Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Engineering Mechanics Course Description and ContentsDocumento2 pagineEngineering Mechanics Course Description and ContentsSarah LeonenNessuna valutazione finora
- Solution Manual HydraulicsDocumento14 pagineSolution Manual HydraulicsVivekka Olivia John75% (4)
- Shear Centre Structure 1 Lab ReportDocumento12 pagineShear Centre Structure 1 Lab ReportAshrafur Rahman100% (1)
- ISO 3046 Reciprocating PLTDDocumento5 pagineISO 3046 Reciprocating PLTDtuxiboiNessuna valutazione finora
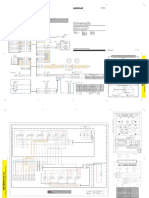
- Introduction To Three Phase PowerDocumento25 pagineIntroduction To Three Phase PowerSyed Raheel AdeelNessuna valutazione finora
- Work and Energy WorksheetsDocumento8 pagineWork and Energy Worksheetsdddn1328Nessuna valutazione finora
- The 20 Reasons Startups FailDocumento25 pagineThe 20 Reasons Startups Failsavsonic100% (1)
- PhenylpropanolamineDocumento27 paginePhenylpropanolaminepeterjohnsonuk100% (1)
- AdiabaticDocumento2 pagineAdiabaticapi-225932882Nessuna valutazione finora
- Critical Flow Rate - ColemanDocumento2 pagineCritical Flow Rate - ColemanArt RodriguezNessuna valutazione finora
- Investment Plan and Startegy To Increase Transaparancy and Governance On PLN's ProjectsDocumento10 pagineInvestment Plan and Startegy To Increase Transaparancy and Governance On PLN's ProjectsFREE FOR FREEDOMNessuna valutazione finora
- Bonding Optics To MetalsDocumento8 pagineBonding Optics To MetalscavadavNessuna valutazione finora
- Ship ItDocumento46 pagineShip Itaswin vasudevamNessuna valutazione finora
- Maryam Tohidi - Building The Right Product and Getting It RightDocumento79 pagineMaryam Tohidi - Building The Right Product and Getting It RightRickyNessuna valutazione finora
- Absorption of Formaldehyde in WaterDocumento135 pagineAbsorption of Formaldehyde in WaterBer GuzNessuna valutazione finora
- Tri Cot IsmDocumento1 paginaTri Cot Ismrafa_castillo_2Nessuna valutazione finora
- CB Insights Tech Trends 2019Documento57 pagineCB Insights Tech Trends 2019Dilyana GeorgievaNessuna valutazione finora
- Asia Partners 2019 Southeast Asia Internet Report PDFDocumento77 pagineAsia Partners 2019 Southeast Asia Internet Report PDFRickyNessuna valutazione finora
- CB Insights - Technology Shipping Briefing PDFDocumento46 pagineCB Insights - Technology Shipping Briefing PDFSweta MishraNessuna valutazione finora
- Michael Seibel - How To Plan An MVPDocumento12 pagineMichael Seibel - How To Plan An MVPRicky100% (1)
- On The Contrary NTUDocumento28 pagineOn The Contrary NTURickyNessuna valutazione finora
- Ifa, Mabbit, Puput - Putting Yourself and Your Team in Non-Tech Savvy Users - ShoesDocumento71 pagineIfa, Mabbit, Puput - Putting Yourself and Your Team in Non-Tech Savvy Users - ShoesRickyNessuna valutazione finora
- INSEAD DP Brochure 2019 - MIM FINAL 26 June 2019 PDFDocumento12 pagineINSEAD DP Brochure 2019 - MIM FINAL 26 June 2019 PDFRickyNessuna valutazione finora
- Michael Seibel - How To Plan An MVPDocumento12 pagineMichael Seibel - How To Plan An MVPRicky100% (1)
- Nation X Bukalapak Design Conference Round 5 - Culture - ContextDocumento27 pagineNation X Bukalapak Design Conference Round 5 - Culture - ContextRickyNessuna valutazione finora
- Maryam Tohidi - Building The Right Product and Getting It RightDocumento79 pagineMaryam Tohidi - Building The Right Product and Getting It RightRickyNessuna valutazione finora
- Eric Migicovsky - How To Talk To UsersDocumento27 pagineEric Migicovsky - How To Talk To UsersRickyNessuna valutazione finora
