Potrebbero piacerti anche
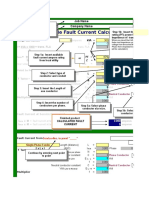
- Fault Ver 2017 Tables ExposedDocumento5 pagineFault Ver 2017 Tables ExposedAdan DubeNessuna valutazione finora
- CAD SeminarDocumento31 pagineCAD SeminarAdan DubeNessuna valutazione finora
- Mplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideDocumento30 pagineMplab Xc8 Getting Started Guide Mplab XC8 Getting Started GuideanandkalodeNessuna valutazione finora
- RF PGDocumento38 pagineRF PGAdan DubeNessuna valutazione finora
- ECE 440 Cheat SheetDocumento2 pagineECE 440 Cheat SheetAdan DubeNessuna valutazione finora
- Altium Designer Guide: Electronics and Computer Systems EngineeringDocumento54 pagineAltium Designer Guide: Electronics and Computer Systems EngineeringAdan DubeNessuna valutazione finora
- Don't Set Up Any Dimension Just Click Ok. We Are Not Getting To The Layout NowDocumento1 paginaDon't Set Up Any Dimension Just Click Ok. We Are Not Getting To The Layout NowAdan DubeNessuna valutazione finora
- EECS150 - Digital Design: Lecture 28 - More Flip-FlopsDocumento7 pagineEECS150 - Digital Design: Lecture 28 - More Flip-FlopsAdan DubeNessuna valutazione finora
- Objective Que - of EeeDocumento149 pagineObjective Que - of EeeNikhil Pareek100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- BE Information Technology 2008 CourseDocumento41 pagineBE Information Technology 2008 Coursemanjushajagtap79Nessuna valutazione finora
- Appin Technology Lab: Homtech Diploma Program Embedded Systems and Robotics Course Content (2010-2011)Documento7 pagineAppin Technology Lab: Homtech Diploma Program Embedded Systems and Robotics Course Content (2010-2011)Bipul KumarNessuna valutazione finora
- Edge Computing For Autonomous Driving - Opportunities and Challenges PDFDocumento20 pagineEdge Computing For Autonomous Driving - Opportunities and Challenges PDFChen ZengNessuna valutazione finora
- ELEC3730 Course Outline 2014S1Documento6 pagineELEC3730 Course Outline 2014S1May Su Sandy LwinNessuna valutazione finora
- Exercise #1 ReportDocumento15 pagineExercise #1 ReportRamnarayan ShreyasNessuna valutazione finora
- ThreadX User GuideDocumento362 pagineThreadX User GuidetrungvbNessuna valutazione finora
- C Based Embedded System DesignDocumento2 pagineC Based Embedded System Designabc75Nessuna valutazione finora
- 2C-ESP8266 SDK Programming Guide en v1.4Documento183 pagine2C-ESP8266 SDK Programming Guide en v1.4zaleksNessuna valutazione finora
- Autosar Os NewDocumento40 pagineAutosar Os NewNandini0% (1)
- SAD Unit 4 Real Time Systems1Documento20 pagineSAD Unit 4 Real Time Systems1onesnoneNessuna valutazione finora
- DIT OS NotesDocumento11 pagineDIT OS Notessameerahmadkhan130Nessuna valutazione finora
- Real Time Operating SystemDocumento11 pagineReal Time Operating SystemvarshaNessuna valutazione finora
- Vtu 5th Sem Open ElectivesDocumento10 pagineVtu 5th Sem Open ElectivesRamya ShreeNessuna valutazione finora
- MtechsyllabusDocumento22 pagineMtechsyllabusvirendra_verma5Nessuna valutazione finora
- 06EC762-Real Time SystemDocumento3 pagine06EC762-Real Time SystempatilrajucNessuna valutazione finora
- Sys BiosDocumento243 pagineSys BiosdjstojicNessuna valutazione finora
- Operating SystemDocumento33 pagineOperating SystemYatharth GargNessuna valutazione finora
- Unit 1Documento19 pagineUnit 1Vishant ChaudharyNessuna valutazione finora
- Unit II - CPU SchedulingDocumento37 pagineUnit II - CPU SchedulingNikita PadaliaNessuna valutazione finora
- ch5 CPU SchedulingDocumento72 paginech5 CPU SchedulingIlham HafizNessuna valutazione finora
- IT1353 Embedded System (All 5 Units)Documento71 pagineIT1353 Embedded System (All 5 Units)Dr. N.ShanmugasundaramNessuna valutazione finora
- RTOS uCOS IIDocumento66 pagineRTOS uCOS IIAkshay BhosaleNessuna valutazione finora
- RTX 51Documento18 pagineRTX 51Lova KiranvarmaNessuna valutazione finora
- Military Aviation Real Time Software Operating Systems - Military & Aerospace ElectronicsDocumento23 pagineMilitary Aviation Real Time Software Operating Systems - Military & Aerospace ElectronicsParasaram SrinivasNessuna valutazione finora
- RTS MCQDocumento4 pagineRTS MCQVibhaNessuna valutazione finora
- Low Latency Music SoftwareDocumento5 pagineLow Latency Music SoftwareStephen DaviesNessuna valutazione finora
- EceDocumento58 pagineEceJanardhan ChNessuna valutazione finora
- Rtos 1Documento22 pagineRtos 1VariNessuna valutazione finora
- Esd Unit 3,4,5Documento67 pagineEsd Unit 3,4,519-488 Karthik GoudNessuna valutazione finora
- MUST-DO Questions For Interviews (DBMS, CN and OS)Documento3 pagineMUST-DO Questions For Interviews (DBMS, CN and OS)Dhananjay DubeyNessuna valutazione finora