Potrebbero piacerti anche
- Geometric functions in computer aided geometric designDa EverandGeometric functions in computer aided geometric designNessuna valutazione finora
- Chapter 16Documento110 pagineChapter 16api-3698788Nessuna valutazione finora
- Chapter 1-992Documento12 pagineChapter 1-992Subhan, MScNessuna valutazione finora
- Dynamic Analysis Using FeaDocumento114 pagineDynamic Analysis Using FeaDr P Ravinder ReddyNessuna valutazione finora
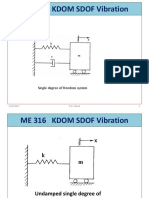
- #9 Kdom Sdof VibrationDocumento59 pagine#9 Kdom Sdof VibrationJolly VargheseNessuna valutazione finora
- MathReview PDFDocumento182 pagineMathReview PDFfnjdfvpsNessuna valutazione finora
- Modelo Varios Grados LibertadDocumento4 pagineModelo Varios Grados LibertadPedRo CulquipomaNessuna valutazione finora
- Dynamic Analysis: T F KX X C X MDocumento9 pagineDynamic Analysis: T F KX X C X MRed JohnNessuna valutazione finora
- PT 1 Limits and ContinuityDocumento2 paginePT 1 Limits and ContinuityChristine EvangelistaNessuna valutazione finora
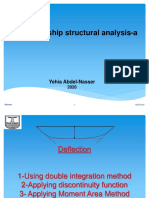
- Deflection L (4,5)Documento35 pagineDeflection L (4,5)IbrahimAzabNessuna valutazione finora
- Lec21 Dimension2 PDFDocumento9 pagineLec21 Dimension2 PDFR. DeshmukhNessuna valutazione finora
- #1 - Kdom Mechanisms Part1Documento55 pagine#1 - Kdom Mechanisms Part1Mudit BothraNessuna valutazione finora
- Reinforced Concrete Basics of Design PDFDocumento45 pagineReinforced Concrete Basics of Design PDFJorge Mauricio de SouzaNessuna valutazione finora
- Bloom Filters: ReferencesDocumento22 pagineBloom Filters: ReferencesRamprasad BanothuNessuna valutazione finora
- Numerical Measures of Variability: Fall 2016-2017 MGT 205 1Documento19 pagineNumerical Measures of Variability: Fall 2016-2017 MGT 205 1Mobasher MessiNessuna valutazione finora
- Ch5 Multivariate MethodsDocumento26 pagineCh5 Multivariate MethodsRikiNessuna valutazione finora
- Chapter 2: Derivatives: by Assoc - Prof. Mai Duc ThanhDocumento19 pagineChapter 2: Derivatives: by Assoc - Prof. Mai Duc ThanhTriet TruongNessuna valutazione finora
- Storage Space and Computational Time, If RequiredDocumento3 pagineStorage Space and Computational Time, If RequiredSaiNessuna valutazione finora
- CoursDocumento66 pagineCoursRedouane RedaNessuna valutazione finora
- Application of Four Probability Distributions For Wind SpeedDocumento6 pagineApplication of Four Probability Distributions For Wind SpeedEric ChienNessuna valutazione finora
- C41 - Integrals - Part 1Documento45 pagineC41 - Integrals - Part 1Triet TruongNessuna valutazione finora
- Linear Models For Portfolio OptimizationDocumento28 pagineLinear Models For Portfolio Optimizationshoesize7Nessuna valutazione finora
- Topics in Ship Structural Design: Lecture 5 Buckling and Ultimate Strength of PlatesDocumento57 pagineTopics in Ship Structural Design: Lecture 5 Buckling and Ultimate Strength of Platesricardi aryo bimoNessuna valutazione finora
- Static 40Documento4 pagineStatic 40Essenam GOLINessuna valutazione finora
- EngAn3 CFD 2013 14 Lect - 6Documento28 pagineEngAn3 CFD 2013 14 Lect - 6raphael.sanchesNessuna valutazione finora
- New Trends in Exact Algorithms For The 0 PDFDocumento8 pagineNew Trends in Exact Algorithms For The 0 PDFDavid SaccoNessuna valutazione finora
- The Force Method For Analysis of Staticaly Indeterminate StructuresDocumento44 pagineThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24Nessuna valutazione finora
