Potrebbero piacerti anche
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsDa EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNessuna valutazione finora
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationDa EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNessuna valutazione finora
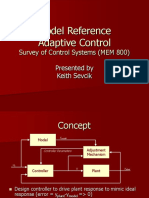
- Model Reference Adaptive Control: Survey of Control Systems (MEM 800)Documento26 pagineModel Reference Adaptive Control: Survey of Control Systems (MEM 800)Gilmar LeiteNessuna valutazione finora
- MIT RuleDocumento17 pagineMIT RuleHữu Thịnh ĐỗNessuna valutazione finora
- Adaptive Control: Presented by Harikrishna Satish.TDocumento22 pagineAdaptive Control: Presented by Harikrishna Satish.THari ThotaNessuna valutazione finora
- IMC-Based PID Controllers Design For Torsional Vibration SystemDocumento4 pagineIMC-Based PID Controllers Design For Torsional Vibration SystemHilton SeheresNessuna valutazione finora
- MRACDocumento26 pagineMRACRj YashNessuna valutazione finora
- Simulation Research of Fuzzy Auto-Tuning Controller Based OnDocumento4 pagineSimulation Research of Fuzzy Auto-Tuning Controller Based OnZikra ElninoNessuna valutazione finora
- 16.323 Principles of Optimal Control: Mit OpencoursewareDocumento18 pagine16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNessuna valutazione finora
- Direct and Indirect Self-Tuning Generalized Minimum Variance ControlDocumento12 pagineDirect and Indirect Self-Tuning Generalized Minimum Variance ControlSadagopan RajaNessuna valutazione finora
- Electronics 08 00221Documento13 pagineElectronics 08 00221AMAN GOYALNessuna valutazione finora
- The Application of Nonlinear PID Controller in Generator Excitation SystemDocumento6 pagineThe Application of Nonlinear PID Controller in Generator Excitation SystemNor Rochmad Hadi PNessuna valutazione finora
- Model Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationDocumento19 pagineModel Predictive Control of A Permanent Magnet Synchronous Motor With Experimental ValidationAlimamy KoromaNessuna valutazione finora
- Reduced Order ControllerDocumento6 pagineReduced Order Controllerabyss2000Nessuna valutazione finora
- Experiment On Servo Positioning ControlDocumento9 pagineExperiment On Servo Positioning ControlPinaki SankarNessuna valutazione finora
- Direct Torque Control of PMSM Using Fuzz PDFDocumento7 pagineDirect Torque Control of PMSM Using Fuzz PDFImam Muhammad HakimNessuna valutazione finora
- Adaptive Control 2Documento30 pagineAdaptive Control 2kanchiNessuna valutazione finora
- Me389 Aero01 Vtol GuidelineDocumento11 pagineMe389 Aero01 Vtol GuidelineMustafa Fazal AbbasNessuna valutazione finora
- Cascade Controller Design For Compliant Actuators: Tao Qiao, Shusheng BiDocumento7 pagineCascade Controller Design For Compliant Actuators: Tao Qiao, Shusheng BiAl-ShukaNessuna valutazione finora
- Synchronous Generator Output Voltage Real-Time Feedback Control Via StrategyDocumento9 pagineSynchronous Generator Output Voltage Real-Time Feedback Control Via Strategydebasishmee5808Nessuna valutazione finora
- Adaptive Microcomputer: Controller ImplementationDocumento11 pagineAdaptive Microcomputer: Controller ImplementationToe Zune MayNessuna valutazione finora
- IJSS Micic 2002Documento13 pagineIJSS Micic 2002Anonymous WkbmWCa8MNessuna valutazione finora
- Adaptive PID Controller For DC Motor Speed ControlDocumento5 pagineAdaptive PID Controller For DC Motor Speed ControlHilal PermanaNessuna valutazione finora
- Cascaded PIDDocumento14 pagineCascaded PIDTatenda BizureNessuna valutazione finora
- 1.an Advanced Control Strategy For Magnetic Levitation Train System Based On An Online Adaptive Pid ControllerDocumento6 pagine1.an Advanced Control Strategy For Magnetic Levitation Train System Based On An Online Adaptive Pid ControllerManuel DíazNessuna valutazione finora
- 8.1. Lab ObjectiveDocumento6 pagine8.1. Lab ObjectiveJang-Suh Justin LeeNessuna valutazione finora
- Model Reference Adaptive ControlDocumento22 pagineModel Reference Adaptive ControlRamaDinakaranNessuna valutazione finora
- Computer Simulation Model of A Lift Car Assembly With An Active Tuned Mass DamperDocumento6 pagineComputer Simulation Model of A Lift Car Assembly With An Active Tuned Mass DamperfreddyjoertyNessuna valutazione finora
