Potrebbero piacerti anche
- Chapter 9 ChangDocumento37 pagineChapter 9 Changsatya sagarNessuna valutazione finora
- Plate Thumb Print Report ExampleDocumento4 paginePlate Thumb Print Report ExampleAnuradha SivakumarNessuna valutazione finora
- Steel - Incomplete PenetrationDocumento32 pagineSteel - Incomplete PenetrationAhora Con Todo PepitoNessuna valutazione finora
- OmniScan MXU MDocumento4 pagineOmniScan MXU MJulián Méndez TorresNessuna valutazione finora
- Steel - Faults at Junction of SeamsDocumento6 pagineSteel - Faults at Junction of SeamsAhora Con Todo PepitoNessuna valutazione finora
- Steel - Lack of FusionDocumento6 pagineSteel - Lack of FusionJose ContrerasNessuna valutazione finora
- Cswip 31 Practical PDFDocumento4 pagineCswip 31 Practical PDFJigar PrajapatiNessuna valutazione finora
- Noor Al-Salehi - Basic Electronics Components and CircuitsDocumento22 pagineNoor Al-Salehi - Basic Electronics Components and Circuitsapi-525647046Nessuna valutazione finora
- Controller PrincipleDocumento24 pagineController PrinciplePortia ShilengeNessuna valutazione finora
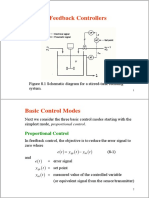
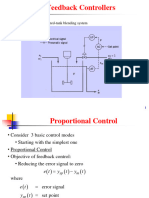
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDocumento24 pagineFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNessuna valutazione finora
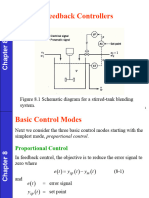
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocumento18 pagineFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNessuna valutazione finora
- Chapter 8Documento31 pagineChapter 8fosterNessuna valutazione finora
- Process Dynamics and Control: Chapter 8 LecturesDocumento33 pagineProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNessuna valutazione finora
- Feedback Controllers: Proportional ControlDocumento14 pagineFeedback Controllers: Proportional Control李承家Nessuna valutazione finora
- Chapter 8 - Feedback ControllerDocumento35 pagineChapter 8 - Feedback ControllerFakhrulShahrilEzanieNessuna valutazione finora
- ControllersDocumento32 pagineControllersEric KamauNessuna valutazione finora
- Introduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocumento32 pagineIntroduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwandaswkNessuna valutazione finora
- ERT 321 Process Control & Dynamics: Feedback ControllersDocumento34 pagineERT 321 Process Control & Dynamics: Feedback Controllershakita86Nessuna valutazione finora
- Week 9Documento21 pagineWeek 9candan.erkenNessuna valutazione finora
- Chapter 7 - Feedback ControllersDocumento44 pagineChapter 7 - Feedback ControllersPravin Nair50% (2)
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocumento42 pagineFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNessuna valutazione finora
- PID ControlDocumento56 paginePID ControlSyafRizal100% (1)
- Control SystemDocumento48 pagineControl SystemOlawale John AdeotiNessuna valutazione finora
- InTech-Pid Control TheoryDocumento17 pagineInTech-Pid Control TheoryAbner BezerraNessuna valutazione finora
- PID Control TheoryDocumento17 paginePID Control TheoryManuel Santos MNessuna valutazione finora
- Pid Control ch8 PDFDocumento22 paginePid Control ch8 PDFGholamreza IlkhaniNessuna valutazione finora
- Starting: Chapter 7: PID ControlDocumento13 pagineStarting: Chapter 7: PID ControlKishodarran Rajendran KicchoNessuna valutazione finora
- 4 Transfer FunctionDocumento22 pagine4 Transfer FunctionSalihin FhooziNessuna valutazione finora
- Finn Haugen. Telemark University College National Instruments ConfidentialDocumento27 pagineFinn Haugen. Telemark University College National Instruments ConfidentialtriplbingaziNessuna valutazione finora
- Controller DesignDocumento253 pagineController DesignymvbnNessuna valutazione finora
- Week 10-Feedback ControlDocumento34 pagineWeek 10-Feedback ControlMohd Aizad100% (1)
- Week 2Documento13 pagineWeek 2Abdinasir AliNessuna valutazione finora
- L-14 (SS) (Iac) ( (Ee) Nptel)Documento10 pagineL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNessuna valutazione finora
