Potrebbero piacerti anche
- Toyota Landcruiser 100 Series 1FZ-FE 4 - 5L 2BARDocumento1 paginaToyota Landcruiser 100 Series 1FZ-FE 4 - 5L 2BARedison patiño100% (3)
- Micromine TutorialDocumento5 pagineMicromine TutorialFerdinand Siahaan100% (1)
- BMM3553 Mechanical Vibrations: Chapter 3: Damped Vibration of Single Degree of Freedom System (Part 1)Documento37 pagineBMM3553 Mechanical Vibrations: Chapter 3: Damped Vibration of Single Degree of Freedom System (Part 1)Alooy MohamedNessuna valutazione finora
- P Training For ResilienceDocumento35 pagineP Training For ResilienceLbrito01100% (1)
- User Manual ManoScanDocumento58 pagineUser Manual ManoScanNurul FathiaNessuna valutazione finora
- Vacuum Braking SystemDocumento20 pagineVacuum Braking SystemPrashant RaiNessuna valutazione finora
- Module 8 - Facilitating Learner - Centered TeachingDocumento4 pagineModule 8 - Facilitating Learner - Centered TeachingSheila Mae Paltep100% (3)
- T T D T X X: The 1D Diffusion Problem IsDocumento9 pagineT T D T X X: The 1D Diffusion Problem IsAhmed HwaidiNessuna valutazione finora
- EngAn3 CFD 2013 14 Lect - 6Documento28 pagineEngAn3 CFD 2013 14 Lect - 6raphael.sanchesNessuna valutazione finora
- Intro To SignalsDocumento17 pagineIntro To SignalsSampath KumarNessuna valutazione finora
- 4b - Implementation - Dynamics and VibrationsDocumento24 pagine4b - Implementation - Dynamics and Vibrationscharlottekiel12Nessuna valutazione finora
- DSP HandoutsDocumento11 pagineDSP HandoutsG A E SATISH KUMARNessuna valutazione finora
- Ece 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XDocumento4 pagineEce 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XistegNessuna valutazione finora
- Heat Equation PDFDocumento4 pagineHeat Equation PDFKeerthi VasanNessuna valutazione finora
- Part - A: Ext X Extxt RDocumento22 paginePart - A: Ext X Extxt RSneghaa PNessuna valutazione finora
- DSP Using ARMDocumento25 pagineDSP Using ARMVinitKharkarNessuna valutazione finora
- Lecture 04Documento35 pagineLecture 04Daniele PasseroneNessuna valutazione finora
- Homework 6 SolutionsDocumento14 pagineHomework 6 SolutionsAE ENessuna valutazione finora
- Introduction To Signals & Variables Lecture-2Documento17 pagineIntroduction To Signals & Variables Lecture-2seltyNessuna valutazione finora
- Chapter 1 DSIP 2022Documento81 pagineChapter 1 DSIP 2022Hinal PujaraNessuna valutazione finora
- Chapter 5 Transient and Steady State ResponseDocumento33 pagineChapter 5 Transient and Steady State ResponseSounak ChoudhuryNessuna valutazione finora
- Digital Measurement of Frequency With Linear Interpolation in Dynamic StatesDocumento4 pagineDigital Measurement of Frequency With Linear Interpolation in Dynamic StatesGoran MiljkovicNessuna valutazione finora
- Lecture 02Documento11 pagineLecture 02Jerry HalibasNessuna valutazione finora
- Spread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceDocumento29 pagineSpread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceHimanshu AgrawalNessuna valutazione finora
- Signals & SystemDocumento26 pagineSignals & SystemMuhammadUsamaNessuna valutazione finora
- Week 1 - Discrete-Time Signals and Systems (Convolution & Correlation)Documento25 pagineWeek 1 - Discrete-Time Signals and Systems (Convolution & Correlation)Adrian WongNessuna valutazione finora
- Signal 22Documento323 pagineSignal 22ERMIAS AmanuelNessuna valutazione finora
- EEE 226: Signals and Systems Lecture Notes # 2Documento3 pagineEEE 226: Signals and Systems Lecture Notes # 2Ewnetu kassaNessuna valutazione finora
- AutocorrelationDocumento5 pagineAutocorrelationNusrat Jahan MoonNessuna valutazione finora
- 8 Sequence and SeriesDocumento45 pagine8 Sequence and SeriesnrrarishaNessuna valutazione finora
