Potrebbero piacerti anche
- HPhys Unit 01 Packet PDFDocumento14 pagineHPhys Unit 01 Packet PDFjbc929_billsNessuna valutazione finora
- Chapter 09Documento16 pagineChapter 09서승찬88% (8)
- CEE 271: Applied Mechanics II, Dynamics - Lecture 5: Ch.12, Sec.9Documento20 pagineCEE 271: Applied Mechanics II, Dynamics - Lecture 5: Ch.12, Sec.9abdsu75Nessuna valutazione finora
- Module 2 Motion of Systems of Particles v6Documento49 pagineModule 2 Motion of Systems of Particles v6Dyas FerNessuna valutazione finora
- Lec 2 CDocumento8 pagineLec 2 CSaad AhmadNessuna valutazione finora
- 4 Motion of Systems of Particles v67Documento52 pagine4 Motion of Systems of Particles v67Daniel TeñaNessuna valutazione finora
- Applied Mech PulleysDocumento59 pagineApplied Mech PulleysLekan OlaosebikanNessuna valutazione finora
- Dynamics: Kinematics of A ParticleDocumento46 pagineDynamics: Kinematics of A ParticleyahyaNessuna valutazione finora
- MENG233 - RIGID BODY DYNAMICS - WEEK 4 - Kinematics of Particles - Dependant MotionDocumento60 pagineMENG233 - RIGID BODY DYNAMICS - WEEK 4 - Kinematics of Particles - Dependant Motionمحمود البندارىNessuna valutazione finora
- Week 3Documento32 pagineWeek 3Alapple TanNessuna valutazione finora
- 12.5 Projectile MotionDocumento24 pagine12.5 Projectile Motionrainah ismailNessuna valutazione finora
- Introduction & Rectilinear Kinematics: Continuous Motion: Today's Objectives: In-Class ActivitiesDocumento18 pagineIntroduction & Rectilinear Kinematics: Continuous Motion: Today's Objectives: In-Class ActivitiesZuhairi ZakariaNessuna valutazione finora
- Motion of A Projectile: Today's ObjectivesDocumento25 pagineMotion of A Projectile: Today's ObjectivesNabihNessuna valutazione finora
- Chapter 2 Force Vector Part1Documento22 pagineChapter 2 Force Vector Part1Fiq DenNessuna valutazione finora
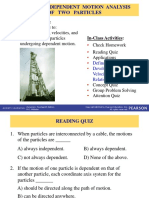
- Absolute Dependent Motion Analysis of Two Particles: Today's ObjectivesDocumento22 pagineAbsolute Dependent Motion Analysis of Two Particles: Today's ObjectivesAtef NazNessuna valutazione finora
- Mechanical Principles Outcome 4 - Mechanical Power Transmission Tutorial 3 - Linkage MechanismsDocumento11 pagineMechanical Principles Outcome 4 - Mechanical Power Transmission Tutorial 3 - Linkage MechanismscataiceNessuna valutazione finora
- Absolute Dependent Motion NotesDocumento26 pagineAbsolute Dependent Motion NotesYadana100% (1)
- Lecture Notes 6.1 - 6.3Documento22 pagineLecture Notes 6.1 - 6.3Hidayah KamaludinNessuna valutazione finora
- Kinematics of Particles - Part 3Documento16 pagineKinematics of Particles - Part 3125Jonwin Fidelis FamNessuna valutazione finora
- Engineering Mechanics: Dynamics in SI Units, 12e: Kinematics of A ParticleDocumento13 pagineEngineering Mechanics: Dynamics in SI Units, 12e: Kinematics of A ParticleBELAL ALSUBARINessuna valutazione finora
- Addition of Vectors PDFDocumento18 pagineAddition of Vectors PDFMariella Del RioNessuna valutazione finora
- Lecture Notes For Section 16-7Documento25 pagineLecture Notes For Section 16-7Joshua D'CruzNessuna valutazione finora
- Dynamics: Vector Mechanics For EngineersDocumento62 pagineDynamics: Vector Mechanics For EngineersAkatew Haile MebrahtuNessuna valutazione finora
