Potrebbero piacerti anche
- New Vistas On Automotive Embedded Systems: Edited and Presented by Alberto Sangiovanni-Vincentelli UC BerkeleyDocumento25 pagineNew Vistas On Automotive Embedded Systems: Edited and Presented by Alberto Sangiovanni-Vincentelli UC BerkeleyAnita IonelaNessuna valutazione finora
- Automotive Diagnostic Systems: Understanding OBD-I & OBD-II RevisedDa EverandAutomotive Diagnostic Systems: Understanding OBD-I & OBD-II RevisedValutazione: 4 su 5 stelle4/5 (3)
- 1 車用 CAN Bus 網路技術探討Documento72 pagine1 車用 CAN Bus 網路技術探討Wan Tak SiNessuna valutazione finora
- Microcontroller Pic-And-EepromDocumento22 pagineMicrocontroller Pic-And-Eepromwanisuyog88100% (1)
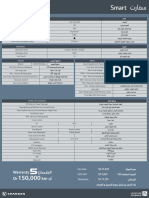
- CS35 Plus Spec Sheet 2024 UpdatedDocumento1 paginaCS35 Plus Spec Sheet 2024 Updatedpathan_riyazkhanNessuna valutazione finora
- Error CodesDocumento72 pagineError CodesAnthony Tiriba100% (3)
- Embedded System Design BSC 01Documento80 pagineEmbedded System Design BSC 01Tigabu YayaNessuna valutazione finora
- R30ca0181ed0200 Winning ComboDocumento40 pagineR30ca0181ed0200 Winning ComboVanHieu LuyenNessuna valutazione finora
- AUT F0615 Automotive Instrument Cluster Solutions From Low Line To Premium LineDocumento47 pagineAUT F0615 Automotive Instrument Cluster Solutions From Low Line To Premium LineWan Shahmisufi100% (1)
- Updated Digiscan Brochure - 29 NovDocumento6 pagineUpdated Digiscan Brochure - 29 NovTN47 BabyNessuna valutazione finora
- VastraJet Engineers Training ManualDocumento90 pagineVastraJet Engineers Training ManualKRISHNANessuna valutazione finora
- Automotive ElectronicsDocumento22 pagineAutomotive ElectronicsMadhusudhanan RavishankarNessuna valutazione finora
- Advanced Motion Controls DZCANTE-012L080Documento8 pagineAdvanced Motion Controls DZCANTE-012L080Servo2GoNessuna valutazione finora
- Advanced Motion Controls DZCANTE-040L080Documento8 pagineAdvanced Motion Controls DZCANTE-040L080Servo2GoNessuna valutazione finora
- Cisco CPRIDocumento88 pagineCisco CPRIHoàng TrườngNessuna valutazione finora
- Automatic Car Parking SystemDocumento2 pagineAutomatic Car Parking SystemCrispNessuna valutazione finora
- 08GPCat SinglePhaseDCDocumento22 pagine08GPCat SinglePhaseDCSAMO SAMARANessuna valutazione finora
- Lisec Glass Cutting Table Machine Retrofit - Saint GobainDocumento1 paginaLisec Glass Cutting Table Machine Retrofit - Saint GobaineacondeNessuna valutazione finora
- Catalog 2013Documento38 pagineCatalog 2013Mahmoud ElrefaeyNessuna valutazione finora
- GTFFR TfytbghbDocumento9 pagineGTFFR TfytbghbbrahimNessuna valutazione finora
- 20.0us $ - All Data Pro Alldata 10.53 Auto Repair Software Moto Heavy Duty Vivid Workshop Full Set 1Tb HDD For Car Truck Diagnostic Tools AliexpressDocumento5 pagine20.0us $ - All Data Pro Alldata 10.53 Auto Repair Software Moto Heavy Duty Vivid Workshop Full Set 1Tb HDD For Car Truck Diagnostic Tools Aliexpressravenhotrods64Nessuna valutazione finora
- 1220e Datasheet enDocumento6 pagine1220e Datasheet enAlexandra GarciaNessuna valutazione finora
- National - Automotive - Solutions AutomotiveDocumento32 pagineNational - Automotive - Solutions AutomotiveEdsonNessuna valutazione finora
- Acer Nitro 5 AN515-52 Compal FH52M LA-J891P Rev 0.1 Schematic DiagramDocumento112 pagineAcer Nitro 5 AN515-52 Compal FH52M LA-J891P Rev 0.1 Schematic DiagramJavier GonzalezNessuna valutazione finora
