Potrebbero piacerti anche
- Main PPT2Documento31 pagineMain PPT2Shanthi KishoreNessuna valutazione finora
- Speed Control of DC Motor Using Pid ControllerDocumento20 pagineSpeed Control of DC Motor Using Pid ControllerBUBUNNessuna valutazione finora
- Chp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - FinalDocumento49 pagineChp6 DC Motor Drives (Uncontrolled and Controlled Rectifier) - Finalblaze emberNessuna valutazione finora
- Speed Control of DC Motor Using Pid Controller BasedDocumento16 pagineSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNessuna valutazione finora
- B51GK 2016Documento6 pagineB51GK 2016sing_rNessuna valutazione finora
- An Introduction To Software ArchitectureDocumento32 pagineAn Introduction To Software Architectureprisci_christaNessuna valutazione finora
- Risk and OpportunityDocumento5 pagineRisk and OpportunityQualityproNessuna valutazione finora
- QUESTION BANK of Control Systems Engineering PDFDocumento12 pagineQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- HVDC TransmissionDocumento16 pagineHVDC TransmissionAritra ChatterjeeNessuna valutazione finora
- Multiple Choices Question1Documento4 pagineMultiple Choices Question1vishnugehlot0% (2)
- Lecture-14 GSC and RSC in Wind Energy SystemsDocumento17 pagineLecture-14 GSC and RSC in Wind Energy SystemsjameelahmadNessuna valutazione finora
- DC Servo Trainer: - Electrical MachineDocumento3 pagineDC Servo Trainer: - Electrical MachineMuaath100% (1)
- Anki A Unified Control Strategy For Three-Phase Inverter PDFDocumento16 pagineAnki A Unified Control Strategy For Three-Phase Inverter PDFRavi KumarNessuna valutazione finora
- Nonlinear Observer DesignDocumento50 pagineNonlinear Observer Designvivek_may12Nessuna valutazione finora
- History of PLCDocumento4 pagineHistory of PLCREyma JOy Solivio Sipat100% (1)
- Homework: ProblemDocumento2 pagineHomework: ProblemReinaldy MaslimNessuna valutazione finora
- Week 5 Bahasa Inggris TeknikDocumento8 pagineWeek 5 Bahasa Inggris Teknikmorning starNessuna valutazione finora
- Transfer Function State Space Representation RLC Circuit Example 2Documento4 pagineTransfer Function State Space Representation RLC Circuit Example 2Latif KebbabiNessuna valutazione finora
- Two and Three-Parameter Weibull Distribution in Available Wind Power AnalysisDocumento15 pagineTwo and Three-Parameter Weibull Distribution in Available Wind Power AnalysisRoajs SofNessuna valutazione finora
- Brochure DEYE Hybride SUN XKDocumento6 pagineBrochure DEYE Hybride SUN XKSINES FranceNessuna valutazione finora
- Analyzing Power Electronics & Control System On Matlab/SimulinkDocumento18 pagineAnalyzing Power Electronics & Control System On Matlab/SimulinkMOHIT JAINNessuna valutazione finora
- Sliding Mode ControlDocumento14 pagineSliding Mode ControlAsghar AliNessuna valutazione finora
- Sliding Mode ControlDocumento16 pagineSliding Mode ControlHoang Ngoc HungNessuna valutazione finora
- Two Marks - UNIT IV - 28.10.2022Documento13 pagineTwo Marks - UNIT IV - 28.10.2022G.L. Jai Purushotham RajNessuna valutazione finora
- PLL - Thesis Final VersionDocumento50 paginePLL - Thesis Final VersionDjameleddine BougrineNessuna valutazione finora
- Lab MachineDocumento9 pagineLab MachineAnonymous ryvoPIDNessuna valutazione finora
- Chapter 9 SensorsDocumento48 pagineChapter 9 Sensorsامجد الغالبيNessuna valutazione finora
- Sliding Mode Control of A Doubly Fed Induction Generator DFIG For Wind Energy Conversion System LibreDocumento9 pagineSliding Mode Control of A Doubly Fed Induction Generator DFIG For Wind Energy Conversion System LibreMahfoudh Ould AbderrahmaneNessuna valutazione finora
- Communication System (123-164)Documento42 pagineCommunication System (123-164)Mupli RajeshNessuna valutazione finora
- Design Considerations For An LLC Resonant ConverterDocumento29 pagineDesign Considerations For An LLC Resonant Converterbacuoc.nguyen356Nessuna valutazione finora
- KUKA KR 16 DatasheetDocumento1 paginaKUKA KR 16 DatasheetMahesh Nvsr BNessuna valutazione finora
- The Magneto Hydrodynamic (MHD) Generator Is A Device That Converts Thermal Energy of A Fuel Into Electrical EnergyDocumento18 pagineThe Magneto Hydrodynamic (MHD) Generator Is A Device That Converts Thermal Energy of A Fuel Into Electrical EnergyNrs ShahNessuna valutazione finora
- Inomax ACS580 VFD User Manual V220Documento112 pagineInomax ACS580 VFD User Manual V220luis castiblanco100% (1)
