Potrebbero piacerti anche
- Modelling of Induction Motor PDFDocumento42 pagineModelling of Induction Motor PDFsureshNessuna valutazione finora
- Park Transformation and Clarke Transformation in DetailDocumento20 paginePark Transformation and Clarke Transformation in DetailKevin Dito GrandhikaNessuna valutazione finora
- TMS320F28335 DSP Programming Using MATLAB Simulink Embedded Coder: Techniques and AdvancementsDocumento7 pagineTMS320F28335 DSP Programming Using MATLAB Simulink Embedded Coder: Techniques and AdvancementsSaid MerengueNessuna valutazione finora
- Introduction To Transients in Electrical Circuits: Analytical and Digital Solution Using An EMTP-based Software (Power Systems)Documento1 paginaIntroduction To Transients in Electrical Circuits: Analytical and Digital Solution Using An EMTP-based Software (Power Systems)power systemNessuna valutazione finora
- 4-Electrical Machines PDFDocumento32 pagine4-Electrical Machines PDFRenkak OrNessuna valutazione finora
- A New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemDocumento6 pagineA New Method For Online Thyristor Conduction Monitoring Based On Thyristor Current Waveform Recording in Static Excitation SystemR0B0T2013Nessuna valutazione finora
- Real-Time Simulation Technology for Modern Power ElectronicsDa EverandReal-Time Simulation Technology for Modern Power ElectronicsNessuna valutazione finora
- Electric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyDocumento33 pagineElectric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyNithin Mohan91% (11)
- Modelling of IM Using DQ TransformationDocumento64 pagineModelling of IM Using DQ Transformationdivinelight100% (1)
- Analysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude ControlDocumento8 pagineAnalysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude Controleubis_machado4370Nessuna valutazione finora
- 2010 PHD Thesis Induction MotorDocumento132 pagine2010 PHD Thesis Induction MotorAmir RasyadanNessuna valutazione finora
- 03 TLP Using Directional Overcurrent Elements Part I r5Documento46 pagine03 TLP Using Directional Overcurrent Elements Part I r5afmNessuna valutazione finora
- Vector Control of Induction MotorDocumento10 pagineVector Control of Induction MotorRam Uday MandalNessuna valutazione finora
- Modelling of The Three-Phase Induction Motor Using SIMULINKDocumento3 pagineModelling of The Three-Phase Induction Motor Using SIMULINKsajs20175% (4)
- Servo Basico x1Documento18 pagineServo Basico x1Elvis Torres QuispeNessuna valutazione finora
- Dynamic Modelling of Induction MotorDocumento12 pagineDynamic Modelling of Induction Motorvidya_sagar826Nessuna valutazione finora
- Load Flow AnalysisDocumento12 pagineLoad Flow AnalysisHendra Dwi RamadhanNessuna valutazione finora
- Induction Motor DrivesDocumento73 pagineInduction Motor DrivesSai Pranahita KulithalaiNessuna valutazione finora
- Power System Stabilizers For The Synchronous Generator: Tuning and Performance EvaluationDocumento78 paginePower System Stabilizers For The Synchronous Generator: Tuning and Performance EvaluationVikas PatelNessuna valutazione finora
- Power System Stabliser: A ReviewDocumento71 paginePower System Stabliser: A ReviewPiyush AgnihotriNessuna valutazione finora
- Generator Capability Curve Constraint For PSO Based Optimal Power FlowDocumento6 pagineGenerator Capability Curve Constraint For PSO Based Optimal Power FlowAvinash PathakNessuna valutazione finora
- Speed Control of Induction MotorDocumento87 pagineSpeed Control of Induction MotorAmm Ãr75% (4)
- Power System Dynamics and ControlDocumento2 paginePower System Dynamics and ControlSudip MondalNessuna valutazione finora
- Transformadores de Instrumento AT PDFDocumento72 pagineTransformadores de Instrumento AT PDFAlbino Calderon MendezNessuna valutazione finora
- Power System StabilityDocumento83 paginePower System StabilitywaelNessuna valutazione finora
- EE8702 - Power System Operation and Control (Ripped From Amazon Kindle Ebooks by Sai Seena)Documento196 pagineEE8702 - Power System Operation and Control (Ripped From Amazon Kindle Ebooks by Sai Seena)19EEE009 Deepika SNessuna valutazione finora
- Synchronous Generator Transient AnalysisDocumento19 pagineSynchronous Generator Transient AnalysiskasunchamaraNessuna valutazione finora
- Induction MotorDocumento7 pagineInduction MotoruwaifotonyNessuna valutazione finora
- Multiquadrant Dynamics in The Speed-Torque PlaneDocumento41 pagineMultiquadrant Dynamics in The Speed-Torque PlanethanvandhNessuna valutazione finora
- of SRMDocumento22 pagineof SRMGopoji Dayanand71% (7)