- Feedback Control SystemDocumento29 pagineFeedback Control SystemKelvin KongNessuna valutazione finora
- AdvDSP Lecture1Documento43 pagineAdvDSP Lecture1Alireza DabiryNessuna valutazione finora
- Least Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDocumento24 pagineLeast Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDenis Constantin Ilie-AblachimNessuna valutazione finora
- Quantum Optics The Coherent States of Light: M. Brune, A. Aspect Homework of Lesson 2Documento4 pagineQuantum Optics The Coherent States of Light: M. Brune, A. Aspect Homework of Lesson 2bruhbruhbruhNessuna valutazione finora
- RecurrencesDocumento49 pagineRecurrenceskok_oc25Nessuna valutazione finora
- SECA1301 NotesDocumento125 pagineSECA1301 NotesJais S.Nessuna valutazione finora
- Appendix Rev 3 13.6.19Documento7 pagineAppendix Rev 3 13.6.19Ramaneish SivaNessuna valutazione finora
- Solution Methods and Stability AnalysisDocumento77 pagineSolution Methods and Stability Analysistech100% (1)
- Trigonometric Fourier Series: - OutlineDocumento23 pagineTrigonometric Fourier Series: - OutlineBoy KerenzNessuna valutazione finora
- Chapter 10 - Fourier Analysis: J.R. Wilson January 7, 2018Documento15 pagineChapter 10 - Fourier Analysis: J.R. Wilson January 7, 2018Roy VeseyNessuna valutazione finora
- Electronics &communication EngineeringDocumento17 pagineElectronics &communication EngineeringSuman BhattacharyyaNessuna valutazione finora
- 02 Part3Documento25 pagine02 Part3Heba M.RabeaNessuna valutazione finora
- Signals and Systems For Signals and Systems ForDocumento65 pagineSignals and Systems For Signals and Systems ForMenchaNessuna valutazione finora
- Class 15th JanDocumento2 pagineClass 15th JanmileknzNessuna valutazione finora
- Lecture 2Documento27 pagineLecture 2uckyourabbitNessuna valutazione finora
- FirstorderdesDocumento7 pagineFirstorderdesTayyaba AfzalNessuna valutazione finora
- Minor 1 SPDocumento2 pagineMinor 1 SPom prakash vermaNessuna valutazione finora
- Ch1 IntroDSP2024Documento26 pagineCh1 IntroDSP2024ansvn2 mathNessuna valutazione finora
- Introduction of Signals and Systems - Part02Documento45 pagineIntroduction of Signals and Systems - Part02HermyraJ RobertNessuna valutazione finora
- Linear Circuit Analysis (EE-101) : Electric SignalsDocumento18 pagineLinear Circuit Analysis (EE-101) : Electric SignalsTehseen HussainNessuna valutazione finora
- Odes: Initial-Value ProblemsDocumento88 pagineOdes: Initial-Value ProblemsAndres S LutzNessuna valutazione finora
- f22 hw0 SolDocumento12 paginef22 hw0 SolPeter RosenbergNessuna valutazione finora
- EE311 Lecture TheeDocumento18 pagineEE311 Lecture TheeĤmăđę HmNessuna valutazione finora
- Principle of Communication EngineeringDocumento52 paginePrinciple of Communication Engineeringسعيد ابوسريعNessuna valutazione finora
- Chapter 2 SystemDocumento8 pagineChapter 2 Systemعظات روحيةNessuna valutazione finora
- Review of Discrete-Time Signals and Systems: Henry D. Pfister Based On Notes by Tie Liu February 4, 2019Documento31 pagineReview of Discrete-Time Signals and Systems: Henry D. Pfister Based On Notes by Tie Liu February 4, 2019Jose G. TorresNessuna valutazione finora
- Signals and Systems For Signals and Systems ForDocumento74 pagineSignals and Systems For Signals and Systems ForSameer LakraNessuna valutazione finora
- CHAPTER 3: Basic Methods, Basic ConceptsDocumento44 pagineCHAPTER 3: Basic Methods, Basic ConceptsSatyanarayana NeeliNessuna valutazione finora
- 3 Discrete Time Signal OperationsDocumento24 pagine3 Discrete Time Signal Operationsmyself a student of btech 1st yr100% (11)
- (A) For Transient Response, We Have 4 Specifications:: (A) T - Rise TimeDocumento54 pagine(A) For Transient Response, We Have 4 Specifications:: (A) T - Rise TimejameelahmadNessuna valutazione finora