- Pid Controller: Ashok.S 500017496 M.Tech Pde R670211016Documento40 paginePid Controller: Ashok.S 500017496 M.Tech Pde R670211016Ashik Jacob Oommen100% (1)
- Chapter 8Documento35 pagineChapter 8satishNessuna valutazione finora
- Proportional-Integral-Derivative (PID) Control: Velocity ResponseDocumento34 pagineProportional-Integral-Derivative (PID) Control: Velocity ResponseFadi AlbatshNessuna valutazione finora
- PID Control Tuning Methods and Intro To NonlinearDocumento36 paginePID Control Tuning Methods and Intro To NonlinearKuanysh YessenzhanovNessuna valutazione finora
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocumento39 paginePlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyNessuna valutazione finora
- Week 12 - Control SystemDocumento30 pagineWeek 12 - Control SystemAzizan Anuar100% (1)
- Control System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlDocumento41 pagineControl System-Ii Lab File: Bachelor of Engineering (Division of Instrumentation & ControlParas SinghNessuna valutazione finora
- Chap 08 Marlin 2002Documento37 pagineChap 08 Marlin 2002Audrey Patrick KallaNessuna valutazione finora
- Application Note AN2208: Universal PID-ThermoregulatorDocumento17 pagineApplication Note AN2208: Universal PID-ThermoregulatorJ Daniel PichardoNessuna valutazione finora
- Feedback Controller: Proportional, Integral, Derivative (PID)Documento34 pagineFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- P, I, D, PI, PD, and PID ControlDocumento14 pagineP, I, D, PI, PD, and PID ControlArnav KothiyalNessuna valutazione finora
- Experiment 10Documento2 pagineExperiment 10kalidindi chandrasekharNessuna valutazione finora
- DR20Documento136 pagineDR20Daryl Asto MercadoNessuna valutazione finora
- Control StrategyDocumento44 pagineControl StrategyAyunie FazlinNessuna valutazione finora
- Task2 1 Specific Training-EnDocumento35 pagineTask2 1 Specific Training-EnSantiago LarrazNessuna valutazione finora
- Zieglar Nichols MethodDocumento7 pagineZieglar Nichols MethodVinay RajeshNessuna valutazione finora
- EE 322 Control TheoryDocumento37 pagineEE 322 Control TheoryshrnbolonneNessuna valutazione finora
- Presentation For ControllerDocumento42 paginePresentation For ControllerAlakshendra JohariNessuna valutazione finora
- EE448 Lec3 ControlTechniques 2014Documento25 pagineEE448 Lec3 ControlTechniques 2014scotgunnerNessuna valutazione finora
- Lab 7 Pid ControlDocumento6 pagineLab 7 Pid ControlFatin FarehahNessuna valutazione finora
- Priprema Za Ispit 2Documento8 paginePriprema Za Ispit 2Aleksandar MicicNessuna valutazione finora
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocumento41 pagine5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNessuna valutazione finora
- 20 THDocumento28 pagine20 THujjwal kumarNessuna valutazione finora
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDocumento18 pagineExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiNessuna valutazione finora
- Auto Loops TVNLDocumento144 pagineAuto Loops TVNLRajeevAgrawalNessuna valutazione finora
- 9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsDocumento9 pagine9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsChandrasekar ElankannanNessuna valutazione finora
- Project Based Learning IcsDocumento14 pagineProject Based Learning IcsAvinash YadavNessuna valutazione finora
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocumento53 pagineControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNessuna valutazione finora
- Chapter 11 Chang.2Documento39 pagineChapter 11 Chang.2satya sagarNessuna valutazione finora
- Controller Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID ControllersDocumento66 pagineController Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID Controllerssatya sagarNessuna valutazione finora
- Chapter 11 Chang.1Documento34 pagineChapter 11 Chang.1satya sagarNessuna valutazione finora