- Modeling and Simulation of SVPWM Based Application: Ashish K. Porwal Ketan M. BariaDocumento35 pagineModeling and Simulation of SVPWM Based Application: Ashish K. Porwal Ketan M. BariaAshish PorwalNessuna valutazione finora
- HYGOVDocumento134 pagineHYGOVtiojejao0% (1)
- Lecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationDocumento24 pagineLecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationAshish KumarNessuna valutazione finora
- Lab Volt PWM AC Motor DrivesDocumento103 pagineLab Volt PWM AC Motor Drivesumer farooqNessuna valutazione finora
- Steady-State Stability Limit Studies Using Matlab SimulationDocumento12 pagineSteady-State Stability Limit Studies Using Matlab SimulationPius OdabaNessuna valutazione finora
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocumento8 pagineCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNessuna valutazione finora
- Abc To DQDocumento29 pagineAbc To DQKarThiNessuna valutazione finora
- Model Development and Validation of Brushless ExcitersDocumento8 pagineModel Development and Validation of Brushless ExcitersAmberMeerabNessuna valutazione finora
- Estabilidad en Sistemas de PotenciaDocumento50 pagineEstabilidad en Sistemas de PotenciaedwinoriaNessuna valutazione finora
- Microsoft Word - Arbitrary Reference Frame TheoryDocumento8 pagineMicrosoft Word - Arbitrary Reference Frame Theorysameerpatel157700% (1)
- New9000English Mannual PDFDocumento344 pagineNew9000English Mannual PDFLe Chi Pham100% (1)
- Impact of AVR On StabilityDocumento44 pagineImpact of AVR On StabilityMamta MrjnNessuna valutazione finora
- IEEE Kundur & Taylor - The Anatomy of A Power Grid BlackoutDocumento8 pagineIEEE Kundur & Taylor - The Anatomy of A Power Grid BlackoutGustavo AguayoNessuna valutazione finora
- Multilin: Synchronism Check EquipmentDocumento26 pagineMultilin: Synchronism Check EquipmentĐức Nguyễn XuânNessuna valutazione finora
- J. B. Ward - Equivalent Circuits For Power Flow StudiesDocumento10 pagineJ. B. Ward - Equivalent Circuits For Power Flow StudiesfarhanhosseiniNessuna valutazione finora
- Power Electronics and Control PDFDocumento45 paginePower Electronics and Control PDFmichaelNessuna valutazione finora
- Synchronization Checklist PDFDocumento8 pagineSynchronization Checklist PDFAdhyartha KerafNessuna valutazione finora
- IEEE 34 Bus Intermittent Sources PDFDocumento8 pagineIEEE 34 Bus Intermittent Sources PDFKancherla SameeraNessuna valutazione finora
- System StabilityDocumento32 pagineSystem Stabilityelectron teslaNessuna valutazione finora
- Grounding System Modeling in EMTP Based On Its Frequency ResponseDocumento5 pagineGrounding System Modeling in EMTP Based On Its Frequency ResponseCerduardo Chanchisco Roga RojasNessuna valutazione finora
- Electrical Machines 1 Lab Manual May 2015Documento129 pagineElectrical Machines 1 Lab Manual May 2015SufiSayyidZakiyahNessuna valutazione finora
- Comparison of Matlab PST, PSAT and DigSILENTDocumento6 pagineComparison of Matlab PST, PSAT and DigSILENTSemih HürmeydanNessuna valutazione finora
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDa EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Integration of Green and Renewable Energy in Electric Power SystemsDa EverandIntegration of Green and Renewable Energy in Electric Power SystemsNessuna valutazione finora
- 2014 00d - Generators, Transformers, Per Unit System PDFDocumento99 pagine2014 00d - Generators, Transformers, Per Unit System PDFDanny MartinNessuna valutazione finora
- Induction Motor NotesDocumento20 pagineInduction Motor NotesMani SaiNessuna valutazione finora
- TUTORIAL3 Phasesystems SOLUTIONv2Documento13 pagineTUTORIAL3 Phasesystems SOLUTIONv2770300aNessuna valutazione finora
- EEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttDocumento16 pagineEEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttMohd Mohsin KhanNessuna valutazione finora
- 5Documento5 pagine5MohammedHaythamNessuna valutazione finora
- Ijett V24P245Documento6 pagineIjett V24P245MohammedHaythamNessuna valutazione finora
- Important Vector Control PDFDocumento4 pagineImportant Vector Control PDFMohammedHaythamNessuna valutazione finora
- 7Documento5 pagine7MohammedHaythamNessuna valutazione finora
- Fuzzy PDFDocumento6 pagineFuzzy PDFMohammedHaythamNessuna valutazione finora
- Auto RecloserDocumento16 pagineAuto RecloserMohammedHaythamNessuna valutazione finora
- Induction Motor Speed ControlDocumento4 pagineInduction Motor Speed ControlMohammedHaythamNessuna valutazione finora
- Power Electronics Using Simulink - Er ViveKDocumento82 paginePower Electronics Using Simulink - Er ViveKMohammedHaytham100% (2)