- RJ45CR3540Documento2 pagineRJ45CR3540prajapatirajesh1242Nessuna valutazione finora
- Advanced Motion Controls DPQNNIE-025B200Documento11 pagineAdvanced Motion Controls DPQNNIE-025B200Servo2GoNessuna valutazione finora
- Byd Folder SealDocumento7 pagineByd Folder Sealsamsmack69Nessuna valutazione finora
- Elm327 PDFDocumento1 paginaElm327 PDFAmeer AbdoNessuna valutazione finora
- Telematic SupplementDocumento14 pagineTelematic SupplementStuart SainsburyNessuna valutazione finora
- Auto Repair Technician Home: Home BMW Coding Auto Key Program Download & Installation DPF Tpms Shop Contact UsDocumento12 pagineAuto Repair Technician Home: Home BMW Coding Auto Key Program Download & Installation DPF Tpms Shop Contact UsStefBeck BeckNessuna valutazione finora
- Advanced Motion Controls DPCANTE-025B200Documento10 pagineAdvanced Motion Controls DPCANTE-025B200Servo2GoNessuna valutazione finora
- MotionUSA Line CardDocumento2 pagineMotionUSA Line CardCarlos Luis GutierrezNessuna valutazione finora
- Škoda Auto A.S. - The International WebsiteDocumento4 pagineŠkoda Auto A.S. - The International WebsiteRitz DurmiendoNessuna valutazione finora
- Embedded Vision and The Convergence Between Computer and Machine VisionDocumento16 pagineEmbedded Vision and The Convergence Between Computer and Machine Visionjeanca32Nessuna valutazione finora
- Low Cost, Complete 12-Bit Resolver-to-Digital Converter: CS Is Logic HIDocumento12 pagineLow Cost, Complete 12-Bit Resolver-to-Digital Converter: CS Is Logic HIFrantsiskoNessuna valutazione finora
- DS - 20210726 - SG3.0 3.6 4.0 5.0 6.0RS - V1.2.4 - enDocumento2 pagineDS - 20210726 - SG3.0 3.6 4.0 5.0 6.0RS - V1.2.4 - enFaridoke 3112Nessuna valutazione finora
- PDFDocumento103 paginePDFEduRoiNessuna valutazione finora
- CGC 400 Data Sheet 4921240426 UK - 2016.10.10Documento11 pagineCGC 400 Data Sheet 4921240426 UK - 2016.10.10bacNessuna valutazione finora
- SSDC SeriesDocumento48 pagineSSDC SeriesCông NguyễnNessuna valutazione finora
- Hectronic - FMS SolutionDocumento23 pagineHectronic - FMS SolutionJuanNessuna valutazione finora
- Advanced Motion Controls DPQNNIE-030A800Documento11 pagineAdvanced Motion Controls DPQNNIE-030A800Servo2GoNessuna valutazione finora
- Q Meter or RLC Meter or Quality Meter Working, Construction, & CalculationDocumento13 pagineQ Meter or RLC Meter or Quality Meter Working, Construction, & Calculationdan andreiNessuna valutazione finora
- Advanced Motion Controls DPQNNIE-015B200Documento10 pagineAdvanced Motion Controls DPQNNIE-015B200Servo2GoNessuna valutazione finora
- Detroit Transmissions Electronic ACRONYMSDocumento4 pagineDetroit Transmissions Electronic ACRONYMScells-crosser0xNessuna valutazione finora
- Gd350a Catalog v2.0Documento2 pagineGd350a Catalog v2.0ZE RU ENGNessuna valutazione finora
- Ds 20220516 sh3.0 3.6 4.0 5.0 6.0rs Datasheet v13 En-1Documento2 pagineDs 20220516 sh3.0 3.6 4.0 5.0 6.0rs Datasheet v13 En-1kbartelsNessuna valutazione finora
- A4 Data LinkDocumento5 pagineA4 Data Linkbreyesdelgadillo92Nessuna valutazione finora
- Acs 140Documento5 pagineAcs 140FiveStarNessuna valutazione finora
- Automotive Electronics: A Perspective On In-Motorcycle and In-Car Electronic SystemsDocumento24 pagineAutomotive Electronics: A Perspective On In-Motorcycle and In-Car Electronic SystemspaulwaNessuna valutazione finora
- Electric From SERVDocumento4 pagineElectric From SERVmkNessuna valutazione finora