- Unit-5 Speed Control of Three Phase Induction MotorDocumento16 pagineUnit-5 Speed Control of Three Phase Induction MotorAshok P100% (1)
- Sliding Mode ControlDocumento11 pagineSliding Mode ControlHasbullah AhmadNessuna valutazione finora
- Wireless Fidelity: Technology and ApplicationsDocumento22 pagineWireless Fidelity: Technology and ApplicationsPurboday GhoshNessuna valutazione finora
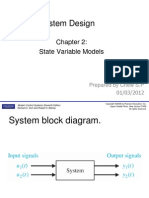
- MCT Unit 2 State Space DesignDocumento92 pagineMCT Unit 2 State Space DesignHarshal Giri100% (1)
- Variable Reluctance Motor (VRM)Documento6 pagineVariable Reluctance Motor (VRM)Revant SharmaNessuna valutazione finora
- Solaire ThermiqueDocumento70 pagineSolaire ThermiqueNOURNessuna valutazione finora
- Modelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDocumento88 pagineModelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDao Van ManhNessuna valutazione finora
- FCS Lab2Documento36 pagineFCS Lab2muhammadNessuna valutazione finora
- Chapter 4 DC Machines FinalDocumento91 pagineChapter 4 DC Machines FinalAbo SoltanNessuna valutazione finora
- 100kw Grid Connected PV ModuleDocumento3 pagine100kw Grid Connected PV ModuleKapil DevNessuna valutazione finora
- Hacheur MCC PDFDocumento42 pagineHacheur MCC PDFskooozaNessuna valutazione finora
- Chapter 12Documento23 pagineChapter 12sachin235Nessuna valutazione finora
- Lecture Notes - Synchronous MachineDocumento14 pagineLecture Notes - Synchronous MachineYuvraj GogoiNessuna valutazione finora
- A Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation SystemsDocumento8 pagineA Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation Systemsankurgoel1975Nessuna valutazione finora
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocumento41 pagine5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNessuna valutazione finora
- Irf An-940Documento5 pagineIrf An-940jamesjunNessuna valutazione finora
- Lagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Documento32 pagineLagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Ribal KhreisNessuna valutazione finora
- Calculation PPT For EnergyDocumento12 pagineCalculation PPT For EnergyMalyaj MishraNessuna valutazione finora
- Wastewater Treatment Plant SCADA ApplicationDocumento6 pagineWastewater Treatment Plant SCADA ApplicationDaniel Elmer Parado SosaNessuna valutazione finora
- G. K. Dubey Chapter-2 (Dynamics of Electric Drives) SolutionsDocumento16 pagineG. K. Dubey Chapter-2 (Dynamics of Electric Drives) SolutionsPriyanshu SinhaNessuna valutazione finora
- Q.1 List Various Type of Systems and Define Them Giving ExampleDocumento6 pagineQ.1 List Various Type of Systems and Define Them Giving ExampleAbhishekNessuna valutazione finora
- OGDCL-Past Papers 2021Documento4 pagineOGDCL-Past Papers 2021Haseeb AhmadNessuna valutazione finora
- Switch Mode ConvertersDocumento28 pagineSwitch Mode ConvertersAniruddh KashyapNessuna valutazione finora
- Principle of Ward Leonard MethodDocumento2 paginePrinciple of Ward Leonard MethodHazizi KhairyNessuna valutazione finora
- 8 - Kinematics of Mobile RobotsDocumento27 pagine8 - Kinematics of Mobile RobotsRAVI KIRAN REDDYNessuna valutazione finora
- New Up Lab Manual v3Documento45 pagineNew Up Lab Manual v3Priyam Jain100% (1)
- Progress Seminar 15 October 2016Documento20 pagineProgress Seminar 15 October 2016Abhinav KhandekarNessuna valutazione finora
- PSIM Catalog PDFDocumento8 paginePSIM Catalog PDFkarthikp207Nessuna valutazione finora
- Design of Motor Failure Prediction Model For Sezibwa Sugar Factory PresentationDocumento28 pagineDesign of Motor Failure Prediction Model For Sezibwa Sugar Factory PresentationNSEREKO ISMAILNessuna valutazione finora
- Cloth Cutting Machine Using PLCDocumento33 pagineCloth Cutting Machine Using PLCrp9009Nessuna valutazione finora
- Final Report 8 TH SemDocumento50 pagineFinal Report 8 TH SemAritra ChatterjeeNessuna valutazione finora
- Electrical 2015Documento18 pagineElectrical 2015Sujit KangsabanikNessuna valutazione finora
- Syllabus For B.Tech (Electrical Engineering) Up To Fourth YearDocumento67 pagineSyllabus For B.Tech (Electrical Engineering) Up To Fourth YearDr. Kaushik MandalNessuna valutazione finora
- Transmission Medium: Barnali Gupta Banik Asst. Prof., Department of CSE St. Thomas College of Engineering & TechnologyDocumento19 pagineTransmission Medium: Barnali Gupta Banik Asst. Prof., Department of CSE St. Thomas College of Engineering & TechnologyAritra ChatterjeeNessuna valutazione finora
