Potrebbero piacerti anche
- F 14 A - 2002Documento237 pagineF 14 A - 2002Vinicius100% (1)
- Altimatic Iiic Service ManualDocumento239 pagineAltimatic Iiic Service ManualDRAGONFLYDF63% (8)
- Emergency Release Coupling: For Marine Loading ArmDocumento11 pagineEmergency Release Coupling: For Marine Loading ArmShamsul Azhar SulaimanNessuna valutazione finora
- Industrial DrivesDocumento1 paginaIndustrial DrivesSatish NurukurthiNessuna valutazione finora
- NK Sir Support Resistance Code For TradingviewDocumento2 pagineNK Sir Support Resistance Code For TradingviewKrunal BhosaleNessuna valutazione finora
- Induction Motors Unit 3Documento26 pagineInduction Motors Unit 3babu KaroliNessuna valutazione finora
- 3phase Induction Motor (Sukhpreet)Documento17 pagine3phase Induction Motor (Sukhpreet)Ankesh KunwarNessuna valutazione finora
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Documento17 pagineBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargNessuna valutazione finora
- Stepper IntroDocumento60 pagineStepper IntroAshok More100% (1)
- Power Electronics Lab Manual1Documento72 paginePower Electronics Lab Manual1Harish SvNessuna valutazione finora
- Elevator World SemaracDocumento5 pagineElevator World SemaracSEMARAC100% (3)
- AC DC DrivesDocumento13 pagineAC DC Drives322399mk7086Nessuna valutazione finora
- Dcmotors and Their RepresentationDocumento61 pagineDcmotors and Their RepresentationSoeprapto AtmariNessuna valutazione finora
- PSIM MANUAL For StudentsDocumento23 paginePSIM MANUAL For StudentsSomnath Khamaru75% (4)
- RF Product Selector GuideDocumento49 pagineRF Product Selector GuideZamir HussainNessuna valutazione finora
- Solid State Control of Synchronous Motor & PMSMDocumento42 pagineSolid State Control of Synchronous Motor & PMSMNitish50% (2)
- Doku Comfort-2014 enDocumento10 pagineDoku Comfort-2014 enzli_zumbulNessuna valutazione finora
- Synchronous Motor AC DrivesDocumento40 pagineSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Diesel GeneratorDocumento15 pagineDiesel Generatorkarthik raju0% (1)
- LP 4 Mesin - Muhamad Alan Wardhika - 202011360Documento17 pagineLP 4 Mesin - Muhamad Alan Wardhika - 202011360sintiaNessuna valutazione finora
- Ac Voltage Controller PDFDocumento36 pagineAc Voltage Controller PDFsolo4000100% (3)
- Chapter9 Braking DCDocumento43 pagineChapter9 Braking DCFrozenTuxNessuna valutazione finora
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDocumento46 pagineChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxNessuna valutazione finora
- Steady-State Analysis of DC MotorsDocumento24 pagineSteady-State Analysis of DC MotorsUsama RaoNessuna valutazione finora
- Speed Control of Single Phase Induction Motor by Android Application Using Wi FiDocumento3 pagineSpeed Control of Single Phase Induction Motor by Android Application Using Wi FiInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- Arduino Based DC Motor Speed ControlDocumento12 pagineArduino Based DC Motor Speed Controlprabhu rachutiNessuna valutazione finora
- DC Motor Speed ControllerDocumento22 pagineDC Motor Speed ControllerShafqt MbrkNessuna valutazione finora
- Reluctance MotorDocumento8 pagineReluctance MotorBindu vNessuna valutazione finora
- Asynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsDocumento10 pagineAsynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsKushagra BhatiaNessuna valutazione finora
- Questions 1Documento11 pagineQuestions 1anvithaNessuna valutazione finora
- Injection of EMF in Rotor Circuit PDFDocumento5 pagineInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- AC Machine Lecture No6Documento43 pagineAC Machine Lecture No6Mohammed Dyhia AliNessuna valutazione finora
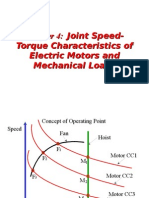
- Joint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsDocumento5 pagineJoint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsFrozenTuxNessuna valutazione finora
- Technical Background On Linear Induction Motors in Transportation Jun 1970Documento99 pagineTechnical Background On Linear Induction Motors in Transportation Jun 1970Shantanu GaikwadNessuna valutazione finora
- Thyristor Voltage Controller - 100494PDocumento15 pagineThyristor Voltage Controller - 100494PNishanga SandamalNessuna valutazione finora