- v23 5Documento6 paginev23 5MuhammadAtifNessuna valutazione finora
- Electrical Protection Application Get 8402Documento15 pagineElectrical Protection Application Get 8402javedsmg1Nessuna valutazione finora
- Single Phase Controlled RectifierDocumento38 pagineSingle Phase Controlled RectifierYaolin Xu100% (1)
- 03 F Space - Vector PDFDocumento10 pagine03 F Space - Vector PDFNaz AlyNessuna valutazione finora
- Series CompensationDocumento7 pagineSeries CompensationMohammedHaythamNessuna valutazione finora
- Exp 1Documento3 pagineExp 1MohammedHaythamNessuna valutazione finora
- Controlling The Speed of A DC Motor UsingDocumento7 pagineControlling The Speed of A DC Motor UsingMohammedHaythamNessuna valutazione finora
- Earth Science NAME - DATEDocumento3 pagineEarth Science NAME - DATEArlene CalataNessuna valutazione finora
- Science9 Q4 Week2Documento16 pagineScience9 Q4 Week2Maria Josie Lopez TumlosNessuna valutazione finora
- Hand Winches 122 Load Sheaves 126 Gear-And Worm Gear Winches 127 Electric Worm Gear Winches 131 Snatch Blocks 133Documento14 pagineHand Winches 122 Load Sheaves 126 Gear-And Worm Gear Winches 127 Electric Worm Gear Winches 131 Snatch Blocks 133Rajaram JayaramanNessuna valutazione finora
- DIY Toolkit Arabic Web VersionDocumento168 pagineDIY Toolkit Arabic Web VersionAyda AlshamsiNessuna valutazione finora
- P D P: C I D, C M: Design of Coastal RoadsDocumento55 pagineP D P: C I D, C M: Design of Coastal RoadsMohammedNessuna valutazione finora
- New Microsoft Word DocumentDocumento3 pagineNew Microsoft Word DocumentAditya ShanbhagNessuna valutazione finora
- Training Design SprintDocumento11 pagineTraining Design Sprintardi wiantoNessuna valutazione finora
- Gracella Irwana - G - Pert 04 - Sia - 1Documento35 pagineGracella Irwana - G - Pert 04 - Sia - 1Gracella IrwanaNessuna valutazione finora
- 한국항만 (영문)Documento38 pagine한국항만 (영문)hiyeonNessuna valutazione finora
- Taylorism vs. FordismDocumento2 pagineTaylorism vs. FordismLiv Maloney67% (3)
- Kaun Banega Crorepati Computer C++ ProjectDocumento20 pagineKaun Banega Crorepati Computer C++ ProjectDhanya SudheerNessuna valutazione finora
- UpdateJul2007 3julDocumento10 pagineUpdateJul2007 3julAnshul SinghNessuna valutazione finora
- Reinforced Concrete Design PDFDocumento1 paginaReinforced Concrete Design PDFhallelNessuna valutazione finora
- Collins Ks3 Science Homework Book 3Documento5 pagineCollins Ks3 Science Homework Book 3g3pz0n5h100% (1)
- Lecture BouffonDocumento1 paginaLecture BouffonCarlos Enrique GuerraNessuna valutazione finora
- PID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDocumento7 paginePID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDenisNessuna valutazione finora
- Pipe Freezing StudyDocumento8 paginePipe Freezing StudymirekwaznyNessuna valutazione finora
- Coal Mining Technology and SafetyDocumento313 pagineCoal Mining Technology and Safetymuratandac3357Nessuna valutazione finora
- Literature Review - Part Time Job Among StudentDocumento3 pagineLiterature Review - Part Time Job Among StudentMarria65% (20)
- Department of Education: Republic of The PhilippinesDocumento2 pagineDepartment of Education: Republic of The PhilippinesISMAEL KRIS DELA CRUZNessuna valutazione finora
- Circuit Construction: Assignment 3Documento45 pagineCircuit Construction: Assignment 3ali morisyNessuna valutazione finora
- ENSC1001 Unit Outline 2014Documento12 pagineENSC1001 Unit Outline 2014TheColonel999Nessuna valutazione finora
- 3E Hand Over NotesDocumento3 pagine3E Hand Over NotesAshutosh MaiidNessuna valutazione finora
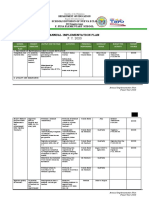
- AIP 2020 FINAL JuneDocumento5 pagineAIP 2020 FINAL JuneVINA ARIETANessuna valutazione finora
- Design of Purlins: Try 75mm X 100mm: Case 1Documento12 pagineDesign of Purlins: Try 75mm X 100mm: Case 1Pamela Joanne Falo AndradeNessuna valutazione finora
- The Philippine GovernmentDocumento21 pagineThe Philippine GovernmentChristel ChuchipNessuna valutazione finora
- Unit-5 Harmonics & FiltersDocumento25 pagineUnit-5 Harmonics & FiltersBhanu100% (1)
- Sousa2019 PDFDocumento38 pagineSousa2019 PDFWilly PurbaNessuna valutazione finora
- Academic Performance of Senior High School Students 4Ps Beneficiaries in VNHSDocumento19 pagineAcademic Performance of Senior High School Students 4Ps Beneficiaries in VNHSkathlen mae marollanoNessuna valutazione finora
- A Structural Modelo of Limital Experienci Un TourismDocumento15 pagineA Structural Modelo of Limital Experienci Un TourismcecorredorNessuna valutazione finora