- Development of Empirical Dynamic Models From Step Response DataDocumento23 pagineDevelopment of Empirical Dynamic Models From Step Response Datasatya sagarNessuna valutazione finora
- Mass Pharma Form-7 Items PDFDocumento11 pagineMass Pharma Form-7 Items PDFAsif HanifNessuna valutazione finora
- THEY WOULD BE GODS (Chapter 24 - The Serpent and The Tree of Knowledge)Documento5 pagineTHEY WOULD BE GODS (Chapter 24 - The Serpent and The Tree of Knowledge)Anthony Forwood100% (3)
- Trainer - and Trainee-Centered StrategiesDocumento6 pagineTrainer - and Trainee-Centered StrategiesAlwyn LauNessuna valutazione finora
- Prabuddha Bharata September 2014Documento55 paginePrabuddha Bharata September 2014Swami NarasimhanandaNessuna valutazione finora
- Jacques Derrida Voice and Phenomenon Introduction To The Problem of The Sign in Husserls PhenomenologyDocumento157 pagineJacques Derrida Voice and Phenomenon Introduction To The Problem of The Sign in Husserls PhenomenologyKeiji Kunigami100% (1)
- Industrial Attachment ReportDocumento82 pagineIndustrial Attachment ReportNiyibizi Promesse100% (9)
- Cost Comp - MF UF Vs TraditionalDocumento8 pagineCost Comp - MF UF Vs TraditionalahanraNessuna valutazione finora
- SOCIOLOGY STRATEGY - Rank 63, Tanai Sultania, CSE - 2016 - INSIGHTS PDFDocumento4 pagineSOCIOLOGY STRATEGY - Rank 63, Tanai Sultania, CSE - 2016 - INSIGHTS PDFmaniNessuna valutazione finora
- Using The Developer Console To Execute Apex CodeDocumento5 pagineUsing The Developer Console To Execute Apex Codeksr131Nessuna valutazione finora
- Arab Literature Lesson PlanDocumento5 pagineArab Literature Lesson PlanMary Ann Sebial ManceraNessuna valutazione finora
- Application Satellite Image in Mineral ExplorationDocumento17 pagineApplication Satellite Image in Mineral ExplorationHifdzulFikriNessuna valutazione finora
- Itexamguide: High-Quality It Cert Exam Study GuideDocumento7 pagineItexamguide: High-Quality It Cert Exam Study GuideSaira KhanNessuna valutazione finora
- Affective Encounters ProceedingsDocumento296 pagineAffective Encounters ProceedingsJoe RigbyNessuna valutazione finora
- Mech Engg DrawingDocumento6 pagineMech Engg Drawing22hubNessuna valutazione finora
- Intuitiveinvesting:: Remote Viewing & Applications To Financial MarketsDocumento4 pagineIntuitiveinvesting:: Remote Viewing & Applications To Financial Marketsmiszka01Nessuna valutazione finora
- Analysis of The Trollaukin Bind.Documento6 pagineAnalysis of The Trollaukin Bind.EdwardNessuna valutazione finora
- A10 0250 (Rev. H 2000.09) EN - TECHNICAL SPECIFICATIONS SAFETY - REGULATION DEFINITION - PRESENTATIONDocumento9 pagineA10 0250 (Rev. H 2000.09) EN - TECHNICAL SPECIFICATIONS SAFETY - REGULATION DEFINITION - PRESENTATIONDiego CamargoNessuna valutazione finora
- 01 IntroductionDocumento26 pagine01 IntroductionDaniel CrashOverride ShaferNessuna valutazione finora
- Team Conflict ResolutionsDocumento5 pagineTeam Conflict Resolutionsmans2014Nessuna valutazione finora
- Change or Die - DessyDocumento43 pagineChange or Die - DessyZulkifli MansurNessuna valutazione finora
- QuestionnaireDocumento3 pagineQuestionnaireUzma KhanamNessuna valutazione finora
- Research PaperDocumento154 pagineResearch Paperleo lokeshNessuna valutazione finora
- I2E ReportDocumento15 pagineI2E Reportrag2604756437Nessuna valutazione finora
- Internship Report Gloria (Repaired)Documento24 pagineInternship Report Gloria (Repaired)Lynn LucyNessuna valutazione finora
- RRL ResearchDocumento4 pagineRRL ResearchRamel PaglanganNessuna valutazione finora
- Metodologi of NIEDocumento21 pagineMetodologi of NIEStevanus Gabriel PierreNessuna valutazione finora
- BGP Vibroseis Acquisition TechniquesDocumento4 pagineBGP Vibroseis Acquisition TechniquesMustapha ChettouhNessuna valutazione finora
- Acta Scientiarum. Biological Sciences 1679-9283: Issn: Eduem@Documento12 pagineActa Scientiarum. Biological Sciences 1679-9283: Issn: Eduem@paco jonesNessuna valutazione finora
- Configuring NIS Services in LinuxDocumento8 pagineConfiguring NIS Services in Linuxapi-3736383100% (1)