- LA-H492P v0.1Documento100 pagineLA-H492P v0.1Mike OtteNessuna valutazione finora
- Sanden Michael Matthias1 CompressorDocumento14 pagineSanden Michael Matthias1 CompressorAnonymous 9xvU1FNessuna valutazione finora
- Sanden-Michael-Matthias1 Compressor PDFDocumento14 pagineSanden-Michael-Matthias1 Compressor PDF임학진0% (1)
- Advanced Packaging TrendsDocumento36 pagineAdvanced Packaging TrendsGabriel Donovan100% (1)
- Advanced Motion Controls DZRALTE-040L080Documento8 pagineAdvanced Motion Controls DZRALTE-040L080Servo2GoNessuna valutazione finora
- Schematics E50Documento9 pagineSchematics E50pronomix100% (3)
- Material Caterpillar 777d Off Highway Truck Machine Electronics Components Signals Input Output Devices ControlsDocumento32 pagineMaterial Caterpillar 777d Off Highway Truck Machine Electronics Components Signals Input Output Devices ControlsRoussel Florez Zuloaga100% (1)
- xEV Inverter Solution With An Inductive Position Sensor Application Model and Software PDFDocumento46 paginexEV Inverter Solution With An Inductive Position Sensor Application Model and Software PDFkrishrohanNessuna valutazione finora
- Basicele Electriciadad y SensoresDocumento41 pagineBasicele Electriciadad y SensoresCarcaustoCatt Benk100% (2)
- Candidate Sample CVDocumento3 pagineCandidate Sample CVJitesh PatelNessuna valutazione finora
- Cisco ActualTests 210-260 v2015-12-10 by EmyDocumento68 pagineCisco ActualTests 210-260 v2015-12-10 by EmyJitesh PatelNessuna valutazione finora
- Candidate Sample CVDocumento3 pagineCandidate Sample CVJitesh PatelNessuna valutazione finora
- Candidate Sample CVDocumento3 pagineCandidate Sample CVJitesh PatelNessuna valutazione finora
- Cisco ActualTests 210-260 v2015-12-15 by Dim 89qDocumento38 pagineCisco ActualTests 210-260 v2015-12-15 by Dim 89qJitesh PatelNessuna valutazione finora
- CCNA Security 210-260 Dump + Explanation (Updating ) - Script KiddieDocumento154 pagineCCNA Security 210-260 Dump + Explanation (Updating ) - Script KiddieJitesh PatelNessuna valutazione finora
- 210-260 Exam Dumps With PDF and VCE Download (1-30)Documento24 pagine210-260 Exam Dumps With PDF and VCE Download (1-30)Francisco Contreras AlcainoNessuna valutazione finora
- CCNPguy210-260 V1Documento60 pagineCCNPguy210-260 V1Jitesh PatelNessuna valutazione finora
- Asses Ment 1Documento16 pagineAsses Ment 1Jitesh PatelNessuna valutazione finora
- 210-260 Exam Dumps With PDF and VCE Download (1-30)Documento24 pagine210-260 Exam Dumps With PDF and VCE Download (1-30)Francisco Contreras AlcainoNessuna valutazione finora
- DoBetterScrum 09version v3.02Documento68 pagineDoBetterScrum 09version v3.02Jitesh PatelNessuna valutazione finora
- Design Synthesis and Optimization For Automotive Embedded SystemsDocumento36 pagineDesign Synthesis and Optimization For Automotive Embedded SystemsJitesh PatelNessuna valutazione finora
- SessionDocumento1 paginaSessionJHNessuna valutazione finora
- Dell Precision Mobile Workstation M4800 Owner's Manual: Downloaded From Manuals Search EngineDocumento83 pagineDell Precision Mobile Workstation M4800 Owner's Manual: Downloaded From Manuals Search EngineJitesh PatelNessuna valutazione finora
- A Look Inside Battery Management SystemsDocumento8 pagineA Look Inside Battery Management SystemsJitesh PatelNessuna valutazione finora
- SitusDocumento1 paginaSitusJitesh PatelNessuna valutazione finora
- AN Simple OOP in CDocumento15 pagineAN Simple OOP in CTrọngBằngNguyễnNessuna valutazione finora