- Chapter 1 NewDocumento26 pagineChapter 1 NewRaees SwatiNessuna valutazione finora
- AlainandguidoDocumento16 pagineAlainandguidoneeraj singhNessuna valutazione finora
- Gradient Descent Ascent For Minimax ProblemsDocumento22 pagineGradient Descent Ascent For Minimax Problemstengchi xieNessuna valutazione finora
- MEH - Kuliah Ke-3Documento83 pagineMEH - Kuliah Ke-3luluthNessuna valutazione finora
- BSI 231-Differential Equations: Solution of Non-Homogenous Linear Higher Differential EquationDocumento9 pagineBSI 231-Differential Equations: Solution of Non-Homogenous Linear Higher Differential EquationKhan SaibNessuna valutazione finora
- I2ml3e Chap5Documento26 pagineI2ml3e Chap5EMS Metalworking MachineryNessuna valutazione finora
- TO Machine Learning: Lecture Slides ForDocumento28 pagineTO Machine Learning: Lecture Slides Forvarun3dec1Nessuna valutazione finora
- Chapter 4: Part 2 Techniques of Integration: by Assoc - Prof. Mai Duc ThanhDocumento31 pagineChapter 4: Part 2 Techniques of Integration: by Assoc - Prof. Mai Duc ThanhTriet TruongNessuna valutazione finora
- إعادة تأهيل الجسر الثالث في الموصلDocumento7 pagineإعادة تأهيل الجسر الثالث في الموصلMhnd Al-SherrawiNessuna valutazione finora
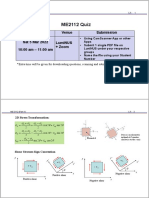
- ME2112 - (Part 1) - 2D Stress and Strain-L3Documento9 pagineME2112 - (Part 1) - 2D Stress and Strain-L3dinodanoNessuna valutazione finora
- Geotechnical Elements and Models in Opensees: Pedro ArduinoDocumento16 pagineGeotechnical Elements and Models in Opensees: Pedro ArduinoWail Omer HassanNessuna valutazione finora
- Post-Optimality Analysis in Bounded Variables ProbDocumento19 paginePost-Optimality Analysis in Bounded Variables ProbMeheratu Tagese MeheratuNessuna valutazione finora
- I2ml3e Chap8Documento28 pagineI2ml3e Chap8EMS Metalworking MachineryNessuna valutazione finora
- L1L2 Sem2 2023.24Documento37 pagineL1L2 Sem2 2023.24Farahin RdznNessuna valutazione finora
- MIT2 092F09 hw6 PDFDocumento3 pagineMIT2 092F09 hw6 PDFDanielNessuna valutazione finora
- MIT18 05S14 Class5slides PDFDocumento17 pagineMIT18 05S14 Class5slides PDFAftab SaadNessuna valutazione finora
- FluctHydro HandoutDocumento78 pagineFluctHydro HandoutSayantik DalalNessuna valutazione finora
- Cluster Analysis: Concepts and Techniques - Chapter 7Documento60 pagineCluster Analysis: Concepts and Techniques - Chapter 7Suchithra SalilanNessuna valutazione finora
- Structural Analysis 3 & 3A: Third Year Civil CVG311 & CVS311 Lecture No. 2Documento75 pagineStructural Analysis 3 & 3A: Third Year Civil CVG311 & CVS311 Lecture No. 2mohamedNessuna valutazione finora
- Intermediate R - Principal Component AnalysisDocumento8 pagineIntermediate R - Principal Component AnalysisVivay SalazarNessuna valutazione finora
- Lec 11: Linear Dimensionality Reduction: 11.33.1 Minimizing VarianceDocumento3 pagineLec 11: Linear Dimensionality Reduction: 11.33.1 Minimizing VarianceshreNessuna valutazione finora
- 14.thermal StressesDocumento56 pagine14.thermal StressesAleksa MarjanovićNessuna valutazione finora
- Proceedings of The 15th International Conference of The International Association For Computer Methods and Advances in GeomechanicsDocumento8 pagineProceedings of The 15th International Conference of The International Association For Computer Methods and Advances in GeomechanicsmkholmyNessuna valutazione finora