- 1 Linear MPCDocumento139 pagine1 Linear MPC?媛Nessuna valutazione finora
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDocumento10 pagineRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNessuna valutazione finora
- Performances and Analysis of D.C Machine Using PID Controller - IJSETDocumento5 paginePerformances and Analysis of D.C Machine Using PID Controller - IJSETChristian MarquezNessuna valutazione finora
- PID Controlled Synchronous Motor For Power Factor CorrectionDocumento5 paginePID Controlled Synchronous Motor For Power Factor CorrectionigoreliasNessuna valutazione finora
- A Digital Control Technique For A Single Phase PWM InverterDocumento3 pagineA Digital Control Technique For A Single Phase PWM Invertersa920189Nessuna valutazione finora
- An Introduction To Proportional-Integral-Derivative (PID) ControllersDocumento47 pagineAn Introduction To Proportional-Integral-Derivative (PID) ControllersAmar BeheraNessuna valutazione finora
- CEP Control System Sp2019V2Documento3 pagineCEP Control System Sp2019V2Ahmed AkramNessuna valutazione finora
- Paper 2 PDFDocumento4 paginePaper 2 PDFJose MedinaNessuna valutazione finora
- Comparison of Field-Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor (PMSM)Documento7 pagineComparison of Field-Oriented Control and Direct Torque Control For Permanent Magnet Synchronous Motor (PMSM)Book4AllNessuna valutazione finora
- Optimal Control of Interior Permanent Magnet Synchronous Integrated Starter-GeneratorDocumento9 pagineOptimal Control of Interior Permanent Magnet Synchronous Integrated Starter-GeneratorMuhammad MudassarNessuna valutazione finora
- A PI Controller Based On Gain-Scheduling For Synchronous GeneratorDocumento11 pagineA PI Controller Based On Gain-Scheduling For Synchronous GeneratoratirinaNessuna valutazione finora
- Application of Improved PID Controller in Motor Drive SystemDocumento19 pagineApplication of Improved PID Controller in Motor Drive SystemmahderNessuna valutazione finora
- Robust Position Control in DC Motor by Fuzzy Sliding Mode ControlDocumento6 pagineRobust Position Control in DC Motor by Fuzzy Sliding Mode ControlHoàng LongNessuna valutazione finora
- Speed Control of DC Motor Using Pid ControllerDocumento4 pagineSpeed Control of DC Motor Using Pid ControllerIvan David Smith100% (1)
- Priprema Za Ispit 2Documento8 paginePriprema Za Ispit 2Aleksandar MicicNessuna valutazione finora
- Filehost 6544062 Daniel Goleman Inteligenta EmotinalaDocumento11 pagineFilehost 6544062 Daniel Goleman Inteligenta EmotinalaAdrian-Daniel NechitaNessuna valutazione finora
- Simulation of PMSM Vector Controlled (Simulink)Documento4 pagineSimulation of PMSM Vector Controlled (Simulink)visal pradeepkumarNessuna valutazione finora
- 1375620Documento6 pagine1375620revs_eeeNessuna valutazione finora
- Ujca1 15000591Documento7 pagineUjca1 15000591Yang YingNessuna valutazione finora
- Electric Vehicle Powertrain Simulation To Optimize Battery and Vehicle PerformancesDocumento5 pagineElectric Vehicle Powertrain Simulation To Optimize Battery and Vehicle PerformancesNarendra YadavNessuna valutazione finora
- Energies: Design of Microgrid Protection Schemes Using PscadDocumento19 pagineEnergies: Design of Microgrid Protection Schemes Using Pscadzaid Al-hadrawiNessuna valutazione finora
- Energies: Design of Microgrid Protection Schemes Using PscadDocumento19 pagineEnergies: Design of Microgrid Protection Schemes Using PscadAli AldesogeNessuna valutazione finora
- Sensors 20 01946Documento23 pagineSensors 20 01946nimNessuna valutazione finora
- Optimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranDocumento6 pagineOptimization of A Control Loop Using Adaptive Method: K.Prabhu, Dr. V. Murali BhaskaranztztztztNessuna valutazione finora
- Optimal Economic Schedule For A Network of Microgrids With Hybrid Energy Storage System Using Distributed Model Predictive ControlDocumento10 pagineOptimal Economic Schedule For A Network of Microgrids With Hybrid Energy Storage System Using Distributed Model Predictive ControlQg Nicole VenusNessuna valutazione finora
- Research On Differential Protection Algorithms of Power TransformersDocumento6 pagineResearch On Differential Protection Algorithms of Power TransformersrstppNessuna valutazione finora
