Potrebbero piacerti anche
- Special Electrical MachinesDocumento62 pagineSpecial Electrical MachinesVineeth Valiyaveedu Vijayan100% (9)
- Electrical Machines by Mr. S. K. Sahdev1Documento980 pagineElectrical Machines by Mr. S. K. Sahdev1dea boazynha100% (1)
- Stepper MotorDocumento26 pagineStepper MotorSupriya Rakshit100% (1)
- SynchmachineDocumento27 pagineSynchmachinesrinimeha@gmail.comNessuna valutazione finora
- Ac Motor Control k2636 - Rev2Documento12 pagineAc Motor Control k2636 - Rev2kobiNessuna valutazione finora
- Optocoupler or Optoisolator PDFDocumento10 pagineOptocoupler or Optoisolator PDFpiyushpandeyNessuna valutazione finora
- Unit - V: Single Phase Induction Motors and Special MachinesDocumento49 pagineUnit - V: Single Phase Induction Motors and Special MachinessasikalasivakumarNessuna valutazione finora
- Ac Ac ConverterDocumento56 pagineAc Ac ConverterPutri Hanifah SNessuna valutazione finora
- Stepper Motor and DrivesDocumento8 pagineStepper Motor and DrivesLasantha Abeykoon100% (2)
- Pre-Commissioning Test of Transformer at SiteDocumento2 paginePre-Commissioning Test of Transformer at SiteMohammad Husain86% (7)
- Single Phase Induction Motor PDFDocumento32 pagineSingle Phase Induction Motor PDFHarsh RanaNessuna valutazione finora
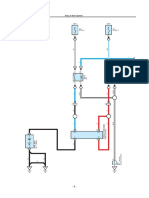
- System Circuit Engine - Hybrid System Stop - Start SystemDocumento19 pagineSystem Circuit Engine - Hybrid System Stop - Start SystemEdik Bonifacio MamaniNessuna valutazione finora
- Unit 2 PDFDocumento170 pagineUnit 2 PDFSaurabh RajNessuna valutazione finora
- EEE 309 Communication Theory: Dr. Md. Forkan Uddin Assistant Professor Dept. of EEE, BUET, Dhaka 10000Documento23 pagineEEE 309 Communication Theory: Dr. Md. Forkan Uddin Assistant Professor Dept. of EEE, BUET, Dhaka 10000Khalid MahmudNessuna valutazione finora
- Transformer Most Important MCQDocumento4 pagineTransformer Most Important MCQRaisul Haque Rahat100% (1)
- Chapter 6 - Induction Motors (Part1)Documento18 pagineChapter 6 - Induction Motors (Part1)SanjanaLakshmiNessuna valutazione finora
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocumento11 pagineSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- Induction MotorDocumento24 pagineInduction MotorAMAMA KHANNessuna valutazione finora
- Chapter 7 Induction Machines-EEE301Documento96 pagineChapter 7 Induction Machines-EEE301DilekNessuna valutazione finora
- Fuzzy Logic Control of Three Phase Induction Motor: A ReviewDocumento3 pagineFuzzy Logic Control of Three Phase Induction Motor: A ReviewInternational Journal of Innovative Science and Research Technology100% (1)
- Basic Parts of a Three Phase (3-Փ) Squirrel Cage Induction MotorDocumento2 pagineBasic Parts of a Three Phase (3-Փ) Squirrel Cage Induction Motoravandetq15Nessuna valutazione finora
- Hystersis Motor PDFDocumento15 pagineHystersis Motor PDFJohn BogyNessuna valutazione finora
- Angle / Exponential Modulation Lecture - 1: Dr. M. Venu Gopala Rao, Professor, Dept. of ECE, KL UniversityDocumento12 pagineAngle / Exponential Modulation Lecture - 1: Dr. M. Venu Gopala Rao, Professor, Dept. of ECE, KL Universitysurya tejaNessuna valutazione finora
- Identification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using MatlabDocumento51 pagineIdentification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using Matlabjagateesan50% (2)
- Mathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryDocumento10 pagineMathematical Modeling and Speed Torque Analysis of Three Phase Squirrel Cage Induction Motor Using Matlab Simulink For Electrical Machines LaboratoryjhonnydesaNessuna valutazione finora
- High-Speed Cmos Op-Amp Design TechniqueDocumento4 pagineHigh-Speed Cmos Op-Amp Design Techniquemax511894902Nessuna valutazione finora
