Potrebbero piacerti anche
- Data2vec: A General Framework For Self-Supervised Learning in Speech, Vision & LanguageDocumento20 pagineData2vec: A General Framework For Self-Supervised Learning in Speech, Vision & LanguageSoumyadipto BanerjeeNessuna valutazione finora
- Database AssignmentDocumento13 pagineDatabase AssignmentyamunahNessuna valutazione finora
- Project of Mechanical Measurement and Control SystemDocumento20 pagineProject of Mechanical Measurement and Control SystemPrashant Singh SankhalaNessuna valutazione finora
- 07 KalmanexamplesDocumento34 pagine07 KalmanexamplesGonzaloNessuna valutazione finora
- Kalman ReportDocumento24 pagineKalman Reportsameerfarooq420840Nessuna valutazione finora
- Kalman Filtering: Dan SimonDocumento8 pagineKalman Filtering: Dan SimonVaBi LeftNessuna valutazione finora
- Kalman FilterDocumento21 pagineKalman FilterSamuel Tumelero ValdugaNessuna valutazione finora
- Kalman FiltersDocumento24 pagineKalman Filtersgerte_yuewNessuna valutazione finora
- Salim Khan Electronic Information Engineering Super Visor Prof Bai LinDocumento26 pagineSalim Khan Electronic Information Engineering Super Visor Prof Bai Linsaalim_khan1Nessuna valutazione finora
- Mau05MathKalman PDFDocumento10 pagineMau05MathKalman PDFMococo CatNessuna valutazione finora
- Kalman FilterDocumento21 pagineKalman Filterbogdan.oancea3651Nessuna valutazione finora
- Introduction To Kalman Filtering: An Engineer's PerspectiveDocumento42 pagineIntroduction To Kalman Filtering: An Engineer's PerspectiveSilvia ChioreanNessuna valutazione finora
- Trajectory Tracking & Path-Following Control: Cooperative Control of Multiple Robotic Vehicles: Theory and PracticeDocumento31 pagineTrajectory Tracking & Path-Following Control: Cooperative Control of Multiple Robotic Vehicles: Theory and Practiceakashpatro25Nessuna valutazione finora
- Kalman Filtering and GPS: Avinash Singh 08115022Documento10 pagineKalman Filtering and GPS: Avinash Singh 08115022Avinash SinghNessuna valutazione finora
- Kalman Filter Implementation: First Part of ImplementationDocumento10 pagineKalman Filter Implementation: First Part of ImplementationMed Hamza OuertaniNessuna valutazione finora
- Mobile Robot Localization and Mapping Using The Kalman FilterDocumento53 pagineMobile Robot Localization and Mapping Using The Kalman Filterjohnnyz88Nessuna valutazione finora
- Kalman DelphiDocumento8 pagineKalman DelphiNegru CiprianNessuna valutazione finora
- 4.3.1 The Kalman FilterDocumento3 pagine4.3.1 The Kalman FilterartNessuna valutazione finora
- Kalman FiltersDocumento7 pagineKalman FiltersRicardo Del RíoNessuna valutazione finora
- PID Control - KeyDocumento50 paginePID Control - KeyHaozhi LiNessuna valutazione finora
- Levy1997 KFWorkhorse Kalman FilterDocumento20 pagineLevy1997 KFWorkhorse Kalman FiltersatishnawatheNessuna valutazione finora
- NI Tutorial 10703 enDocumento7 pagineNI Tutorial 10703 enthulinh12a1Nessuna valutazione finora
- Introduction To Kalman Filters: Michael Williams 5 June 2003Documento23 pagineIntroduction To Kalman Filters: Michael Williams 5 June 2003Muni Sankar MatamNessuna valutazione finora
- Extended Kalman Filter Based Missile Tracking: Yassir Obeid Mohammed, Dr. Abdelrasoul Jabar AlzubaidiDocumento3 pagineExtended Kalman Filter Based Missile Tracking: Yassir Obeid Mohammed, Dr. Abdelrasoul Jabar AlzubaidiInternational Journal of computational Engineering research (IJCER)Nessuna valutazione finora
- SKF Final DocumentationDocumento80 pagineSKF Final DocumentationDeepkar ReddyNessuna valutazione finora
- FalconSAT 4 Orbital Estimation Using Kalman and Least-Squares Techniques - SmallDocumento12 pagineFalconSAT 4 Orbital Estimation Using Kalman and Least-Squares Techniques - SmallRathod ShankarNessuna valutazione finora
