic System Gyanendra Sharma NPTI DelhiNPTINessuna valutazione finora
- Mill Reject SystemDocumento22 pagineMill Reject SystemgangatharanNessuna valutazione finora
- Technical Diary TurbineDocumento29 pagineTechnical Diary TurbineDurjoy Chakraborty100% (1)
- SOP TG Rolling and SynchronisationDocumento13 pagineSOP TG Rolling and Synchronisationmoovendan pNessuna valutazione finora
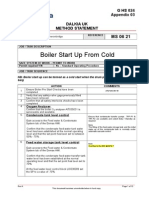
- MS 06 21 - Boiler Startup Frim Cold (Rev A - 03.01.12)Documento12 pagineMS 06 21 - Boiler Startup Frim Cold (Rev A - 03.01.12)Prakash WarrierNessuna valutazione finora
- To System & Barring GearDocumento22 pagineTo System & Barring GearPrudhvi RajNessuna valutazione finora
- Fans SoftDocumento291 pagineFans SoftAmitava PalNessuna valutazione finora
- Electromatic Relief Valve TYPE 1525 VX: Bharat Heavy Electricals Limited TiruchirapalliDocumento31 pagineElectromatic Relief Valve TYPE 1525 VX: Bharat Heavy Electricals Limited TiruchirapalliDenkaNessuna valutazione finora
- Generator Protection Unit#3 KMPCLDocumento15 pagineGenerator Protection Unit#3 KMPCLAmaresh NayakNessuna valutazione finora
- Chapter 14 Governing SystemDocumento7 pagineChapter 14 Governing Systemsambhu100% (1)
- 10 - Bus Transfer System Retroffiting - Concept NoteDocumento9 pagine10 - Bus Transfer System Retroffiting - Concept Notevitthal01Nessuna valutazione finora
- Generator Seal Oil System-X9000067EDocumento24 pagineGenerator Seal Oil System-X9000067EOry'sSebayang100% (1)
- 07 Tur Gov - STDDocumento62 pagine07 Tur Gov - STDgautamntpc100% (2)
- Turbine Issues ResolutionDocumento34 pagineTurbine Issues Resolutionraj3850% (2)
- Final AOH Report - TMD 060818Documento15 pagineFinal AOH Report - TMD 060818sanmukhaNessuna valutazione finora
- Chapter 10 LatestDocumento43 pagineChapter 10 LatestskdfNessuna valutazione finora
- WSN 91 2018 31 43Documento13 pagineWSN 91 2018 31 43jerome okoyeNessuna valutazione finora
- Condition Monitoring and Condition Based Maintenance (CBM)Documento9 pagineCondition Monitoring and Condition Based Maintenance (CBM)jaggy elgarNessuna valutazione finora
- DSH CatalogueDocumento20 pagineDSH Catalogueनिखिल बायवारNessuna valutazione finora
- CRHsteamforsootblowing PDFDocumento9 pagineCRHsteamforsootblowing PDFUdhayakumar VenkataramanNessuna valutazione finora
- 500mwboilermahagenco 140115124304 Phpapp02Documento38 pagine500mwboilermahagenco 140115124304 Phpapp02Lakshmi NarayanNessuna valutazione finora
- HPBP Writeup Dadri-IIDocumento17 pagineHPBP Writeup Dadri-IIrajan_me083Nessuna valutazione finora
- Revised Boiler Start Up Procedure For 500 MW BHEL Make UnitsDocumento22 pagineRevised Boiler Start Up Procedure For 500 MW BHEL Make Unitsnetygen1Nessuna valutazione finora
- Guidelines For House Load OperationDocumento5 pagineGuidelines For House Load OperationLakshmi NarayanNessuna valutazione finora
- Investigation of Unburned Carbon Particles in y Ash by Means of Laser Light ScatteringDocumento10 pagineInvestigation of Unburned Carbon Particles in y Ash by Means of Laser Light ScatteringLakshmi NarayanNessuna valutazione finora
- Power Plant and Calculations: Danfoss High Pressure PumpsDocumento6 paginePower Plant and Calculations: Danfoss High Pressure PumpsLakshmi NarayanNessuna valutazione finora
- Syllabus Business CommerceDocumento101 pagineSyllabus Business CommerceLakshmi Narayan100% (1)
- BYJUS IAS Explained 3 Farm LawsDocumento18 pagineBYJUS IAS Explained 3 Farm LawsLakshmi NarayanNessuna valutazione finora
- Brochure Coal Based Power Plants November2014Documento4 pagineBrochure Coal Based Power Plants November2014RajnirathoreNessuna valutazione finora
- Syllabus Business CommerceDocumento101 pagineSyllabus Business CommerceLakshmi Narayan100% (1)
- Boiler ControlsDocumento27 pagineBoiler ControlsMY NAME IS NEERAJ..:):)Nessuna valutazione finora
- CRHsteamforsootblowing PDFDocumento9 pagineCRHsteamforsootblowing PDFUdhayakumar VenkataramanNessuna valutazione finora
- CERC Deviation Settlement Mechanism and Related Matters Regulations 2014Documento33 pagineCERC Deviation Settlement Mechanism and Related Matters Regulations 2014Lakshmi NarayanNessuna valutazione finora
- Flexible Operation in Coal Based Plant: By-SNEHESH BANERJEE, Operation Services, CCDocumento27 pagineFlexible Operation in Coal Based Plant: By-SNEHESH BANERJEE, Operation Services, CCLakshmi NarayanNessuna valutazione finora
- Cold StartupDocumento12 pagineCold StartupLakshmi NarayanNessuna valutazione finora
