Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- 51 Sex Nerd Sex Tips Emily NagoskiDocumento56 pagine51 Sex Nerd Sex Tips Emily Nagoskiskasner80% (5)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- BONENT Candidate Handbook PDFDocumento28 pagineBONENT Candidate Handbook PDFParshanwa Johnson100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Color Theory PDFDocumento41 pagineColor Theory PDFJashid Pk100% (1)
- Character QuestionsDocumento3 pagineCharacter QuestionsAaron FarmerNessuna valutazione finora
- Design and Control of Concrete Mixtures, 14th EdDocumento360 pagineDesign and Control of Concrete Mixtures, 14th Edelnazeer100% (12)
- Interweave Fiber Catalog Fall 2009Documento56 pagineInterweave Fiber Catalog Fall 2009Interweave100% (1)
- AWS Lecture NotesDocumento4 pagineAWS Lecture NotesAsad Bin Ala Qatari0% (1)
- SpecificationsDocumento96 pagineSpecificationsAgustino WaitihacheNessuna valutazione finora
- Rizal and The Theory of NationalismDocumento37 pagineRizal and The Theory of NationalismLiza Betua Sotelo78% (58)
- RWB 60-856 Inst - Op. Mantto.Documento52 pagineRWB 60-856 Inst - Op. Mantto.Daniel Dennis Escobar Subirana100% (1)
- MUMBAI ConsultantsDocumento43 pagineMUMBAI ConsultantsER RaviNessuna valutazione finora
- Lecture 6 - Time ManagementDocumento38 pagineLecture 6 - Time ManagementAgustino WaitihacheNessuna valutazione finora
- tipsPREVIEW2 PDFDocumento13 paginetipsPREVIEW2 PDFBaljinder SinghNessuna valutazione finora
- tipsPREVIEW2 PDFDocumento13 paginetipsPREVIEW2 PDFBaljinder SinghNessuna valutazione finora
- ZXDC48 FB101 Lithium-Ion Battery User Manual V1.0Documento43 pagineZXDC48 FB101 Lithium-Ion Battery User Manual V1.0Luis Cruz96% (24)
- 02.03.05.06.01 - Manage Sales Rebate AgreementDocumento11 pagine02.03.05.06.01 - Manage Sales Rebate AgreementVinoth100% (1)
- BTCPH Seleted ListDocumento2 pagineBTCPH Seleted ListAgustino WaitihacheNessuna valutazione finora
- Tender Notice General 2022Documento8 pagineTender Notice General 2022Agustino WaitihacheNessuna valutazione finora
- Tanzania Second Phase of Productive Social Safety Net ProjectDocumento125 pagineTanzania Second Phase of Productive Social Safety Net ProjectAgustino WaitihacheNessuna valutazione finora
- Innocent Bashungwa CV - 2022Documento2 pagineInnocent Bashungwa CV - 2022Agustino WaitihacheNessuna valutazione finora
- Tzaffairs 50Documento40 pagineTzaffairs 50Agustino WaitihacheNessuna valutazione finora
- 4.1 Tanzania Government Contact ListDocumento3 pagine4.1 Tanzania Government Contact Listgrace WarrenNessuna valutazione finora
- Advert - Monitoring OfficerDocumento2 pagineAdvert - Monitoring OfficerAgustino WaitihacheNessuna valutazione finora
- Love Sex Life Booklet Non Printing PDFDocumento27 pagineLove Sex Life Booklet Non Printing PDFAli HasanNessuna valutazione finora
- My Body: BelongsDocumento30 pagineMy Body: BelongsAgustino WaitihacheNessuna valutazione finora
- 4 5931750225512236574 PDFDocumento25 pagine4 5931750225512236574 PDFAgustino WaitihacheNessuna valutazione finora
- Tanya Bass, MS, CHES: Your Name HereDocumento5 pagineTanya Bass, MS, CHES: Your Name Hereminu21Nessuna valutazione finora
- Lighting Program For Small Roaster FlocksDocumento3 pagineLighting Program For Small Roaster FlocksAgustino WaitihacheNessuna valutazione finora
- Modeling and Rendering Interior DesignDocumento20 pagineModeling and Rendering Interior DesignAgustino WaitihacheNessuna valutazione finora
- My First Project Chapters PDFDocumento47 pagineMy First Project Chapters PDFAgustino WaitihacheNessuna valutazione finora
- MawallaDocumento77 pagineMawallaAgustino WaitihacheNessuna valutazione finora