- E1 - Controlled Rectifiers PDFDocumento92 pagineE1 - Controlled Rectifiers PDFmitulNessuna valutazione finora
- Stepper MotorsDocumento26 pagineStepper MotorsRam Kumar GogadaNessuna valutazione finora
- Ee 1403 Solid State DrivesDocumento14 pagineEe 1403 Solid State DrivesPanchi AgrawalNessuna valutazione finora
- Adjustable Speed Induction Motor DriveDocumento21 pagineAdjustable Speed Induction Motor DriveNuwan Bandara100% (1)
- Syllabus of Switched Mode Power ConvertersDocumento1 paginaSyllabus of Switched Mode Power Converterssidharth aggarwalNessuna valutazione finora
- SMPC NotesDocumento98 pagineSMPC NotesHarsha Anantwar100% (1)
- EMEDDocumento128 pagineEMEDAYŞEGÜLNessuna valutazione finora
- Closed Loop Control For A Brushless DC Motor To RuDocumento1 paginaClosed Loop Control For A Brushless DC Motor To RuscribsunilNessuna valutazione finora
- Tutorial Singlephase TransformerDocumento2 pagineTutorial Singlephase TransformerRishi Kant SharmaNessuna valutazione finora
- Introduction To Electric DrivesDocumento75 pagineIntroduction To Electric DrivesVikas PooniaNessuna valutazione finora
- Permanent Magnet Brushless DC MotorDocumento18 paginePermanent Magnet Brushless DC MotorBala SubramanianNessuna valutazione finora
- HV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilDocumento6 pagineHV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilAdnan AliNessuna valutazione finora
- EE 010 402 DC Machines and TransformersDocumento2 pagineEE 010 402 DC Machines and TransformersResmara ShajahanNessuna valutazione finora
- Ed Lab ManualDocumento27 pagineEd Lab ManualBonnieNessuna valutazione finora
- EE2403 Special Electrical MachinesDocumento19 pagineEE2403 Special Electrical MachinesvasanthavananNessuna valutazione finora
- Lab MachineDocumento9 pagineLab MachineAnonymous ryvoPIDNessuna valutazione finora
- Drives Manual Final EeeDocumento60 pagineDrives Manual Final EeenandhakumarmeNessuna valutazione finora
- 16 MarksDocumento4 pagine16 MarksAnand RamanNessuna valutazione finora
- Problem Set 1Documento9 pagineProblem Set 1jerry tranNessuna valutazione finora
- 3 Phase-Controlled DC Motor DrivesDocumento45 pagine3 Phase-Controlled DC Motor DrivesgilmartNessuna valutazione finora
- Induction GeneratorDocumento12 pagineInduction GeneratorSumaira SaifNessuna valutazione finora
- Documentation of PMSMDocumento89 pagineDocumentation of PMSM07be1a0213Nessuna valutazione finora
- Variable Voltage & Frequency Controlled 3 Phase Induction MotorDocumento6 pagineVariable Voltage & Frequency Controlled 3 Phase Induction MotorNAVEED ISHRAQNessuna valutazione finora
- Chapter 1 DC Drives Part1Documento46 pagineChapter 1 DC Drives Part1Mohammad MunzirNessuna valutazione finora
- Wound-Field Synchronous Machine DrivesDocumento62 pagineWound-Field Synchronous Machine DrivesKorlpate BhaskarNessuna valutazione finora
- Speed Torque Characteristics of 3 Phase Induction MotorDocumento4 pagineSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanNessuna valutazione finora
- Altivar 31 ManualDocumento94 pagineAltivar 31 ManualYesid GómezNessuna valutazione finora
- Module PE5: Problem 1Documento4 pagineModule PE5: Problem 1Roshan ShanmughanNessuna valutazione finora
- EG40FD Electrical Machines and Drives Tutorial 6 DC Machine Analysis - SolutionsDocumento3 pagineEG40FD Electrical Machines and Drives Tutorial 6 DC Machine Analysis - Solutionsashuchary54Nessuna valutazione finora
- Electrical MachinesDocumento17 pagineElectrical MachinesTeja50% (2)
- Switching Losses & Snubber CircuitDocumento12 pagineSwitching Losses & Snubber CircuitFrozenTuxNessuna valutazione finora
- Chapter8 Braking GeneralDocumento7 pagineChapter8 Braking GeneralFrozenTuxNessuna valutazione finora
- Joint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsDocumento5 pagineJoint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsFrozenTuxNessuna valutazione finora
- Power Electronic CircuitsDocumento47 paginePower Electronic CircuitsFrozenTuxNessuna valutazione finora
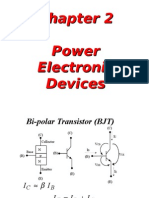
- Chapter2 DevicesDocumento33 pagineChapter2 DevicesFrozenTuxNessuna valutazione finora