- An Introduction To The Extended Kalman FilterDocumento4 pagineAn Introduction To The Extended Kalman FilterVu Duc TruongNessuna valutazione finora
- Noise Canceling in Audio Signal With Adaptive FilterDocumento6 pagineNoise Canceling in Audio Signal With Adaptive FilterDiệp Xuân NamNessuna valutazione finora
- PDF Blog Post: The System StateDocumento11 paginePDF Blog Post: The System Staterohit mittalNessuna valutazione finora
- Kalman IP CV-Without MotionDocumento49 pagineKalman IP CV-Without MotionHamid BazarganiNessuna valutazione finora
- State Estimation Using Kalman FilterDocumento32 pagineState Estimation Using Kalman FilterViraj ChaudharyNessuna valutazione finora
- Equalization and Diversity Techniques For Wireless Communicati 2Documento27 pagineEqualization and Diversity Techniques For Wireless Communicati 2Arun GopinathNessuna valutazione finora
- Chapter 4 ControlDocumento44 pagineChapter 4 ControlFootball HDNessuna valutazione finora
- Unit 4-From Recusrsive EstimationDocumento17 pagineUnit 4-From Recusrsive EstimationTufail DarNessuna valutazione finora
- Ant Colony Optimization: Prepared By: Ahmad Elshamli, Daniel Asmar, Fadi ElmasriDocumento97 pagineAnt Colony Optimization: Prepared By: Ahmad Elshamli, Daniel Asmar, Fadi ElmasriChandra Mouli KoduriNessuna valutazione finora
- GPS Navigation With Kalman Filter IntegrationDocumento25 pagineGPS Navigation With Kalman Filter IntegrationKim Cương PhạmNessuna valutazione finora
- Laaraiedh PythonPapers KalmanDocumento5 pagineLaaraiedh PythonPapers KalmanRyan DavisNessuna valutazione finora
- 12.540 Principles of The Global Positioning System: Prof. Thomas Herring Room 54-820A 253-5941Documento19 pagine12.540 Principles of The Global Positioning System: Prof. Thomas Herring Room 54-820A 253-5941Abdurrahman TelliNessuna valutazione finora
- Hand Gesture Based Wireless RobotDocumento13 pagineHand Gesture Based Wireless RobotRaj Pratap SinghNessuna valutazione finora
- IVM DIP Apendix FilteringDocumento48 pagineIVM DIP Apendix FilteringfcikanNessuna valutazione finora
- EE 322 Control TheoryDocumento37 pagineEE 322 Control TheoryshrnbolonneNessuna valutazione finora
- 10 1109@ivs 2004 1336492Documento5 pagine10 1109@ivs 2004 1336492Rider Paredes MarazaNessuna valutazione finora
- Instrumentation & ControlDocumento19 pagineInstrumentation & ControlFarrukh JavedNessuna valutazione finora
- Attitude Determination and Bias Estimation Using Kalman Filtering - YadlinDocumento11 pagineAttitude Determination and Bias Estimation Using Kalman Filtering - Yadlingussai33Nessuna valutazione finora
- Stable System:: Bilinear TransformDocumento7 pagineStable System:: Bilinear TransformSulaimanNessuna valutazione finora
- Linear Control System: Presented by Imran Basha SyedDocumento35 pagineLinear Control System: Presented by Imran Basha SyedSyed Imran BashaNessuna valutazione finora
- Automated Control Resumen Unidd IVDocumento23 pagineAutomated Control Resumen Unidd IVRakgnar LodbrokNessuna valutazione finora
- Practical Controls For Robot Geeks: Ted Larson Winter 2008Documento31 paginePractical Controls For Robot Geeks: Ted Larson Winter 2008Anup ShindeNessuna valutazione finora
- Implementation and Statistical Analysis of A Differential GPS SystemDocumento61 pagineImplementation and Statistical Analysis of A Differential GPS SystemRajesh KarriNessuna valutazione finora
- Introduction To PeakvueDocumento55 pagineIntroduction To PeakvueAhmed Nazeem100% (4)
- Sensor FusionDocumento5 pagineSensor FusionKeerthana AtchutuniNessuna valutazione finora
- Speech Enhancement Using Kalman FilterDocumento14 pagineSpeech Enhancement Using Kalman FilterTharunNessuna valutazione finora