- Michael Seibel - How To Plan An MVPDocumento12 pagineMichael Seibel - How To Plan An MVPRicky100% (1)
- IndonesiaStrategy-WhereToBePositioned20180913Documento38 pagineIndonesiaStrategy-WhereToBePositioned20180913Andy WidyasayogoNessuna valutazione finora
- BukaDesign Roundup 5: Edmund Goh - Beyond ResearchDocumento28 pagineBukaDesign Roundup 5: Edmund Goh - Beyond ResearchRickyNessuna valutazione finora
- Andrew Warr - Skills of The Modern ResearcherDocumento20 pagineAndrew Warr - Skills of The Modern ResearcherRickyNessuna valutazione finora
- New Paradigm in Infrastructure FinancingDocumento9 pagineNew Paradigm in Infrastructure FinancingFREE FOR FREEDOMNessuna valutazione finora
- Roland Berger Retail Banking SurveyDocumento28 pagineRoland Berger Retail Banking SurveyRicky100% (1)
- Startup Report 2018 PDFDocumento35 pagineStartup Report 2018 PDFbenyhartoNessuna valutazione finora
- CHAPTER 1 Sistem KendaliDocumento35 pagineCHAPTER 1 Sistem KendaliRickyNessuna valutazione finora
- BJT Small SignalDocumento22 pagineBJT Small SignalRickyNessuna valutazione finora
- Emona Datex Vol2 Labmanual Ver1 1 StudentDocumento338 pagineEmona Datex Vol2 Labmanual Ver1 1 StudentRickyNessuna valutazione finora
- At Mega 8535 No PasswordDocumento321 pagineAt Mega 8535 No PasswordRickyNessuna valutazione finora
- Pre Requisite: BE 100 Engineering MechanicsDocumento3 paginePre Requisite: BE 100 Engineering MechanicsBalagopal VNessuna valutazione finora
- Free Fall: Nattanon VeerakulDocumento9 pagineFree Fall: Nattanon Veerakulapi-327824456Nessuna valutazione finora
- Fpure ContentsDocumento2 pagineFpure Contentsadityacsk100% (1)
- Chap 3 Laplace Transform FOC AssignmentDocumento6 pagineChap 3 Laplace Transform FOC AssignmentdudescapeNessuna valutazione finora
- 1102 Exp09 Lenz LawDocumento9 pagine1102 Exp09 Lenz Lawbecca1987Nessuna valutazione finora
- CH 19Documento21 pagineCH 19Sanjay Kumar100% (1)
- Bld323 Tutorial KitDocumento32 pagineBld323 Tutorial KitSue IlaNessuna valutazione finora
- Chemical Bonding and Molecular StructureDocumento12 pagineChemical Bonding and Molecular StructureAthulRKrishnanNessuna valutazione finora
- Solutions To Chapter 11 Problems 2014 Structural and Stress Analysis Third EditionDocumento15 pagineSolutions To Chapter 11 Problems 2014 Structural and Stress Analysis Third EditionAlainNessuna valutazione finora
- Instructions For Experiment 5Documento5 pagineInstructions For Experiment 5ratsateNessuna valutazione finora
- Angular Wave Functions 11Documento16 pagineAngular Wave Functions 11Rajeev GangwarNessuna valutazione finora
- Chapter 25 - Star & The UniverseDocumento4 pagineChapter 25 - Star & The UniverseNayeem HakimNessuna valutazione finora
- The Curl of A Vector FieldDocumento7 pagineThe Curl of A Vector FieldManoj1508AravindNessuna valutazione finora
- Chemistry 1A03 Introductory Chemistry I: Unit 3 Atomic Structure & TheoryDocumento57 pagineChemistry 1A03 Introductory Chemistry I: Unit 3 Atomic Structure & TheoryRob SmithNessuna valutazione finora
- Nuclear Medicine Definition of Terms 1 PDFDocumento2 pagineNuclear Medicine Definition of Terms 1 PDFpia toledoNessuna valutazione finora
- Exercise 2Documento23 pagineExercise 2Tushar RajNessuna valutazione finora
- Cat PDFDocumento2 pagineCat PDFIreneusz PłusaNessuna valutazione finora
- A9. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines Opportunities and ChallengesDocumento15 pagineA9. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines Opportunities and Challengeswalidghoneim1970Nessuna valutazione finora
- Motion of A Rigid BodyDocumento14 pagineMotion of A Rigid Bodyzoya daccaniNessuna valutazione finora