Potrebbero piacerti anche
- Sets, Relation & Function: Must Know Points Should Know PointsDocumento3 pagineSets, Relation & Function: Must Know Points Should Know PointsjcspaiNessuna valutazione finora
- Three Days Workshop - Outcome Based EducationDocumento261 pagineThree Days Workshop - Outcome Based Educationpro_naveenNessuna valutazione finora
- Safety and Security of Children in SchoolsDocumento89 pagineSafety and Security of Children in SchoolsjcspaiNessuna valutazione finora
- Dweck Walton Cohen 2014 PDFDocumento43 pagineDweck Walton Cohen 2014 PDFDennis ImNessuna valutazione finora
- Points of NBADocumento2 paginePoints of NBABaljeet Singh Sinwar100% (1)
- Finite Elements Course IntroductionDocumento82 pagineFinite Elements Course IntroductionjcspaiNessuna valutazione finora
- Daily Check TestDocumento6 pagineDaily Check TestjcspaiNessuna valutazione finora
- Army 1Documento14 pagineArmy 1jcspaiNessuna valutazione finora
- Examcafe CADCAManswersDocumento8 pagineExamcafe CADCAManswersmayur_mechNessuna valutazione finora
- Catia V5: DR Ahmed KovacevicDocumento60 pagineCatia V5: DR Ahmed KovacevicYunus YanarNessuna valutazione finora
- White Paper I So 37001Documento8 pagineWhite Paper I So 37001jcspai100% (1)
- Catalogue Taiwan RobotDocumento46 pagineCatalogue Taiwan RobotjcspaiNessuna valutazione finora
- Computer Aided Design (CAD) : 18-1 IntroductionDocumento3 pagineComputer Aided Design (CAD) : 18-1 IntroductionTayyab AwanNessuna valutazione finora
- Maruti GuidelinesDocumento3 pagineMaruti GuidelinesjcspaiNessuna valutazione finora
- Pptoncatia 150906151126 Lva1 App6891Documento20 paginePptoncatia 150906151126 Lva1 App6891AmexTesfayeKoraNessuna valutazione finora
- Directorate of Technical Education: Organized byDocumento33 pagineDirectorate of Technical Education: Organized byjcspaiNessuna valutazione finora
- Student Placement Evaluation Form AMU AligarhDocumento2 pagineStudent Placement Evaluation Form AMU AligarhjcspaiNessuna valutazione finora
- Energise Enable InvolveDocumento30 pagineEnergise Enable InvolvetoniNessuna valutazione finora
- Air Force Common Admission Test (Afcat) : Scheme of Syllabus & Example of QuestionsDocumento6 pagineAir Force Common Admission Test (Afcat) : Scheme of Syllabus & Example of QuestionsUma ShankarNessuna valutazione finora
- ChallengesDocumento1 paginaChallengesjcspaiNessuna valutazione finora
- NBA - Status & Action ReportDocumento9 pagineNBA - Status & Action ReportjcspaiNessuna valutazione finora
- Tariff of Internet Leased Line ServicesDocumento1 paginaTariff of Internet Leased Line ServicesjcspaiNessuna valutazione finora
- Nashik Profile PDFDocumento33 pagineNashik Profile PDFsusegaad100% (1)
- Assignment No.: 02: Take This Assignment From Mr. Pai and Give That Assignment To StudentsDocumento1 paginaAssignment No.: 02: Take This Assignment From Mr. Pai and Give That Assignment To StudentsjcspaiNessuna valutazione finora
- Pre Final Yr Database UgDocumento1 paginaPre Final Yr Database UgjcspaiNessuna valutazione finora
- Biodata Format For Job ApplicationDocumento4 pagineBiodata Format For Job ApplicationjcspaiNessuna valutazione finora
- Jayesh C S PaiDocumento54 pagineJayesh C S PaijcspaiNessuna valutazione finora
- Six New Strategies for Taiwan's Productivity 4.0 TransformationDocumento30 pagineSix New Strategies for Taiwan's Productivity 4.0 TransformationjcspaiNessuna valutazione finora
- The Crowdsourced Guide To LearningDocumento57 pagineThe Crowdsourced Guide To LearningCarlos NuñezNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hikvision PanoVu DS-2DP0818Z-D 8MP Panoramic + PTZ CameraDocumento5 pagineHikvision PanoVu DS-2DP0818Z-D 8MP Panoramic + PTZ CameraMarkoNessuna valutazione finora