- 4.1 General Theory of NTH Order Linear EquationsDocumento19 pagine4.1 General Theory of NTH Order Linear EquationsMohNajiNessuna valutazione finora
- Lecture 4Documento16 pagineLecture 4Fong Wei JunNessuna valutazione finora
- Gupta Lecture3Documento55 pagineGupta Lecture3Rakesh PogulaNessuna valutazione finora
- Signal and SystemDocumento152 pagineSignal and System22bei001Nessuna valutazione finora
- Analytic Pricing of Exotic Discrete Variance Swaps and OptionsDocumento55 pagineAnalytic Pricing of Exotic Discrete Variance Swaps and OptionsGaurav VermaNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- Erp FinalDocumento33 pagineErp FinaltenetchatNessuna valutazione finora
- Salon Building Guidelines PDFDocumento8 pagineSalon Building Guidelines PDFtsnie toNessuna valutazione finora
- Maxdb Backup RecoveryDocumento44 pagineMaxdb Backup Recoveryft1ft1Nessuna valutazione finora
- MP CRPDocumento2 pagineMP CRPankutupanaNessuna valutazione finora
- Principles of Marketing: Strategic Planning and The Marketing ProcessDocumento16 paginePrinciples of Marketing: Strategic Planning and The Marketing ProcessAneel ZiaNessuna valutazione finora
- ĐÁP ÁN ĐỀ THI THỬ SỐ 03 (2019-2020)Documento8 pagineĐÁP ÁN ĐỀ THI THỬ SỐ 03 (2019-2020)Đào VânNessuna valutazione finora
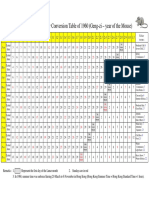
- Gregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Documento1 paginaGregorian-Lunar Calendar Conversion Table of 1960 (Geng-Zi - Year of The Mouse)Anomali SahamNessuna valutazione finora
- Fundamentals of Logistics XI - 2023Documento45 pagineFundamentals of Logistics XI - 2023saiyaNessuna valutazione finora
- Report Palazzetto Croci SpreadsDocumento73 pagineReport Palazzetto Croci SpreadsUntaru EduardNessuna valutazione finora
- PmtsDocumento46 paginePmtsDhiraj ZanzadNessuna valutazione finora
- Lessons From The Humanitarian Disaster Logistics Management A Case Study of The Earthquake in HaitiDocumento19 pagineLessons From The Humanitarian Disaster Logistics Management A Case Study of The Earthquake in HaitiM Irfan Kemal100% (1)
- Algorithm Design TechniquesDocumento24 pagineAlgorithm Design TechniquespermasaNessuna valutazione finora
- Note 15-Feb-2023Documento4 pagineNote 15-Feb-2023Oliver ScissorsNessuna valutazione finora
- Apache Nifi Tutorial - What Is - Architecture - InstallationDocumento5 pagineApache Nifi Tutorial - What Is - Architecture - InstallationMario SoaresNessuna valutazione finora
- New York LifeDocumento38 pagineNew York LifeDaniel SineusNessuna valutazione finora
- Part-II Poem Article and Report For College Magazine-2015-16 Dr.M.Q. KhanDocumento4 paginePart-II Poem Article and Report For College Magazine-2015-16 Dr.M.Q. KhanTechi Son taraNessuna valutazione finora
- Sagan WaltzDocumento14 pagineSagan WaltzKathleen RoseNessuna valutazione finora
- ICCM2014Documento28 pagineICCM2014chenlei07Nessuna valutazione finora
- AWANA Handbook 2010-2011Documento8 pagineAWANA Handbook 2010-2011carriepratchard100% (1)
- DIFFERENCE BETWEEN Intrior Design and DecorationDocumento13 pagineDIFFERENCE BETWEEN Intrior Design and DecorationSadaf khanNessuna valutazione finora
- Edwards SVV HandoutDocumento2 pagineEdwards SVV HandoutossinNessuna valutazione finora
- Chapter 3Documento26 pagineChapter 3Francis Anthony CataniagNessuna valutazione finora
- 1973 Essays On The Sources For Chinese History CanberraDocumento392 pagine1973 Essays On The Sources For Chinese History CanberraChanna LiNessuna valutazione finora
- Test Bank For Macroeconomics 8th Canadian Edition Andrew AbelDocumento16 pagineTest Bank For Macroeconomics 8th Canadian Edition Andrew AbelstebinrothNessuna valutazione finora