- Design of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIDocumento6 pagineDesign of Digital PID Controller Based On FPGA: Shi-Kui XIE, Sheng-Nan JI, Jie-Tao WU, Pei-Gang LI and Chao-Rong LIRamaDinakaranNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Microelectronic Systems 1 Checkbook: The Checkbook SeriesDa EverandMicroelectronic Systems 1 Checkbook: The Checkbook SeriesNessuna valutazione finora
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Title - Dating Virtual To Coffee Table Keywords - Dating, Application BlogDocumento3 pagineTitle - Dating Virtual To Coffee Table Keywords - Dating, Application BlogRajni DhimanNessuna valutazione finora
- P4 Science Topical Questions Term 1Documento36 pagineP4 Science Topical Questions Term 1Sean Liam0% (1)
- Applications PDFDocumento90 pagineApplications PDFahmedNessuna valutazione finora
- Directorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries BhadrakDocumento1 paginaDirectorate of Indian Medicines & Homoeopathy, Orissa, Bhubaneswar Listof The Homoeopathic Dispensaries Bhadrakbiswajit mathematicsNessuna valutazione finora
- Mywizard For AIOps - Virtual Agent (ChatBOT)Documento27 pagineMywizard For AIOps - Virtual Agent (ChatBOT)Darío Aguirre SánchezNessuna valutazione finora
- Psyche Finals: Trans 2: Psychotic Disorder: SchizophreniaDocumento4 paginePsyche Finals: Trans 2: Psychotic Disorder: SchizophreniajisooNessuna valutazione finora
- Embraer ERJ-170: Power PlantDocumento5 pagineEmbraer ERJ-170: Power Plantபென்ஸிஹர்Nessuna valutazione finora
- Claudia Maienborn, Semantics, 381Documento34 pagineClaudia Maienborn, Semantics, 381robert guimaraesNessuna valutazione finora
- Chapter 17 Study Guide: VideoDocumento7 pagineChapter 17 Study Guide: VideoMruffy DaysNessuna valutazione finora
- JurnalDocumento12 pagineJurnalSandy Ronny PurbaNessuna valutazione finora
- QFW Series SteamDocumento8 pagineQFW Series Steamnikon_fa50% (2)
- Leonard Nadler' ModelDocumento3 pagineLeonard Nadler' ModelPiet Gabz67% (3)
- Amazon VS WalmartDocumento5 pagineAmazon VS WalmartBrandy M. Twilley100% (1)
- What Role Does Imagination Play in Producing Knowledge About The WorldDocumento1 paginaWhat Role Does Imagination Play in Producing Knowledge About The WorldNathanael Samuel KuruvillaNessuna valutazione finora
- R07 SET-1: Code No: 07A6EC04Documento4 pagineR07 SET-1: Code No: 07A6EC04Jithesh VNessuna valutazione finora
- Outbound Idocs Code Error Event Severity Sap MeaningDocumento2 pagineOutbound Idocs Code Error Event Severity Sap MeaningSummit YerawarNessuna valutazione finora
- Super Gene 1201-1300Documento426 pagineSuper Gene 1201-1300Henri AtanganaNessuna valutazione finora
- 525 2383 2 PBDocumento5 pagine525 2383 2 PBiwang saudjiNessuna valutazione finora
- Grade 8 Science Text Book 61fb9947be91fDocumento289 pagineGrade 8 Science Text Book 61fb9947be91fNadarajah PragatheeswarNessuna valutazione finora
- Vishakha BroadbandDocumento6 pagineVishakha Broadbandvishakha sonawaneNessuna valutazione finora
- Annexure To SOW 3 STD Specification For Welding and NDT PipingDocumento15 pagineAnnexure To SOW 3 STD Specification For Welding and NDT PipingASHISH GORDENessuna valutazione finora
- Classroom Activty Rubrics Classroom Activty Rubrics: Total TotalDocumento1 paginaClassroom Activty Rubrics Classroom Activty Rubrics: Total TotalMay Almerez- WongNessuna valutazione finora
- Centric WhitepaperDocumento25 pagineCentric WhitepaperFadhil ArsadNessuna valutazione finora
- Saunders & Cornnet Solution Chapter 1 Part 1Documento5 pagineSaunders & Cornnet Solution Chapter 1 Part 1Mo AlamNessuna valutazione finora
- Abbott 2021 ApJL 915 L5Documento24 pagineAbbott 2021 ApJL 915 L5Manju SanthakumariNessuna valutazione finora
- LADP HPDocumento11 pagineLADP HPrupeshsoodNessuna valutazione finora
- Angles, Bearings and AzimuthDocumento10 pagineAngles, Bearings and AzimuthMarc Dared CagaoanNessuna valutazione finora
- Rizal Noli Me TangereDocumento35 pagineRizal Noli Me TangereKristine Cantilero100% (2)
- 555 TimerDocumento25 pagine555 TimerDr-Muhammad Aqeel AslamNessuna valutazione finora
- Homelite 18V Hedge Trimmer - UT31840 - Users ManualDocumento18 pagineHomelite 18V Hedge Trimmer - UT31840 - Users ManualgunterivNessuna valutazione finora