- Hysteresis MotorDocumento27 pagineHysteresis MotorSubham GhoshNessuna valutazione finora
- 8051 Vs Motorola 68HC11Documento19 pagine8051 Vs Motorola 68HC11zuanne83Nessuna valutazione finora
- CNTLDocumento63 pagineCNTLShravan Kumar Namdeo100% (2)
- Ied Unit VDocumento8 pagineIed Unit VRudra Kumar MishraNessuna valutazione finora
- Automatic Load SharingDocumento41 pagineAutomatic Load SharingSaravanan ViswakarmaNessuna valutazione finora
- Lect 4,5,6,7 MOSFET Construction, Working Principle SND ChsrscteridticsDocumento26 pagineLect 4,5,6,7 MOSFET Construction, Working Principle SND Chsrscteridticsshashikala kotiNessuna valutazione finora
- Lab 4 Stepper Motor PDFDocumento10 pagineLab 4 Stepper Motor PDFIrfan HaiderNessuna valutazione finora
- Fuzzy Logic Control: Lect 5 Fuzzy Logic Control Basil Hamed Electrical Engineering Islamic University of GazaDocumento96 pagineFuzzy Logic Control: Lect 5 Fuzzy Logic Control Basil Hamed Electrical Engineering Islamic University of GazaFLOWERNessuna valutazione finora
- Diff BTWN MOSFET and BJTDocumento2 pagineDiff BTWN MOSFET and BJTMadan R HonnalagereNessuna valutazione finora
- Notes 1Documento68 pagineNotes 1Vo SantosNessuna valutazione finora
- Dac Interface To 8051 PDFDocumento4 pagineDac Interface To 8051 PDFRAVI100% (1)
- LED Lamp Dimmer CircuitDocumento3 pagineLED Lamp Dimmer CircuitashishNessuna valutazione finora
- Special - Electrical - Machines QBDocumento25 pagineSpecial - Electrical - Machines QBVel MuruganNessuna valutazione finora
- (Single+Three) Phase Induction Motors Interview Questions SetDocumento18 pagine(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNessuna valutazione finora
- Lab MachineDocumento9 pagineLab MachineAnonymous ryvoPIDNessuna valutazione finora
- FCS Lab2Documento36 pagineFCS Lab2muhammadNessuna valutazione finora
- Effect of Source InductanceDocumento25 pagineEffect of Source InductanceSriram Anil Kumar Gandham100% (1)
- Measurement of VelocityDocumento59 pagineMeasurement of VelocityYogeshBhatt100% (1)
- Transformer Tap ChangerDocumento2 pagineTransformer Tap ChangerIskeel Sadiq100% (1)
- Ferranti Effect and Skin EffectDocumento8 pagineFerranti Effect and Skin EffectMaaz KhanNessuna valutazione finora
- DTC PPTDocumento17 pagineDTC PPTmanoranjanottaNessuna valutazione finora
- Design of Electrical Machine Unit 1 2 MarksDocumento6 pagineDesign of Electrical Machine Unit 1 2 MarksVel MuruganNessuna valutazione finora
- EM 2 Lecture Notes Unit 1 2 3Documento103 pagineEM 2 Lecture Notes Unit 1 2 3M ranganNessuna valutazione finora
- Ac Series MotorDocumento15 pagineAc Series MotorMani Balaji TNessuna valutazione finora
- Speed Control of DC Motor by Various MethodsDocumento5 pagineSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRINessuna valutazione finora
- Auto Selection of Any Available PhaseDocumento16 pagineAuto Selection of Any Available PhaseRyan HarrisNessuna valutazione finora
- Power Systems Protection Course: Al-Balqa Applied UniversityDocumento37 paginePower Systems Protection Course: Al-Balqa Applied UniversityLimuel Espiritu100% (1)
- 16 Unit15Documento45 pagine16 Unit15ZULUNessuna valutazione finora
- Principles of Electrical Engineering Question BankDocumento8 paginePrinciples of Electrical Engineering Question BankUpender Rao SunkishalaNessuna valutazione finora
- VHDL Synchronous CountersDocumento28 pagineVHDL Synchronous CountersShanaka JayasekaraNessuna valutazione finora
- English (Transistor) : Jurusan Teknik Elektro Program Studi D-Iv Teknik Elektronika Politeknik Negeri Malang 2019Documento5 pagineEnglish (Transistor) : Jurusan Teknik Elektro Program Studi D-Iv Teknik Elektronika Politeknik Negeri Malang 2019Zulfikar Iannur AwwalNessuna valutazione finora