- Engineering Mathematics: Differential & Integral Calculus Integral CalculusDocumento22 pagineEngineering Mathematics: Differential & Integral Calculus Integral CalculusIfiok UsoroNessuna valutazione finora
- (Operation Research 1) CC MATH-504C Unit-1-2-3Documento46 pagine(Operation Research 1) CC MATH-504C Unit-1-2-3Nilay JayswalNessuna valutazione finora
- Machine Learning and Data Mining: Introduction to (Học máy và Khai phá dữ liệu)Documento23 pagineMachine Learning and Data Mining: Introduction to (Học máy và Khai phá dữ liệu)Hieu Tien TrinhNessuna valutazione finora
- Math 27 Unit 1.1Documento29 pagineMath 27 Unit 1.1MigaeaNessuna valutazione finora
- Hyperbolic and Inverse FunctionDocumento5 pagineHyperbolic and Inverse FunctionRansu SenpaiNessuna valutazione finora
- Discrete-Time Signals and Systems:) (N X N yDocumento29 pagineDiscrete-Time Signals and Systems:) (N X N yVivien VilladelreyNessuna valutazione finora
- CSE 245: Computer Aided Circuit Simulation and Verification: Nonlinear EquationDocumento51 pagineCSE 245: Computer Aided Circuit Simulation and Verification: Nonlinear EquationAlexandru BadescuNessuna valutazione finora
- Exercise Sheet 4: Semiconductor Nanostructures Thomas Ihn Fall 2017Documento1 paginaExercise Sheet 4: Semiconductor Nanostructures Thomas Ihn Fall 2017ApuNessuna valutazione finora
- Mat435 Chapter 1 Trigonometric IntegralsDocumento6 pagineMat435 Chapter 1 Trigonometric IntegralsNabil MahadzirNessuna valutazione finora
- D1. MDOF UnlockedDocumento3 pagineD1. MDOF UnlockedMohammed Essam ShatnawiNessuna valutazione finora
- Shear LagDocumento35 pagineShear LagMohammed Essam ShatnawiNessuna valutazione finora
- A Finite Element Parametric Study On Block Shear Failure of Steel Tension Members-2004 PDFDocumento21 pagineA Finite Element Parametric Study On Block Shear Failure of Steel Tension Members-2004 PDFMohammed Essam ShatnawiNessuna valutazione finora
- Formulas For Shear Lag Effect of T, I and Box Beams PDFDocumento13 pagineFormulas For Shear Lag Effect of T, I and Box Beams PDFMohammed Essam Shatnawi100% (1)
- Nomogram For Solution of Manning's Equation For Circular Pipes Flowing Full (N 0.013)Documento3 pagineNomogram For Solution of Manning's Equation For Circular Pipes Flowing Full (N 0.013)Mohammed Essam ShatnawiNessuna valutazione finora
- 88 m37Documento8 pagine88 m37Mohammed Essam ShatnawiNessuna valutazione finora
- Block Shear Load Capacity Predictions1994Documento16 pagineBlock Shear Load Capacity Predictions1994Mohammed Essam ShatnawiNessuna valutazione finora
- Fiberstruct Deflection TableDocumento2 pagineFiberstruct Deflection TableMohammed Essam ShatnawiNessuna valutazione finora
- Nomograms PDFDocumento3 pagineNomograms PDFMohammed Essam ShatnawiNessuna valutazione finora
- HW1Documento1 paginaHW1Mohammed Essam ShatnawiNessuna valutazione finora
- Homework 1: Equations of Motion and Free VibrationDocumento1 paginaHomework 1: Equations of Motion and Free VibrationMohammed Essam ShatnawiNessuna valutazione finora
- Dynamic Large Deflection ConfDocumento13 pagineDynamic Large Deflection ConfMohammed Essam ShatnawiNessuna valutazione finora
- Engineering 36: Moment of InertiaDocumento28 pagineEngineering 36: Moment of InertiaMohammed Essam ShatnawiNessuna valutazione finora
- SpeechGeek H.I.-larious Volume 3Documento9 pagineSpeechGeek H.I.-larious Volume 3SpeechGeekNessuna valutazione finora
- Router Board Performance TestsDocumento2 pagineRouter Board Performance TestsedkaviNessuna valutazione finora