- Form Aplikasi CCAI GTP 2011Documento5 pagineForm Aplikasi CCAI GTP 2011Tomo SiagianNessuna valutazione finora
- Mech302hw5s 2Documento11 pagineMech302hw5s 2priyadarshini212007Nessuna valutazione finora
- Sample Marketing Plan HondaDocumento14 pagineSample Marketing Plan HondaSaqib AliNessuna valutazione finora
- Ron Clark ReflectionDocumento3 pagineRon Clark Reflectionapi-376753605Nessuna valutazione finora
- Deception With GraphsDocumento7 pagineDeception With GraphsTanmay MaityNessuna valutazione finora
- Makalsh CMDDocumento22 pagineMakalsh CMDMaudy Rahmi HasniawatiNessuna valutazione finora
- A Week in My CountryDocumento2 pagineA Week in My CountryAQhuewulland Youngprincess HokageNarutoNessuna valutazione finora
- Functions of Communication Oral Communication PDFDocumento12 pagineFunctions of Communication Oral Communication PDFKrystle Francess Barrios0% (1)
- History Paper 2 IB Study GuideDocumento6 pagineHistory Paper 2 IB Study Guidersuresh1995100% (4)
- You Are Loved PDFDocumento4 pagineYou Are Loved PDFAbrielle Angeli DeticioNessuna valutazione finora
- Chapter 1Documento16 pagineChapter 1MulugetaNessuna valutazione finora
- Questionnaire HRISDocumento4 pagineQuestionnaire HRISAnonymous POUAc3zNessuna valutazione finora
- Reading8 PilkingtonDocumento8 pagineReading8 Pilkingtonab_amyNessuna valutazione finora
- TLG 82201Documento7 pagineTLG 82201beatmymeat100% (2)
- 3.1 Learning To Be A Better StudentDocumento27 pagine3.1 Learning To Be A Better StudentApufwplggl JomlbjhfNessuna valutazione finora
- Persephone by Julia Donaldson: (A Meadow. Enters Persephone, Picking The Petals of A Daisy.)Documento10 paginePersephone by Julia Donaldson: (A Meadow. Enters Persephone, Picking The Petals of A Daisy.)Dobler Liliana100% (1)
- Hinog vs. MellicorDocumento11 pagineHinog vs. MellicorGreta VilarNessuna valutazione finora
- 5909 East Kaviland AvenueDocumento1 pagina5909 East Kaviland Avenueapi-309853346Nessuna valutazione finora
- De Villa vs. Court of AppealsDocumento1 paginaDe Villa vs. Court of AppealsValerie Aileen AnceroNessuna valutazione finora
- Week 4 CasesDocumento38 pagineWeek 4 CasesJANNNessuna valutazione finora
- Dermatome, Myotome, SclerotomeDocumento4 pagineDermatome, Myotome, SclerotomeElka Rifqah100% (3)
- Cell Bio1Documento7 pagineCell Bio1AnyaNessuna valutazione finora
- Developing and Modifying Behavioral Coding Schemes in Pediatric Psychology: A Practical GuideDocumento11 pagineDeveloping and Modifying Behavioral Coding Schemes in Pediatric Psychology: A Practical GuideSergio A. Dávila SantanaNessuna valutazione finora
- Dribssa Beyene Security Sector Reform Paradox Somalia PublishedDocumento29 pagineDribssa Beyene Security Sector Reform Paradox Somalia PublishedNanny KebedeNessuna valutazione finora
- Anthropology Chapter 2 ADocumento17 pagineAnthropology Chapter 2 AHafiz SaadNessuna valutazione finora
- Cleric Spell List D&D 5th EditionDocumento9 pagineCleric Spell List D&D 5th EditionLeandros Mavrokefalos100% (2)
- Media Kit (Viet)Documento2 pagineMedia Kit (Viet)Nguyen Ho Thien DuyNessuna valutazione finora
- Electronic Check ProcessingDocumento1 paginaElectronic Check Processingaaes2Nessuna valutazione finora
- EmanDocumento3 pagineEmanCh NawazNessuna valutazione finora
- 2009-Journal of Pharmacy and PharmacologyDocumento37 pagine2009-Journal of Pharmacy and PharmacologyLeticia Bonancio CerqueiraNessuna valutazione finora