- Comparison TableDocumento3 pagineComparison TableRodriguez Villalobos NelsonNessuna valutazione finora
- 09-Wien Bridge Oscillator Using OpAmp PDFDocumento4 pagine09-Wien Bridge Oscillator Using OpAmp PDFVishesh Kumar SinghNessuna valutazione finora
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocumento21 pagineElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNessuna valutazione finora
- Energy MeterDocumento11 pagineEnergy MeterRushab SirsatNessuna valutazione finora
- CHAPTER 8 Induction MotorDocumento3 pagineCHAPTER 8 Induction MotorDhanashree ParanjapeNessuna valutazione finora
- Electrical Machines Final AssignmentDocumento13 pagineElectrical Machines Final Assignmentaamir.faiazNessuna valutazione finora
- Chapter 7-Induction Motors Part1 PDFDocumento18 pagineChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkNessuna valutazione finora
- Advantages and Disadvantages of Stepper MotorsDocumento1 paginaAdvantages and Disadvantages of Stepper MotorsSyuhadah RashidNessuna valutazione finora
- 3-5 Synchronous CondenserDocumento7 pagine3-5 Synchronous CondenserGustavo SouzaNessuna valutazione finora
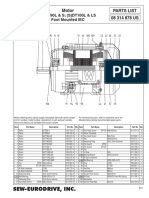
- Sew-Eurodrive, Inc.: MotorDocumento1 paginaSew-Eurodrive, Inc.: MotorcmaradiagaNessuna valutazione finora
- Catalog - IE5 SynRM Motors - 9AKK107743 en 12-2021Documento50 pagineCatalog - IE5 SynRM Motors - 9AKK107743 en 12-2021hadiNessuna valutazione finora
- 120 Top Most Single Phase Induction Motors PDFDocumento19 pagine120 Top Most Single Phase Induction Motors PDFArunabh BhattacharyaNessuna valutazione finora
- A Comparison of Power Density For Axial Flux Machines Based On General Purpose Sizing EquationsDocumento8 pagineA Comparison of Power Density For Axial Flux Machines Based On General Purpose Sizing EquationsaugustoNessuna valutazione finora
- Rotating Electrical Machine Lab: B.E. 5 SemesterDocumento33 pagineRotating Electrical Machine Lab: B.E. 5 SemesterSuma Rani GNessuna valutazione finora
- Electric Generator Class 12 ProjectDocumento24 pagineElectric Generator Class 12 ProjectDeepanshu VermaNessuna valutazione finora
- ENERCON - BrizuelaDocumento13 pagineENERCON - BrizuelaEzekiel Brizuela100% (1)
- 21EE44 Module 4Documento18 pagine21EE44 Module 4AshwiniNessuna valutazione finora
- Contact Less Excitation SystemDocumento5 pagineContact Less Excitation SystemSalih Ahmed ObeidNessuna valutazione finora
- Fractional Kilowatt MotorsDocumento37 pagineFractional Kilowatt MotorsPavan Kumar100% (1)
- Synchro, Servo, LVDT, StepperDocumento36 pagineSynchro, Servo, LVDT, StepperPuspal GhoshNessuna valutazione finora
- EEE 332 Test 2Documento3 pagineEEE 332 Test 2Jonathan ChilundaNessuna valutazione finora
- Basic Electrical Engineering - Synchronous GeneratorDocumento82 pagineBasic Electrical Engineering - Synchronous GeneratorlAntiherolNessuna valutazione finora
- IAM Unit 4 MCQDocumento4 pagineIAM Unit 4 MCQVishal SawantNessuna valutazione finora
- Contactors RelaysDocumento22 pagineContactors Relayspradnya sadigaleNessuna valutazione finora
- Valueline DatasheetDocumento2 pagineValueline DatasheetFabiola Moreno GarciaNessuna valutazione finora
- EP19209582NWA1Documento13 pagineEP19209582NWA1VAIBHAV36Nessuna valutazione finora
- 13.induction GeneratorsDocumento4 pagine13.induction Generatorsstruggle4418Nessuna valutazione finora
- EE8005 Special Electrical Machines A Course Material OnDocumento151 pagineEE8005 Special Electrical Machines A Course Material OnjoNessuna valutazione finora
- Protecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncDocumento12 pagineProtecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncproteccionesNessuna valutazione finora
- E2063 Teknologi Elektrik 2 UNIT0Documento11 pagineE2063 Teknologi Elektrik 2 UNIT0dbu2952Nessuna valutazione finora