- 2011 Renewable Energy Data BookDocumento128 pagine2011 Renewable Energy Data BookFrozenTuxNessuna valutazione finora
- SolarEenergyUtilization ReportDocumento276 pagineSolarEenergyUtilization ReportSatit Phiyanalinmat100% (2)
- Elements of Electric Drive Systems: Mohamed A. El-Sharkawi University of Washington Seattle, WA 98195Documento34 pagineElements of Electric Drive Systems: Mohamed A. El-Sharkawi University of Washington Seattle, WA 98195FrozenTuxNessuna valutazione finora
- Brushless Motor Circuit: EE452: Electric Drive DesignDocumento22 pagineBrushless Motor Circuit: EE452: Electric Drive DesignFrozenTuxNessuna valutazione finora
- TSF SolarAcct FinalDocumento13 pagineTSF SolarAcct FinalFrozenTuxNessuna valutazione finora
- Book 1Documento2.808 pagineBook 1Syariefuddin SyahnanNessuna valutazione finora
- WSS Installation and User ManualDocumento19 pagineWSS Installation and User ManualVishwas MaritronicsNessuna valutazione finora
- CP-011 Series 4.20mm (.165") Assembly Power ConnectorsDocumento1 paginaCP-011 Series 4.20mm (.165") Assembly Power ConnectorsDon Tiburcio De EspedanaNessuna valutazione finora
- E5164 k40 k50 User ManualDocumento28 pagineE5164 k40 k50 User ManualstotallNessuna valutazione finora
- Whisper 100 ManualDocumento36 pagineWhisper 100 Manualsher12345usNessuna valutazione finora
- Deepsea 701 702 Data SheetDocumento2 pagineDeepsea 701 702 Data Sheetzakki ahmadNessuna valutazione finora
- P-2M UserManual V2.2Documento12 pagineP-2M UserManual V2.2Mohamed WahidNessuna valutazione finora
- DN 6724Documento2 pagineDN 6724venvettyNessuna valutazione finora
- Charging & Discharging of A Capacitor by MR - CharisDocumento5 pagineCharging & Discharging of A Capacitor by MR - CharisCharis Israel Ancha67% (3)
- Icom IC-4008A-MK2 Service ManualDocumento31 pagineIcom IC-4008A-MK2 Service ManualYayok S. AnggoroNessuna valutazione finora
- En ENBioScan-F Installation Guide v1.026 DC1-0083ADocumento29 pagineEn ENBioScan-F Installation Guide v1.026 DC1-0083AJosé BrazNessuna valutazione finora
- Color Stabilization of RGB LEDsDocumento8 pagineColor Stabilization of RGB LEDsMartinNessuna valutazione finora
- Question Bank EE372 BMEDocumento3 pagineQuestion Bank EE372 BMEabhilashkrishnantkNessuna valutazione finora
- APS Inverter Sine Wave 1500VADocumento14 pagineAPS Inverter Sine Wave 1500VAAlexei KaramNessuna valutazione finora
- Differance Between ELCB and RCCB?: Answer:For Lighting Loads, Neutral Conductor Is Must and Hence The SecondaryDocumento3 pagineDifferance Between ELCB and RCCB?: Answer:For Lighting Loads, Neutral Conductor Is Must and Hence The SecondaryBeere GangadharNessuna valutazione finora
- Dual-Band Mimo Antenna Using Gradient Arcs For Construction Monitoring and Inspection Systems Based On IiotDocumento6 pagineDual-Band Mimo Antenna Using Gradient Arcs For Construction Monitoring and Inspection Systems Based On IiotTú HoàngNessuna valutazione finora
- ACROSS WP10 03 Emergency Aircraft Control System EACSDocumento1 paginaACROSS WP10 03 Emergency Aircraft Control System EACSanantiaNessuna valutazione finora
- YX3000 English Manual 20200513Documento172 pagineYX3000 English Manual 20200513produccion multipackNessuna valutazione finora
- Comanda Electols Fisier Public ElforumDocumento4 pagineComanda Electols Fisier Public ElforumsumodicaNessuna valutazione finora
- RA100Z ManualDocumento2 pagineRA100Z ManualKrausserRudolfNessuna valutazione finora
- KN120GBDocumento50 pagineKN120GBabde yadaneNessuna valutazione finora
- Wireless Communication NOTES Final Unit - 1Documento34 pagineWireless Communication NOTES Final Unit - 1vsureshaNessuna valutazione finora
- Delta Programable AC Power Source A1500 User Manual - EN - V01Documento99 pagineDelta Programable AC Power Source A1500 User Manual - EN - V01Ulrich angel Fodouop kamdemNessuna valutazione finora
- Remote Visulisation of Synchroscope Using Synchrophasors CBIP WE Oct 2020Documento5 pagineRemote Visulisation of Synchroscope Using Synchrophasors CBIP WE Oct 2020chandan8240000Nessuna valutazione finora
- Sensors Used To Find Out RPM: By-Maheep BhattDocumento15 pagineSensors Used To Find Out RPM: By-Maheep BhattMaheep BhattNessuna valutazione finora