- Engineering Dynamics 2020 Lecture 4Documento48 pagineEngineering Dynamics 2020 Lecture 4Muhammad ShessNessuna valutazione finora
- Dynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFDocumento31 pagineDynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFmanfredm6435Nessuna valutazione finora
- Working With Moving PulleysDocumento8 pagineWorking With Moving Pulleysnitesh004Nessuna valutazione finora
- Lecture Notes 6.4Documento14 pagineLecture Notes 6.4Yip Tuck WaiNessuna valutazione finora
- Week 3 - Equilibrium+FBDDocumento68 pagineWeek 3 - Equilibrium+FBDiwhy_Nessuna valutazione finora
- Dynamics Module 2Documento10 pagineDynamics Module 2Jed IsidtoNessuna valutazione finora
- AP Physics ReviewDocumento96 pagineAP Physics Reviewderekcal100% (6)
- Dynamics Class Notes Ch2 VI, VIIDocumento17 pagineDynamics Class Notes Ch2 VI, VIIAnkur GoyalNessuna valutazione finora
- 1 PDFDocumento31 pagine1 PDFhod meNessuna valutazione finora
- Dynamics: Absolute Dependent MotionDocumento23 pagineDynamics: Absolute Dependent Motionshaweeeng 101Nessuna valutazione finora
- Lecture Notes For Section 16-5-7 PDFDocumento26 pagineLecture Notes For Section 16-5-7 PDFgNessuna valutazione finora
- Statics-Joints and ReactionsDocumento18 pagineStatics-Joints and Reactionsbbbobo2002Nessuna valutazione finora
- Reletive MotionDocumento15 pagineReletive MotionMuhammad Awais Naveed AwanNessuna valutazione finora
- Motion in A Plane PDFDocumento18 pagineMotion in A Plane PDFRohitNessuna valutazione finora
- Homework 5 - Analysis of Indeterminate Structures - Flexibility (Force) Method - Part 2Documento4 pagineHomework 5 - Analysis of Indeterminate Structures - Flexibility (Force) Method - Part 2anthony mikhaelNessuna valutazione finora
- Lecture Notes For Section 13-4Documento21 pagineLecture Notes For Section 13-4Daniel HaiqalNessuna valutazione finora
- Lecture Notes 9.2Documento15 pagineLecture Notes 9.2Yip Tuck WaiNessuna valutazione finora
- T1 Ch1 KimPar Basic1 STDVDocumento6 pagineT1 Ch1 KimPar Basic1 STDVizzat razaliNessuna valutazione finora
- 16 5 Relative Acceleration PDFDocumento24 pagine16 5 Relative Acceleration PDFSindhu BabuNessuna valutazione finora
- Lecture Notes 5.5 - 5.7Documento20 pagineLecture Notes 5.5 - 5.7Yip Tuck WaiNessuna valutazione finora
- Chapter 12-Full (1) 5757Documento59 pagineChapter 12-Full (1) 5757Zoker_45Nessuna valutazione finora
- Eas Unit IiDocumento260 pagineEas Unit IiRekha ManideepNessuna valutazione finora
- Lecture Notes 2.9Documento16 pagineLecture Notes 2.9Aliph HamzahNessuna valutazione finora
- Working With Moving Pulleys 6 PDFDocumento8 pagineWorking With Moving Pulleys 6 PDFOyas DubeyNessuna valutazione finora
- Level I: Particle Kinematics - Fixed and Translating Frames (I, J, K)Documento5 pagineLevel I: Particle Kinematics - Fixed and Translating Frames (I, J, K)Zheng YongjiaNessuna valutazione finora
- Slope Deflection MethodDocumento9 pagineSlope Deflection MethodrwaidaabbasNessuna valutazione finora
- Dynamics: Vector Mechanics For EngineersDocumento38 pagineDynamics: Vector Mechanics For Engineersteo1285Nessuna valutazione finora
- Beam Analysis Using The Stiffness Method in MATLAB ProgramDocumento14 pagineBeam Analysis Using The Stiffness Method in MATLAB ProgramUpadesh Shrestha100% (3)