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringDa EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNessuna valutazione finora
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDa EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNessuna valutazione finora
- Collision Detection: Understanding Visual Intersections in Computer VisionDa EverandCollision Detection: Understanding Visual Intersections in Computer VisionNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- The Congruence ModelDocumento10 pagineThe Congruence ModelJay AdrianNessuna valutazione finora
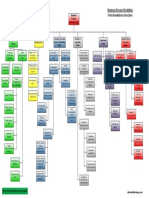
- Maintenance Process MapDocumento11 pagineMaintenance Process MapCandis YeldellNessuna valutazione finora
- AI SyllabusDocumento2 pagineAI Syllabushema reddyNessuna valutazione finora
- AAT CONTROL11to20 22 23Documento2 pagineAAT CONTROL11to20 22 23krushnasamy subramaniyanNessuna valutazione finora
- Using Dataflow Diagrams: Systems Analysis and Design, Kendall & KendallDocumento50 pagineUsing Dataflow Diagrams: Systems Analysis and Design, Kendall & Kendallhey yehNessuna valutazione finora
- 4 Managing Systems ProjectsDocumento43 pagine4 Managing Systems Projectscr4v3nNessuna valutazione finora
- 4a ReliabilityDocumento22 pagine4a ReliabilityRamaswamy Subbiah100% (1)
- 5 Years Anna University GE2022 Total Quality ManagemntDocumento19 pagine5 Years Anna University GE2022 Total Quality ManagemntManimegalaiNessuna valutazione finora
- FarahSadia CVDocumento2 pagineFarahSadia CVUmar ZadaNessuna valutazione finora
- The Relationship of System Engineering To The Project Cycle PDFDocumento12 pagineThe Relationship of System Engineering To The Project Cycle PDFpirotte100% (1)
- Test PlanDocumento60 pagineTest Planphan trungNessuna valutazione finora
- AssingmentDocumento4 pagineAssingmentIslam SaleemNessuna valutazione finora
- AIEdge MLArchiveDocumento93 pagineAIEdge MLArchiveSaty RaghavacharyNessuna valutazione finora
- Assignment Breakdown MISDocumento3 pagineAssignment Breakdown MISPratibha MallaNessuna valutazione finora
- 2 Convolutional Neural Network For Image ClassificationDocumento6 pagine2 Convolutional Neural Network For Image ClassificationKompruch BenjaputharakNessuna valutazione finora
- STLCDocumento24 pagineSTLCAryaman SinghNessuna valutazione finora
- L2 - Software Engineering Process ModelsDocumento25 pagineL2 - Software Engineering Process Modelslolzcat3454Nessuna valutazione finora
- BPM WBSDocumento1 paginaBPM WBSALEJANDRANessuna valutazione finora
- UML Diagram Types GuideDocumento17 pagineUML Diagram Types GuideahmedNessuna valutazione finora
- Synergy of IoT & AI PDFDocumento15 pagineSynergy of IoT & AI PDFSujit Kumar SahooNessuna valutazione finora
- Implementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveDocumento13 pagineImplementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveMuruganandam MasilamaniNessuna valutazione finora
- 04-Regression-III Machine LearningDocumento26 pagine04-Regression-III Machine LearningAli DonNessuna valutazione finora
- Software Engineering: Coding and TestingDocumento10 pagineSoftware Engineering: Coding and TestingUsama QaziNessuna valutazione finora
- (SwArch - 2021ii) - Course PresentationDocumento23 pagine(SwArch - 2021ii) - Course PresentationLiseth ArévaloNessuna valutazione finora
- Quiz Week 5 - Attempt Review MK 1Documento11 pagineQuiz Week 5 - Attempt Review MK 1talitha ameiliaNessuna valutazione finora
- SDLCDocumento2 pagineSDLCsofiNessuna valutazione finora
- SMC RMI February 2023 CONSO REVISEDDocumento174 pagineSMC RMI February 2023 CONSO REVISEDFrancisCarloTadenaNessuna valutazione finora
- Meta Pseudo LabelsDocumento12 pagineMeta Pseudo LabelsSiddharth ShahNessuna valutazione finora