- 07 - Combustion - Optimisation PDFDocumento90 pagine07 - Combustion - Optimisation PDFLakshmi NarayanNessuna valutazione finora
- CBD - Vent Sizing CalculationDocumento1 paginaCBD - Vent Sizing CalculationLakshmi NarayanNessuna valutazione finora
- 551 PDFDocumento2 pagine551 PDFindiaNessuna valutazione finora
- AziDocumento2 pagineAziReginNessuna valutazione finora
- 02 - BTF - Customer - TRG - 230911 PDFDocumento110 pagine02 - BTF - Customer - TRG - 230911 PDFLakshmi Narayan100% (2)
- 07 - STLD-Final PDFDocumento35 pagine07 - STLD-Final PDFLakshmi Narayan0% (1)
- 05 - WELD REPAIR PROCEDURES of BOILER COMPONENTS PDFDocumento165 pagine05 - WELD REPAIR PROCEDURES of BOILER COMPONENTS PDFLakshmi Narayan100% (2)
- 06 - Water - Tech - Revision - PrintDocumento58 pagine06 - Water - Tech - Revision - PrintLakshmi NarayanNessuna valutazione finora
- 04 - FFS - TRG - SC2 PDFDocumento65 pagine04 - FFS - TRG - SC2 PDFLakshmi NarayanNessuna valutazione finora
- 08 - Erosion Protection Measu 210911Documento12 pagine08 - Erosion Protection Measu 210911Lakshmi NarayanNessuna valutazione finora
- Maxiforce CatalogDocumento525 pagineMaxiforce CatalogVenzon SotNessuna valutazione finora
- 825 Series 190CC Motor BriggsDocumento27 pagine825 Series 190CC Motor BriggsCTRL ENGENHARIA E MANUTENÇÃO ComprasNessuna valutazione finora
- LAB 4: Three-Phase Uncontrolled Rectifier With PSIM Larning ObjectivesDocumento7 pagineLAB 4: Three-Phase Uncontrolled Rectifier With PSIM Larning ObjectivesMO 'Nessuna valutazione finora
- CTR-12 - FPSO Firenze - MODULE LIST r.1Documento2 pagineCTR-12 - FPSO Firenze - MODULE LIST r.1SriNessuna valutazione finora
- Unit - Ii Switching TransientsDocumento42 pagineUnit - Ii Switching Transientsshree100% (5)
- Deforestation and Its Effects On The EnvironmentDocumento3 pagineDeforestation and Its Effects On The EnvironmentwhmzahNessuna valutazione finora
- Mcap31122023 0Documento100 pagineMcap31122023 0Arun DSINessuna valutazione finora
- Concrete Pipe HandbookDocumento62 pagineConcrete Pipe HandbookDavid100% (1)
- Waterjet 2008 CondensedDocumento12 pagineWaterjet 2008 Condensedkaniappan sakthivelNessuna valutazione finora
- Think WoodDocumento10 pagineThink WoodkusumoajiNessuna valutazione finora
- Fundamentals of Engineering Thermodynamics (Solutions Manual) (M. J. Moran & H. N. Shapiro)Documento451 pagineFundamentals of Engineering Thermodynamics (Solutions Manual) (M. J. Moran & H. N. Shapiro)eltytanNessuna valutazione finora
- TM 1-1520-256-23 PDFDocumento522 pagineTM 1-1520-256-23 PDFEagle1968100% (1)
- Hazardous Area Classification: Codes of Practice and StandardsDocumento13 pagineHazardous Area Classification: Codes of Practice and StandardsborrowmanaNessuna valutazione finora
- PB PDFDocumento95 paginePB PDFMisha KulibaevNessuna valutazione finora
- EPIV ValvesDocumento2 pagineEPIV ValvesstomakosNessuna valutazione finora
- Techno-Economic Comparison of 100% Renewable Urea Production ProcessesDocumento15 pagineTechno-Economic Comparison of 100% Renewable Urea Production ProcessesNestor TamayoNessuna valutazione finora
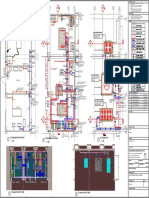
- HPCL-02 - Hvac Piping LayoutDocumento1 paginaHPCL-02 - Hvac Piping LayoutBN YADAVNessuna valutazione finora
- KAT0815-0001-E Single Pole Insulated Conductor RailDocumento36 pagineKAT0815-0001-E Single Pole Insulated Conductor RailirinaNessuna valutazione finora
- Hysys 2Documento85 pagineHysys 2Erick SaLaNessuna valutazione finora
- Full Product Line Catalogue 2018 2270Documento232 pagineFull Product Line Catalogue 2018 2270kingreadyNessuna valutazione finora
- Always The Right Fuse-LinkDocumento38 pagineAlways The Right Fuse-Linke_NomadNessuna valutazione finora
- Datasheet Differential Pressure Sensor SDP1108 SDP2108Documento7 pagineDatasheet Differential Pressure Sensor SDP1108 SDP2108jaijadduNessuna valutazione finora
- Air Insulated Ring Main Unit:, United KingdomDocumento4 pagineAir Insulated Ring Main Unit:, United KingdomAyan BanerjeeNessuna valutazione finora
- Synchronous Machines Question BankDocumento10 pagineSynchronous Machines Question BankelecenggNessuna valutazione finora
- Design and Fabrication of Oil Skimmer RobotDocumento46 pagineDesign and Fabrication of Oil Skimmer RobotSathiya Udumalpet100% (2)
- Ott 999 0063 17 00Documento9 pagineOtt 999 0063 17 00cristidonaNessuna valutazione finora
- Siemens IEC61850Documento2 pagineSiemens IEC61850g-bearNessuna valutazione finora
- Ew Blast Powercore 4000K 21degree SpecSheetDocumento2 pagineEw Blast Powercore 4000K 21degree SpecSheetsanguinaria123Nessuna valutazione finora