- 54 563Documento10 pagine54 563Animesh GhoshNessuna valutazione finora
- CAT 2012 Previous Year Question PaperDocumento8 pagineCAT 2012 Previous Year Question PaperkrishnakumariramNessuna valutazione finora
- Proj. Project No: 6. Study of SPV ModulesDocumento1 paginaProj. Project No: 6. Study of SPV ModulesAritra ChatterjeeNessuna valutazione finora
- Array&PointerDocumento49 pagineArray&PointerAritra Chatterjee100% (1)
- Principles of Management-2016 1st & 2nd IntenalDocumento367 paginePrinciples of Management-2016 1st & 2nd IntenalAritra ChatterjeeNessuna valutazione finora
- A3 Problem Solving TemplateDocumento4 pagineA3 Problem Solving TemplateSabina Teodora SavaNessuna valutazione finora
- Design of A Linear State Feedback ControllerDocumento27 pagineDesign of A Linear State Feedback ControllerMohammad IkhsanNessuna valutazione finora
- Depth and Heading Control For Autonomous Underwater Vehicle Using Estimated Hydrodynamic CoefficientsDocumento7 pagineDepth and Heading Control For Autonomous Underwater Vehicle Using Estimated Hydrodynamic CoefficientsSupun RandeniNessuna valutazione finora
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocumento7 pagineModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoNessuna valutazione finora
- Course Structure - Lean ProductionDocumento12 pagineCourse Structure - Lean ProductionMartin de la SotaNessuna valutazione finora
- Supervisory Fuzzy Logic Controller Used For Process Loop ControlDocumento6 pagineSupervisory Fuzzy Logic Controller Used For Process Loop ControlKentner Chavez CorreaNessuna valutazione finora
- Helmet Detection Using Machine Learning and Automatic License FinalDocumento47 pagineHelmet Detection Using Machine Learning and Automatic License FinalSridhar Rayakam75% (4)
- C HO 02. Reliability ManagementDocumento137 pagineC HO 02. Reliability ManagementRivaldi Raka AdityaNessuna valutazione finora
- Types of Systems: CSC 387 - System Analysis and DesignDocumento3 pagineTypes of Systems: CSC 387 - System Analysis and DesignPost Your FeedbackNessuna valutazione finora
- Curriculum Master ASTP: Classroom/ Private Workload (H) ECTS 12Documento1 paginaCurriculum Master ASTP: Classroom/ Private Workload (H) ECTS 12aafreen sayyadNessuna valutazione finora
- UNIT III TheoryDocumento6 pagineUNIT III TheoryRanchuNessuna valutazione finora
- Question Bank (4-5-6)Documento7 pagineQuestion Bank (4-5-6)Prajwal ParabNessuna valutazione finora
- Block Diagrams EnotesDocumento7 pagineBlock Diagrams Enotespatel_vicky87Nessuna valutazione finora
- RNTN PDFDocumento12 pagineRNTN PDFVikasNessuna valutazione finora
- Maintenance Pabrik Mind MapDocumento1 paginaMaintenance Pabrik Mind Mapsusetya saptoadiNessuna valutazione finora
- Improving Language Understanding by Generative Pre-TrainingDocumento12 pagineImproving Language Understanding by Generative Pre-Trainingwho datNessuna valutazione finora
- 1.2. Related FieldsDocumento10 pagine1.2. Related FieldsjmtruciosNessuna valutazione finora
- Sistem Informasi Tabungan Siswa (Sitasi) Berbasis Website Dengan Model PIECESDocumento9 pagineSistem Informasi Tabungan Siswa (Sitasi) Berbasis Website Dengan Model PIECESJasika Jurnal Sistem Informasi AkuntansiNessuna valutazione finora
- MS14e Chapter 06 Soln FinalDocumento30 pagineMS14e Chapter 06 Soln FinalHilea Jane GalesNessuna valutazione finora
- Delivery Process OpenUP LifecycleDocumento3 pagineDelivery Process OpenUP LifecycleLux VitaeNessuna valutazione finora
- Automation TestingDocumento3 pagineAutomation TestingLokendra Kumar VishwakarmaNessuna valutazione finora
- Chapter 2 - State Space RepresentationDocumento32 pagineChapter 2 - State Space RepresentationShah EmerulNessuna valutazione finora
- Process Control - Instrumentation and Control Engineering Interview QuestionsDocumento11 pagineProcess Control - Instrumentation and Control Engineering Interview QuestionsIffatNessuna valutazione finora
- PDFDocumento88 paginePDFArjun NandyNessuna valutazione finora
- ECSS-E-ST-10-02C-Rev.1 (1february2018) - Space Engineering - VerificationDocumento51 pagineECSS-E-ST-10-02C-Rev.1 (1february2018) - Space Engineering - VerificationAlbert AguileraNessuna valutazione finora
- Database Design Using The REA Data ModelDocumento18 pagineDatabase Design Using The REA Data ModelNigussie BerhanuNessuna valutazione finora