- Packet Tracer - VLSM Design and Implementation Practice TopologyDocumento3 paginePacket Tracer - VLSM Design and Implementation Practice TopologyBenj MendozaNessuna valutazione finora
- Ben ChanDocumento2 pagineBen ChanAlibabaNessuna valutazione finora
- Exercises: Use The Correct Form of Verbs in BracketsDocumento3 pagineExercises: Use The Correct Form of Verbs in BracketsThủy NguyễnNessuna valutazione finora
- Technik: RefraDocumento54 pagineTechnik: Reframustaf100% (1)
- Marketing Plan Potato Food TruckDocumento25 pagineMarketing Plan Potato Food TruckAhasan h. ShuvoNessuna valutazione finora
- 3500 Ha027988 7Documento384 pagine3500 Ha027988 7Gigi ZitoNessuna valutazione finora
- Lecture # 3 Introduction To JqueryDocumento88 pagineLecture # 3 Introduction To JqueryDanial AhmadNessuna valutazione finora
- Bird Beak Adaptations: PurposeDocumento9 pagineBird Beak Adaptations: PurposelilazrbNessuna valutazione finora
- LAC BrigadaDocumento6 pagineLAC BrigadaRina Mae LopezNessuna valutazione finora
- 08 BQ - PADSB - Elect - P2 - R2 (Subcon Empty BQ)Documento89 pagine08 BQ - PADSB - Elect - P2 - R2 (Subcon Empty BQ)Middle EastNessuna valutazione finora
- Stock Trak AssignmentDocumento4 pagineStock Trak AssignmentPat ParisiNessuna valutazione finora
- 2.fundamentals of MappingDocumento5 pagine2.fundamentals of MappingB S Praveen BspNessuna valutazione finora
- Caribbean Career Opportunity - Cayman Island Water Authority - Plant Operator Cayman Brac Plant Operator (Overseas)Documento1 paginaCaribbean Career Opportunity - Cayman Island Water Authority - Plant Operator Cayman Brac Plant Operator (Overseas)Cawasa St-LuciaNessuna valutazione finora
- Comparative ApproachDocumento12 pagineComparative ApproachSara WongNessuna valutazione finora
- Honeymoon in Vegas Word FileDocumento3 pagineHoneymoon in Vegas Word FileElenaNessuna valutazione finora
- TV ExplorerDocumento2 pagineTV Explorerdan r.Nessuna valutazione finora
- Materials Science and Engineering-Chapter 11Documento3 pagineMaterials Science and Engineering-Chapter 11JurgenNessuna valutazione finora
- Sri Anjaneya Cotton Mills LimitedDocumento63 pagineSri Anjaneya Cotton Mills LimitedPrashanth PB50% (2)
- Entrance 2021: Indira Gandhi Rashtriya Uran AkademiDocumento2 pagineEntrance 2021: Indira Gandhi Rashtriya Uran Akademird meshramNessuna valutazione finora
- 2002PCDFCADocumento78 pagine2002PCDFCATin NguyenNessuna valutazione finora
- The Little MermaidDocumento6 pagineThe Little MermaidBobbie LittleNessuna valutazione finora
- RCU II Open Protocol Communication Manual FV 9 10 31 08 PDFDocumento17 pagineRCU II Open Protocol Communication Manual FV 9 10 31 08 PDFAndrés ColmenaresNessuna valutazione finora
- Accessing Biodiversity and Sharing The BenefitsDocumento332 pagineAccessing Biodiversity and Sharing The BenefitsNelson MartínezNessuna valutazione finora
- Anilkumar Surendran 3-AdDocumento4 pagineAnilkumar Surendran 3-AdAnil AmbalapuzhaNessuna valutazione finora
- HGP Year End Report 2021-2022 NewDocumento169 pagineHGP Year End Report 2021-2022 Newangelica sungaNessuna valutazione finora
- People Vs CorreaDocumento2 paginePeople Vs CorreaRmLyn Mclnao100% (1)
- Manuall Cryton-Yamaha 2015Documento57 pagineManuall Cryton-Yamaha 2015Abel PachecoNessuna valutazione finora
- Beg 2018 XXDocumento42 pagineBeg 2018 XXFranz Gustavo Vargas MamaniNessuna valutazione finora