- 2d Kinematics of RbodyDocumento22 pagine2d Kinematics of RbodyNurul AsyilahNessuna valutazione finora
- Equilibrium of A Rigid Body: Today's ObjectivesDocumento16 pagineEquilibrium of A Rigid Body: Today's ObjectivesbesshoNessuna valutazione finora
- Slope Deflection MethodDocumento21 pagineSlope Deflection MethodDivya Ramdev100% (1)
- HabijabiDocumento21 pagineHabijabiTanvir Shahrier MahmudNessuna valutazione finora
- 12.3 Erratic MotionDocumento25 pagine12.3 Erratic Motionrainah ismailNessuna valutazione finora
- Dynamics: Vector Mechanics For EngineersDocumento20 pagineDynamics: Vector Mechanics For EngineersRamilvalmeoNessuna valutazione finora
- EM ECE Lab OutcomesDocumento5 pagineEM ECE Lab OutcomesKiran ChaudharyNessuna valutazione finora
- Planar Linkage Synthesis: A modern CAD based approachDa EverandPlanar Linkage Synthesis: A modern CAD based approachNessuna valutazione finora
- Barron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewDa EverandBarron's Physics Practice Plus: 400+ Online Questions and Quick Study ReviewNessuna valutazione finora
- A Complete Course in Physics ( Graphs ) - First EditionDa EverandA Complete Course in Physics ( Graphs ) - First EditionNessuna valutazione finora
- 557 2504 1 PBDocumento18 pagine557 2504 1 PBSyuhadah KhusainiNessuna valutazione finora
- EMG Sensor Research PaperDocumento18 pagineEMG Sensor Research PaperSyuhadah KhusainiNessuna valutazione finora
- Stonkusand RoyalarticleDocumento12 pagineStonkusand RoyalarticleSyuhadah KhusainiNessuna valutazione finora
- EMG Research PaperDocumento4 pagineEMG Research PaperSyuhadah KhusainiNessuna valutazione finora
- Emg Bkarlik 2014Documento7 pagineEmg Bkarlik 2014Syuhadah KhusainiNessuna valutazione finora
- (Morning / Afternoon Session) : Yearly Fee Price (RM)Documento1 pagina(Morning / Afternoon Session) : Yearly Fee Price (RM)Syuhadah KhusainiNessuna valutazione finora
- Courses List (For Lecturer) - Institute of Leadership and Development (ILD)Documento16 pagineCourses List (For Lecturer) - Institute of Leadership and Development (ILD)Syuhadah KhusainiNessuna valutazione finora
- Technical Report Ists - NSKDocumento6 pagineTechnical Report Ists - NSKSyuhadah KhusainiNessuna valutazione finora
- MEC600 Engineers in Society - CourseInfoDocumento4 pagineMEC600 Engineers in Society - CourseInfoSyuhadah KhusainiNessuna valutazione finora
- Lean Manufacturing Survey PaperDocumento5 pagineLean Manufacturing Survey PaperSyuhadah KhusainiNessuna valutazione finora
- Students' Perception Towards Quality Library Service Using Rasch Measurement ModelDocumento5 pagineStudents' Perception Towards Quality Library Service Using Rasch Measurement ModelSyuhadah KhusainiNessuna valutazione finora
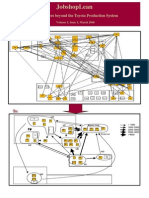
- Job Shop LeanDocumento29 pagineJob Shop LeanSyuhadah Khusaini100% (1)
- SuspensionDocumento12 pagineSuspensionvivek kumarNessuna valutazione finora
- Hunting in Synchronous Motor: Online Electrical EngineeringDocumento5 pagineHunting in Synchronous Motor: Online Electrical EngineeringSasi Kanth KolaNessuna valutazione finora
- 7,3 020ROUGS4 Chapter7 PavementDesign Part3Documento27 pagine7,3 020ROUGS4 Chapter7 PavementDesign Part3fadi eidNessuna valutazione finora