- Modeling and Rendering Interior DesignDocumento20 pagineModeling and Rendering Interior DesignAgustino WaitihacheNessuna valutazione finora
- Lecture 6 Time Management 1Documento4 pagineLecture 6 Time Management 1Agustino WaitihacheNessuna valutazione finora
- 03a EvaporationDocumento39 pagine03a EvaporationAgustino WaitihacheNessuna valutazione finora
- 4.3 Periodic Forcing Function 4.3.1 Fourier SeriesDocumento20 pagine4.3 Periodic Forcing Function 4.3.1 Fourier SeriesAgustino WaitihacheNessuna valutazione finora
- Lecture 1&2Documento37 pagineLecture 1&2Agustino WaitihacheNessuna valutazione finora
- 01 IntroductionDocumento54 pagine01 IntroductionAgustino WaitihacheNessuna valutazione finora
- 02 PrecipitationDocumento77 pagine02 PrecipitationAgustino WaitihacheNessuna valutazione finora
- EPAL TRW EPAL2 2edition Section2 Part2 GBDocumento45 pagineEPAL TRW EPAL2 2edition Section2 Part2 GBGabriele AsnaghiNessuna valutazione finora
- Comparisons YouTrackDocumento13 pagineComparisons YouTrackMihai DanielNessuna valutazione finora
- Report On Mango Cultivation ProjectDocumento40 pagineReport On Mango Cultivation Projectkmilind007100% (1)
- Psyc 1100 Research ExperimentDocumento10 paginePsyc 1100 Research Experimentapi-242343747Nessuna valutazione finora
- Materi 2 - Obligation, Prohibition, and Suggestion - AdviceDocumento12 pagineMateri 2 - Obligation, Prohibition, and Suggestion - AdviceShadrina ChaerunissaNessuna valutazione finora
- 01 Agile Challenge-Does Anyone Have A PencilDocumento13 pagine01 Agile Challenge-Does Anyone Have A PencilAbhisek MukherjeeNessuna valutazione finora
- Learning Activity Sheet in Science-9: Week 7-Quarter 3Documento5 pagineLearning Activity Sheet in Science-9: Week 7-Quarter 3theinvaderNessuna valutazione finora
- Service Manual PDFDocumento479 pagineService Manual PDFanon_630608900Nessuna valutazione finora
- Excel Tips Tricks e-BookV1.1 PDFDocumento20 pagineExcel Tips Tricks e-BookV1.1 PDFSulabhNessuna valutazione finora
- Course Syllabus Template For BSED 1Documento2 pagineCourse Syllabus Template For BSED 1Rosalyn MauricioNessuna valutazione finora
- Control System Engineering: Topic Block Diagram RepresentationDocumento24 pagineControl System Engineering: Topic Block Diagram RepresentationWaqas AfzalNessuna valutazione finora
- Aircraft Tyre Maintenance - SKYbrary Aviation SafetyDocumento8 pagineAircraft Tyre Maintenance - SKYbrary Aviation Safetynosh1983Nessuna valutazione finora
- Preparation of Giemsa Working SolutionDocumento4 paginePreparation of Giemsa Working SolutionMUHAMMAD DIMAS YUSUF 1903031Nessuna valutazione finora
- Semiconductor Application Library ManualDocumento494 pagineSemiconductor Application Library ManualValerioApicellaNessuna valutazione finora
- Philosophical Warfare and The Shadow of IdeasDocumento5 paginePhilosophical Warfare and The Shadow of IdeasDavid MetcalfeNessuna valutazione finora
- JSEA - Hydro Test - 2833Documento13 pagineJSEA - Hydro Test - 2833Amit Sharma100% (1)
- Arguments and FallaciesDocumento18 pagineArguments and FallaciesSarah Mae Peñaflor Baldon-IlaganNessuna valutazione finora
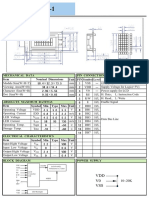
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDocumento1 paginaV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNessuna valutazione finora
- 11 SortingDocumento131 pagine11 SortingTran Nhat MinhNessuna valutazione finora
- Sepction - 3Documento3 pagineSepction - 3k koradiaNessuna valutazione finora
- 3 Master Star 1 Super Star: Forged Steel Ball ValvesDocumento7 pagine3 Master Star 1 Super Star: Forged Steel Ball ValvesAhmed IbrahimNessuna valutazione finora