- Arduino Color Sensing Tutorial - TCS230 TCS3200 Color Sensor - HowToMechatronicsDocumento34 pagineArduino Color Sensing Tutorial - TCS230 TCS3200 Color Sensor - HowToMechatronicsKlew Cleudiney Theodoro BrandãoNessuna valutazione finora
- X TMF Gf100 Series MFC EngDocumento82 pagineX TMF Gf100 Series MFC EngMel LakeNessuna valutazione finora
- Sensor-Based Dike Monitoring System For Coastal Dikes.Documento14 pagineSensor-Based Dike Monitoring System For Coastal Dikes.priyanka choudharyNessuna valutazione finora
- 76.multi Sensor-Smoke, Fire, Temperature, Gas, Metal and Intruder Based Security Robot Using ZigbeeDocumento4 pagine76.multi Sensor-Smoke, Fire, Temperature, Gas, Metal and Intruder Based Security Robot Using ZigbeeAnil Kumar0% (2)
- Ieee Nems 2010 Accepted PapersDocumento24 pagineIeee Nems 2010 Accepted PapersvieffejonesNessuna valutazione finora
- Mechatronics Module 4: Sensors and ActuatorsDocumento23 pagineMechatronics Module 4: Sensors and ActuatorsCharles AbrahamNessuna valutazione finora
- Flowcode 7 Component CreationDocumento9 pagineFlowcode 7 Component CreationNowan HatsenNessuna valutazione finora
- Die Protection ClinicDocumento82 pagineDie Protection ClinicMario FaridNessuna valutazione finora
- EK280Documento4 pagineEK280mmilovanmNessuna valutazione finora
- Volvo Dtcs EbsDocumento48 pagineVolvo Dtcs EbsJj0% (1)
- Automatic Musical Water FoundationDocumento6 pagineAutomatic Musical Water FoundationVickyNessuna valutazione finora
- Simulation ThesisDocumento49 pagineSimulation ThesisEdzudy ZaibidinNessuna valutazione finora
- Industrial Pressure and Vacuum Switches: 9012G, 9016G, and XMLA, B, C, DDocumento104 pagineIndustrial Pressure and Vacuum Switches: 9012G, 9016G, and XMLA, B, C, DJohn KingNessuna valutazione finora
- Sensor de Borde UltrasonicoDocumento10 pagineSensor de Borde Ultrasonicojose mondacaNessuna valutazione finora
- Schneider Electric XUB0BPSNL2 DatasheetDocumento2 pagineSchneider Electric XUB0BPSNL2 DatasheetFouad NadjiNessuna valutazione finora
- Manual Partes DGCD Con DetectorDocumento64 pagineManual Partes DGCD Con Detectorluis alvarezNessuna valutazione finora
- Isuzu Engine Diagnostics PDFDocumento2 pagineIsuzu Engine Diagnostics PDFอิสรัตน์ สังฆะมะณีNessuna valutazione finora
- Accessories - TRAMIGO - ONE - PAGERSDocumento1 paginaAccessories - TRAMIGO - ONE - PAGERSleandro barbosaNessuna valutazione finora
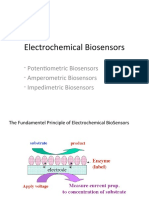
- Electrochemical Biosensors: - Potentiometric Biosensors - Amperometric Biosensors - Impedimetric BiosensorsDocumento18 pagineElectrochemical Biosensors: - Potentiometric Biosensors - Amperometric Biosensors - Impedimetric BiosensorsutkuyavuzNessuna valutazione finora
- Zero Speed SwitchDocumento4 pagineZero Speed SwitchmotherfcrNessuna valutazione finora
- Optex Vibro DatasheetDocumento2 pagineOptex Vibro DatasheetGabriel ChiriacNessuna valutazione finora
- A5e00053276 04us Ds3paDocumento152 pagineA5e00053276 04us Ds3paJulio Cesar Hernandez TrujilloNessuna valutazione finora
- Covec F PDFDocumento22 pagineCovec F PDFVictor MontesdeocaNessuna valutazione finora
- Smart Helmet for Safety and Accident Detection using IOTDocumento3 pagineSmart Helmet for Safety and Accident Detection using IOTAbdul RazzakNessuna valutazione finora
- Sequentronic Automated Manual Transmission (SEQ), FunctionDocumento1 paginaSequentronic Automated Manual Transmission (SEQ), FunctionLiviu Neda0% (2)
- MEMS CantileverDocumento86 pagineMEMS CantileverkumargpalaniNessuna valutazione finora
- Alarms and Fault Finding: FOPX Separation SystemDocumento36 pagineAlarms and Fault Finding: FOPX Separation SystemMohammad Jahid Alam100% (4)
- Analytical Instrumentation: Mrs Jolly SutariaDocumento24 pagineAnalytical Instrumentation: Mrs Jolly Sutariaurvish_soniNessuna valutazione finora
- IoT Based Environmental Monitoring Syste PDFDocumento8 pagineIoT Based Environmental Monitoring Syste PDFralphNessuna valutazione finora