- AP Thermodynamics Study GuideDocumento2 pagineAP Thermodynamics Study Guideevil twinNessuna valutazione finora
- Pressure Loss CalculationsDocumento28 paginePressure Loss CalculationsAgus ManggalaNessuna valutazione finora
- Structural Analysis and Design Group: National Aerospace Laboratories, BangaloreDocumento1 paginaStructural Analysis and Design Group: National Aerospace Laboratories, Bangalorealagarg137691Nessuna valutazione finora
- Notes in Che 324 Prepared: Engr. Brenda T. Domingo Coloma, CheDocumento8 pagineNotes in Che 324 Prepared: Engr. Brenda T. Domingo Coloma, ChePaul Philip LabitoriaNessuna valutazione finora
- Huzayyin Ahmed A 201111 PHD ThesisDocumento113 pagineHuzayyin Ahmed A 201111 PHD ThesisHafiziAhmadNessuna valutazione finora
- CFD AssignmentDocumento15 pagineCFD AssignmentSatheesh KumarNessuna valutazione finora
- Module 5.2b: Gas Laws Part 2Documento26 pagineModule 5.2b: Gas Laws Part 2Ryan PazonNessuna valutazione finora
- Hydraulic JumpDocumento10 pagineHydraulic JumpnaeemNessuna valutazione finora
- Lecture 7 1 Mat FoundationDocumento39 pagineLecture 7 1 Mat FoundationDwayne Jemar Del RosarioNessuna valutazione finora
- Chapter 8 Continuous SystemDocumento128 pagineChapter 8 Continuous SystemsyamilNessuna valutazione finora
- MagnetismDocumento11 pagineMagnetismbaymaxNessuna valutazione finora
- Experiment - 4: Level Control in A Cylindrical Tank ProcessDocumento15 pagineExperiment - 4: Level Control in A Cylindrical Tank ProcessMilan PoudelNessuna valutazione finora
- Physics Problems WavesDocumento3 paginePhysics Problems WavesMalletNjonkemNessuna valutazione finora
- Fundamental Frequency TheoryDocumento9 pagineFundamental Frequency TheorytotalnjaNessuna valutazione finora
- Study of Simple Pendulum Using Tracker Video Analysis and High Speed Camera: An Interactive Approach To Analyze Oscillatory MotionDocumento10 pagineStudy of Simple Pendulum Using Tracker Video Analysis and High Speed Camera: An Interactive Approach To Analyze Oscillatory MotionShalini KulshresthaNessuna valutazione finora
- 2007 Liu. Steric Effect A Quantitative Description From Density Functional TheoryDocumento6 pagine2007 Liu. Steric Effect A Quantitative Description From Density Functional TheoryKarlos Lds NvNessuna valutazione finora
- Botogon - Center of MassDocumento6 pagineBotogon - Center of MassRhod Jayson RicaldeNessuna valutazione finora
- ACI 318-08 Ex002Documento4 pagineACI 318-08 Ex002Antonius AjalahNessuna valutazione finora
- Tzempelikos D. Et Al - Airflow Patterns in A Laboratory Batch-Type, Tray Air Dryer - Ic-Scce2012 - ProceedingsDocumento10 pagineTzempelikos D. Et Al - Airflow Patterns in A Laboratory Batch-Type, Tray Air Dryer - Ic-Scce2012 - ProceedingsAndronikos FiliosNessuna valutazione finora
- Department of Civil Engineering, IIT Madras, ChennaiDocumento2 pagineDepartment of Civil Engineering, IIT Madras, ChennaiAnonymous C3bCbLBfOaNessuna valutazione finora
- Indian Codes - Concrete Design PerDocumento7 pagineIndian Codes - Concrete Design Peribrahim100% (1)
- University of BaghdadDocumento13 pagineUniversity of BaghdadDiyar NezarNessuna valutazione finora
- TD NotesDocumento147 pagineTD NotesThi KumarNessuna valutazione finora
- Unit-4-Computer Aided DesignDocumento15 pagineUnit-4-Computer Aided DesignMuthuvel M100% (2)